Изобретение относится к сельскохозяйственному машиностроению, в частности к грузоподъемным устройствам.
Известно заднее навесное устройство трактора пожарного агрегата, содержащее верхнюю ось, на которой закреплен с возможностью вращения вокруг нее полый вал с жестко установленными на нем подъемными рычагами и с шарнирно установленной посредством втулки центральной тягой, нижнюю ось для установки на ней гидрокрюка и нижних тяг, которые шарнирно соединены раскосами с подъемными рычагами, в котором, с целью сокращения трудозатрат на монтаж и демонтаж навесных и прицепных орудий, гидрокрюк установлен на нижней оси совместно с нижними тягами, а центральная тяга имеет длину, равную 0,43-0,45 длины нижних тяг, при этом на втулке жестко установлено приспособление для фиксации навесного орудия в транспортном положении; приспособление для фиксации выполнено в виде расположенных по обе стороны от центральной тяги щек с отверстиями, снабженных чекой (SU, авторское свидетельство №969184, кл. А 01 В 59/042, 1982).
К недостаткам описанного устройства, применительно к решаемой нами проблеме, относится то, что при навеске навесного крана-манипулятора невозможно транспортировать в рабочем и транспортном положении на гидрокрюке транспортную тележку для перемещения грузов. Это ограничивает функциональные и эксплуатационные возможности описанного объекта.
Известен также одноосный прицеп с грузоподъемным оборудованием, в котором, с целью расширения эксплуатационных возможностей путем повышения устойчивости прицепа при работе грузоподъемного оборудования и маневренности, свободный конец поворотной оси шарнирно соединен с гидроцилиндром, связанным с рамой, при этом на раме установлен фиксатор положения поворотной оси; поворотная ось выполнена с кольцевой канавкой с возможностью взаимодействия со стержнем, связанным с фиксатором (SU, авторское свидетельство №1221018, кл. В 62 D 63/06, В 60 Р 1/54, 3/28, В 66 С 23/44, 1986).
К недостаткам одноосного прицепного грузоподъемного оборудования относятся чрезмерное усложнение конструкции, недостаточная зона обслуживания, малая грузоподъемность и ограниченная устойчивость.
Известен консольный кран, содержащий опорную колонну, несущую консоль с грузозахватным механизмом и поворотным шарниром, в котором смонтировано тормозное устройство, состоящее из втулки с тормозными дорожками, взаимодействующими с дорожками тормозных элементов, в котором, с целью обеспечения регулирования усилия подтормаживания консоли в зависимости от веса перемещаемого груза, тормозные элементы выполнены в виде колец треугольного сечения, тормозное устройство снабжено установленными с возможностью радиального перемещения клинообразными толкателями, взаимодействующими с указанными кольцами (SU, авторское свидетельство №630205, кл. в 66 С 23/44, 1978).
К недостаткам описанного консольного крана, несмотря на то, что он имеет большую зону обслуживания, относится его стационарность.
Известен консольный кран, содержащий колонну, несущую консоль, телескопическую стрелу с грузозахватным механизмом и гидроприводы консоли и стрелы (GB, патент №2161783, кл. В 66 С 23/36, В 60 Р 1/16, В 60 Р 1/54, 1986).
К недостаткам описанного консольного крана, несмотря на его большую зону обслуживания, также относятся стационарность его положения.
Известен кран-манипулятор, смонтированный на шасси транспортного средства (грузового автомобиля) между кабиной и кузовом, снабженный на верхнем срезе неподвижной части колонны механизмом поворота, стрелой, рукоятью, телескопической балкой с грузозахватным средством, их гидроприводами и опорной балкой с аутотригерами (FR, патент №2559141, кл. В 66 С 23/44, 1985).
К недостаткам данного крана-манипулятора относится то, что для его монтажа на шасси транспортного средства требуется подрамник и дополнительная гидростанция для управления гидроприводами колонны, стрелы, рукояти и телескопической балки.
