Изобретение относится к подъёмно-транспортному машиностроени о, в частности к вилочным погрузчикам, и предназначено для транспортиройания и опорожнения контейнеров с .плодами.
По основному авт.ев. 889606 известно навесное грузозахватное .устройство к погрузчику, содержащее неподвижную плиту, через которую пропущен вал, на одном конце которого закреплен вилочный захват с прижимом, а второй его конец связан с механизмом поворота вилочного захвата, включающим в себя гидроцилиндр, установленный шарнирно на неподвижной плите с возможностью поворота в вертикальной плоскости. При этом указанный вал выполнен Г-образной формы, второй конец которого располол ен вертикально и шарнирно соединен со штоком ука3энного гидроцилиндра f) .
Недостатком известного устройств является отсутствие фиксации горизонтального положения вилочного захвата при захвате им контейнера, чт снижает надежность в работе устройства.
Целью изобретения - повышение надежности путем фиксации Горизонтального положения вилочного захвата.
Указанная цель достигается тем, что навесное грузозахватное устройсво к погрузчику снабжено закрепленным на неподвижной плите упором призматической фор1«м, две грани которого расположены с возможностью взаимодействия с роликом прижима. , Кроме того, гидроцилиндр механизма поворота вилочного захвата установлен с возможностью вертикального перемещения относительно неподвижной плиты посредством резьбового соединения.
На фиг. 1 изображен-общий вид навесного грузозахватного устройства; на фиг. 2 - разрез А-А на Фиг. 1.
Грузозахватное устройство смонтировано на подъемной каретке 1 погрузчика 2 и содержит неподвижную плиту 3, через которую пропущен вал 4, на одном конце которого смонтирован вилочный захват 5 с прижимом 6, снабженным роликом 7. Дугообразная направляющая 8 жестко закреплена на неподвижной плите 3 таким образом, чтобы ролик 7 при набегани на нее.обеспечивал прижатие контейнера прижимом 6 в определенный момент времени, в данном случае при повороте контейнера на 90 . Захват снабжен боковым упором 9 для удержания контейнера 10 прижимбм 6 в опРедёленный момент времени, в данном случае при повороте контейнера на 90. Вал 4 установлен в подшипнике 11/ смонтированном.на неподвижной
плите 3, и выполнен Г-образной формы, второй конец которого расположен вертикально и шарнирно соединен со штоком гидроцилиндра 12, который расположен в вертикальной плоскости
и шарнирно. закрепленна неподвижной , плите.3. На неподвижной плите 3 закреплен упор 13 призматической формы, две грани которого установлены с возможностью взаимодействия с ролиQ ком 7, движущимся по траектории 14. Упор 13 установлен с возможностью изменения его положения путем перемещения и закрепления в пазах 15, выполненных в плите 3. При выборе оптимального положения упора 13
5 он может быть неподвижно соединен Ь плитой 3.
Конец гидроцилиндра 12 закреплен на неподвижной плите -3 с возможностью изменения расстояния по вер0 тикали посредством болта с вилкой 16 и .гаек 17.
Устройство работает следующим образом.
Контейнер 10 с плодами подбирают
5 вилочным захватом 5, перемещают погрузчиком к месту выгрузки и поднимают на необходимую высоту. После включения гидроцилиндра 12 шток последнего взаимодействует с валом 4 и
0 начинает поворачиваться захват.5с контейнером 10. При повороте контейнер удерживается от выпадания боковым упором 9. После достижения определенного угла поворота, например .
5 90°, когда верхний слой плодов высыпан из контейнера, ролик 7 набегает на направляющую 8, и прижим 6, поворачиваясь на оси,прижимает контейнер.После опорожнения контейнера 10 гидроцилиндр посредством вала 4
0 возвращает вИлочный захват 5 в исходное положение.
При этом ролик 7, взаимодействуя с.упором 13, фиксирует положение вилочного захвата 5 в горизон5 тальном положении. В процессе повторения цикла усилием гидроцилинд- . ра преодолевается сопротивление упора 13. Оптимальное положение упора 13 подбирается регулированием
положения в пазах 15 и крепле ния болтами.
Для регулирования соединения гидроцилиндра с валом конец гидроцилиндра, соединенный с неподвиж5 ной плитой 3, смонтирован с возможностью изменения расстояния по вертикали посредством болта с вилкой 16 и гаек 17..