Более близким аналогом к заявленному объекту относится навесной транспортный погрузчик, включающий поворотную стрелу с подвижными от гидроприводов звеньями и упоры о грунт, в котором, с целью повышения устойчивости трактора относительно его продольной и поперечной оси при подъеме тяжелых грузов на большом плече, упоры выполнены из тяг, образующих с рычагами гидросистемы трактора треугольные фермы, изменяющие плечи и свое положение посредством гидравлической системы (SU, авторское свидетельство №124745, кл. В 66 С 23/44, 1959).
К недостаткам описанного навесного тракторного погрузчика относятся ограниченная грузоподъемность.
Известен также тракторный погрузчик, колонна которого смонтирована посредством переходной плиты и вертикальных осей на заднем мосту трактора (GB, патент №827598, кл. А 01 D 87/00, В 66 С 23/44, 1960).
К недостаткам описанного погрузчика относятся низкая грузоподъемность и ограниченная зона обслуживания.
Наиболее близким аналогом к заявленному объекту является кран-манипулятор, содержащий шасси с установленным на нем опорным устройством, поворотную стрелу с приводом ее подъема и грузозахватный орган, а также пульт управления краном, согласно формуле полезной модели на шасси дополнительно установлена жестко связанная с опорным устройством траверса, которая шарнирно соединена с механизмом поворота, с расположенной на нем оси устройства колонной, причем колонна шарнирно соединена с последовательно установленными и шарнирно связанными стрелой и коленом с телескопической штангой, на конце которой размещен грузозахватный орган, а опорное устройство состоит из балки и размещенных по ее краям выносных опор, установленных с возможностью возвратно-поступательного перемещения в вертикальной и горизонтальной плоскостях, при этом привод перемещения выносных опор в вертикальной плоскости, привод механизма поворота крана, привод подъема стрелы, привод поворота колена и привод выдвижения телескопической штанги выполнены в виде гидроцилиндров, соединенных гидролиниями с баком и пультом управления в виде гидрораспределителя; выносные опоры выполнены в виде аутригеров (RU, свидетельство полезной модели №17526, U1, кл. В 66 С 23/04, 2001).
К недостаткам описанного крана-манипулятора относятся ограниченная зона обслуживания и невысокая грузоподъемность.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - расширение эксплуатационных возможностей путем повышения устойчивости крана-манипулятора в агрегате с транспортным средством в виде трактора сельскохозяйственного профиля.
Технический результат - повышение грузоподъемности и расширение зоны обслуживания.
Указанный технический результат достигается тем, что в известном кране-манипуляторе, монтируемом на шасси транспортного средства и содержащем снабженную механизмом поворота вокруг вертикальной оси подвижную часть, размещенную в неподвижной части основной колонны, соединенную с последовательно установленными и шарнирно связанными стрелой и коленом с телескопической штангой с размещенным на ее конце грузозахватным органом, аутригеры, установленные с возможностью возвратно-поступательного перемещения в вертикальной и горизонтальной плоскостях, и привод перемещения аутригеров в вертикальной плоскости, привод механизма поворота подвижной части колонны, привод подъема стрелы, привод поворота колена и привод выдвижения телескопической штанги в виде силовых гидроцилиндров, соединенных гидролиниями с баком и пультом управления, согласно изобретению привод перемещения выносных опор в горизонтальной плоскости снабжен механизмом управления, при этом пара дополнительных колонн шарнирами попарно и ярусно установленных тяг связана с основной колонной и несущей плитой, установленной с возможностью демонтажа на задних концах лонжеронов рамы транспортного средства и соединенной с лонжеронами рамы средствами крепления и попарно установленными на передней части несущей плиты бугелями, между которыми на передней части несущей плиты смонтирована стойка с захватом для фиксации колена в транспортном положении, а аутригеры размещены соосно вертикальным осям в нижних полых частях основной и дополнительных колонн, на вертикальных осях последних ярусно смонтированы с возможностью вращения между шарнирами тяг двуплечие рычаги, удаленные от оси вращения концы каждого из которых связаны пальцами со штоками силовых гидроцилиндров, основаниями смонтированных посредством пальцев на кронштейнах ярусно размещенных пар тяг; в каждой паре силовых гидроцилиндров, кинематически связанных двуплечим рычагом, штоковая полость одного гидравлически соединена с бесштоковой полостью другого и гидролиниями с пультом управления; каждая пара ярусно установленных тяг соединена с задней частью несущей плиты посредством снабженной фланцем полой оси, размещенной в попарно установленных соосных кронштейнах, а фланец оси средствами крепления зафиксирован в верхнем кронштейне; каждый шарнир тяги имеет пару подшипников скольжения; дополнительная колонна образована с фланцем в нижней части и заглушкой в полости верхней части полой осью, на внешней поверхности которой с чередованием между шарнирами ярусно смонтированных тяг размещены двуплечий рычаг и дистанционная втулка, осевые смещения шарниров с подшипниками скольжении, дистанционной втулки и двуплечего рычага ограничены крышкой, размещенной на заглушке; между верхним срезом полой оси и крышкой размещен комплект прокладок; двуплечий рычаг размещен на полой оси между парой верхних смежных рычагов; двуплечий рычаг размещен на полой оси между парой нижних смежных рычагов; основная колонна образована с фланцем в нижней части и заглушкой в полости верхней части полой осью, на внешней поверхности которой с чередованием смонтированы шарниры пары тяг дополнительных колон, при этом между фланцем в нижней части полой оси размещена дистанционная втулка, а в верхней части полой оси посредством шпонки установлен кривошип, соединенный пальцем с верхней тягой связи с дополнительной колонной, а образованная верхней частью полой оси и заглушкой замкнутая полость с размещенными на заглушке упорным подшипником и радиальными подшипниками подвижной части колонны закрыты крышкой, на которой с возможностью демонтажа размещен привод механизма поворота подвижной части колонны; между верхним срезом полой оси и крышкой размещен комплект прокладок; между крышкой и корпусом привода механизма поворота подвижной части колонны установлена прокладка; основная и дополнительная колонны выполнены равновеликими; аутригеры закреплены на фланцах полых осей колонн.
За счет установки в кране-манипуляторе механизма управления перемещениями опор дополнительных колонн и аутригеров в их нижних частях достигается указанный выше технический эффект.
Изобретение поясняется чертежами.
На фиг.1 изображен кран-манипулятор в транспортном положении, вид слева.
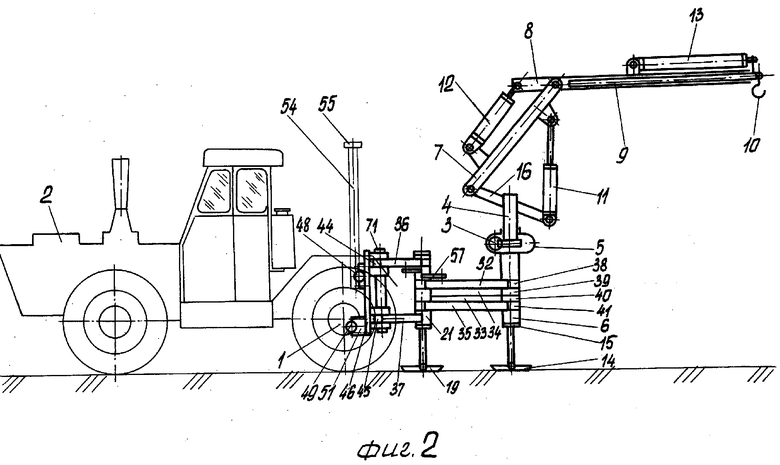
На фиг.2 представлен кран-манипулятор в рабочем положении в агрегате с трактором класса тяги 3 колесной модификации, вид слева.