Таким образом, возврат вилОчного захвата в строго горизонтальное по0ложение и его фиксирование гарантирует сохранение такого положения в момент захвата контейнера и его транспортирования, что обеспечивает надежность выполнения технологичес5 кого процесса при работе устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесное грузозахватное устройство к погрузчику | 1980 |
|
SU889606A1 |
| Навесное грузозахватное устройство к погрузчику | 1985 |
|
SU1279947A1 |
| Поворотная каретка погрузчика | 1986 |
|
SU1335530A2 |
| Кантователь контейнеров к погрузчику | 1987 |
|
SU1418289A2 |
| Кантователь контейнеров для вилочного погрузчика | 1982 |
|
SU1004253A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО К ВИЛОЧНОМУ ПОГРУЗЧИКУ | 1990 |
|
RU2043965C1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Захват-кантователь к погрузчику | 1984 |
|
SU1216146A1 |
| Опрокидыватель контейнеров к вилочному погрузчику | 1988 |
|
SU1541181A1 |

1.НАВЕСНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ по авт.св. № 889606, от.лишающееся тем, что, с целью повышения надеж-: ности путем фиксации горизойтального положения вилочного захвата, оно снабжено закрепленным на неподвижной плите упором призматической формы, две грани которого ра;сположены с возможностью взаимодействия с роликом прижима. 2. Устройство по п. 1, отличающееся тем, что гидроцилиндр механизма поворота вилочного захвата установлен с в.озможностью вертикального перемещения относительно неподвижной плиты посредством резьбового соединения. (Л О СП оо О)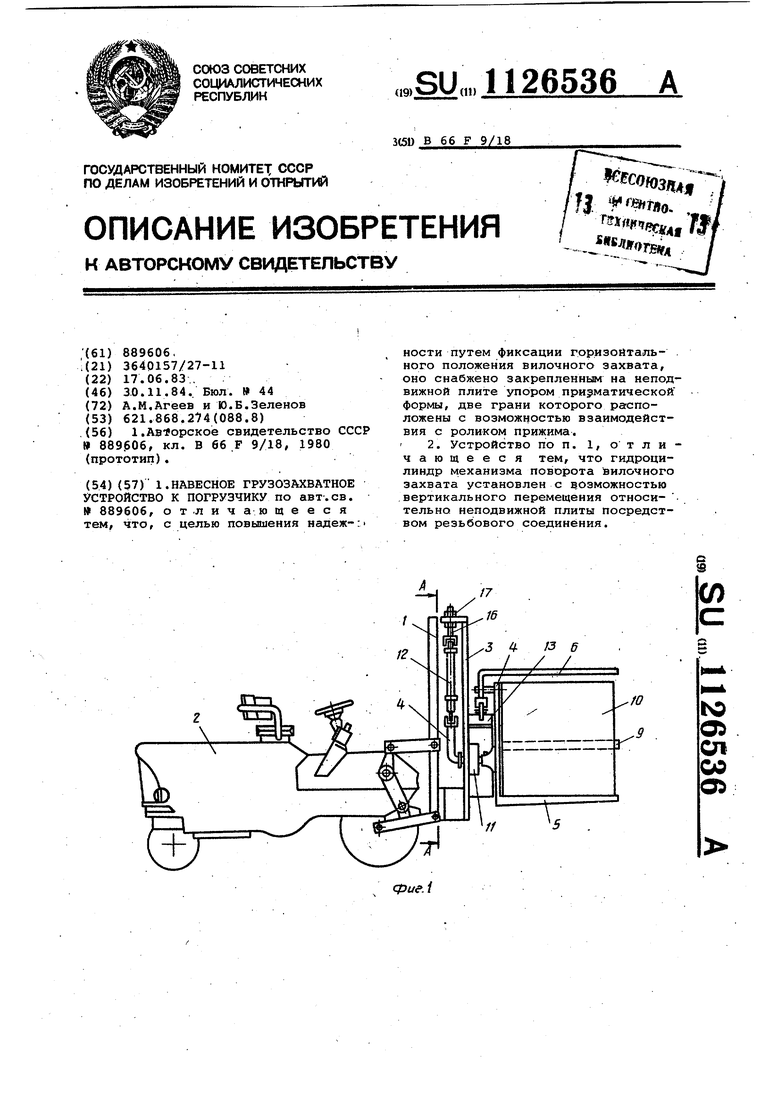
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