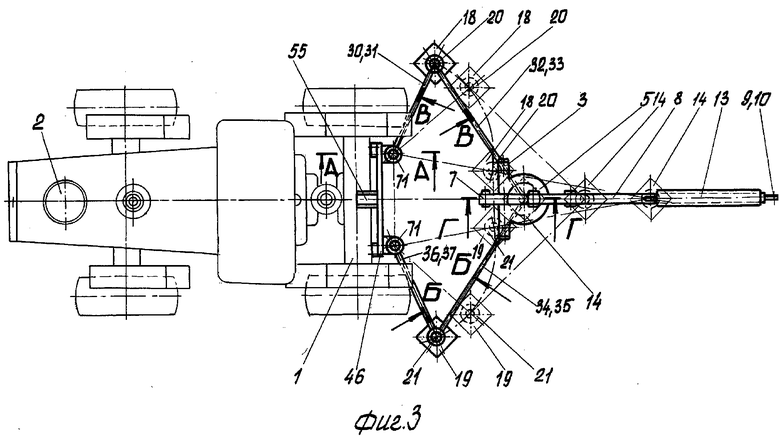
На фиг.3 - то же, вид в плане, при осесимметричном положении трактора и крана-манипулятора.
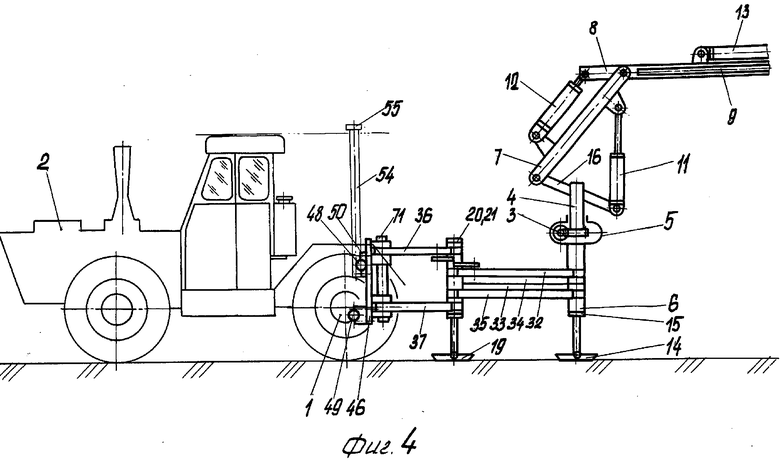
На фиг.4 - то же, при максимальном удалении основной колонны от заднего моста трактора, вид слева.
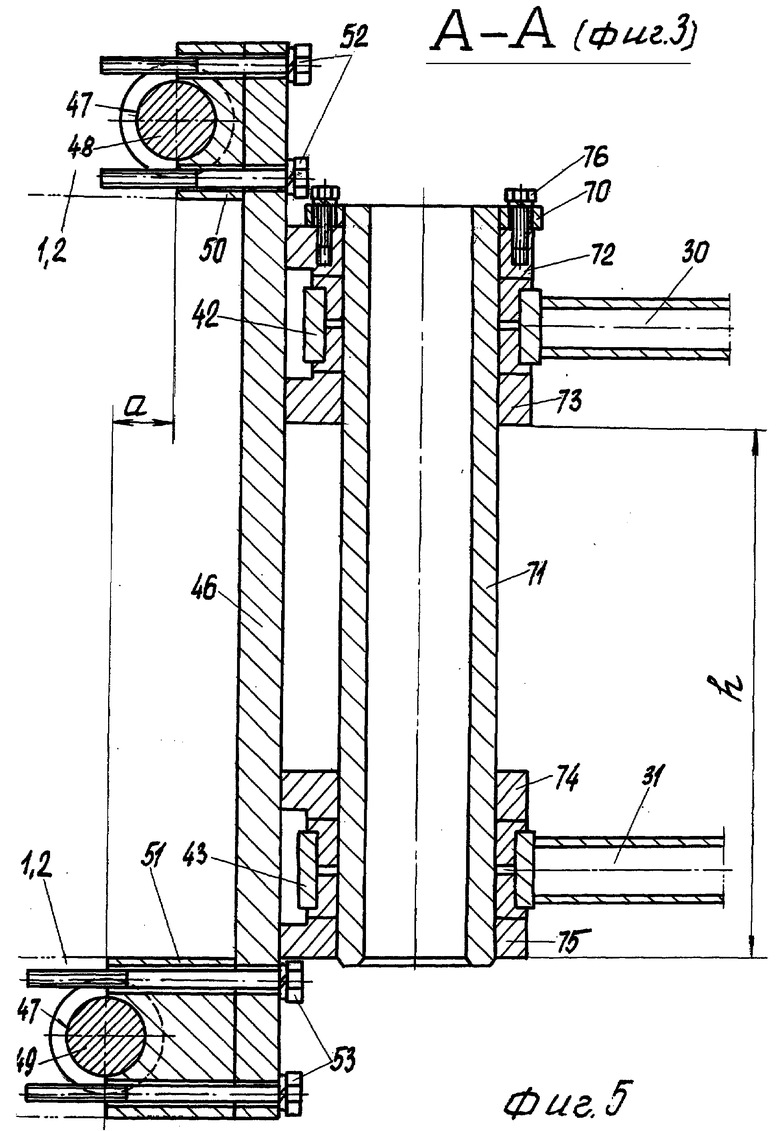
На фиг.5 - сечение А-А на фиг.3, поперечно-вертикальный разрез несущей плиты соединения шарниров и оси попарно и ярусно установленных тяг для связи с дополнительной колонной.
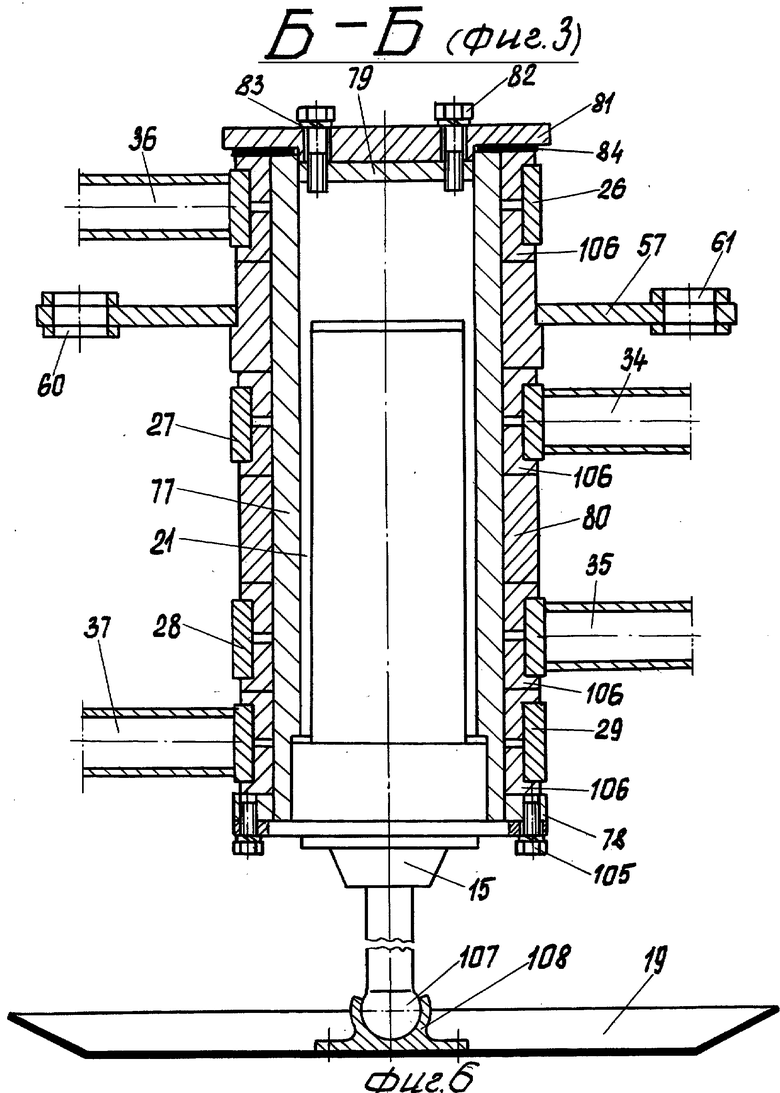
На фиг.6 - сечение Б-Б на фиг.3, диаметральный разрез левой дополнительной колонны с аутригером в ее нижней части.
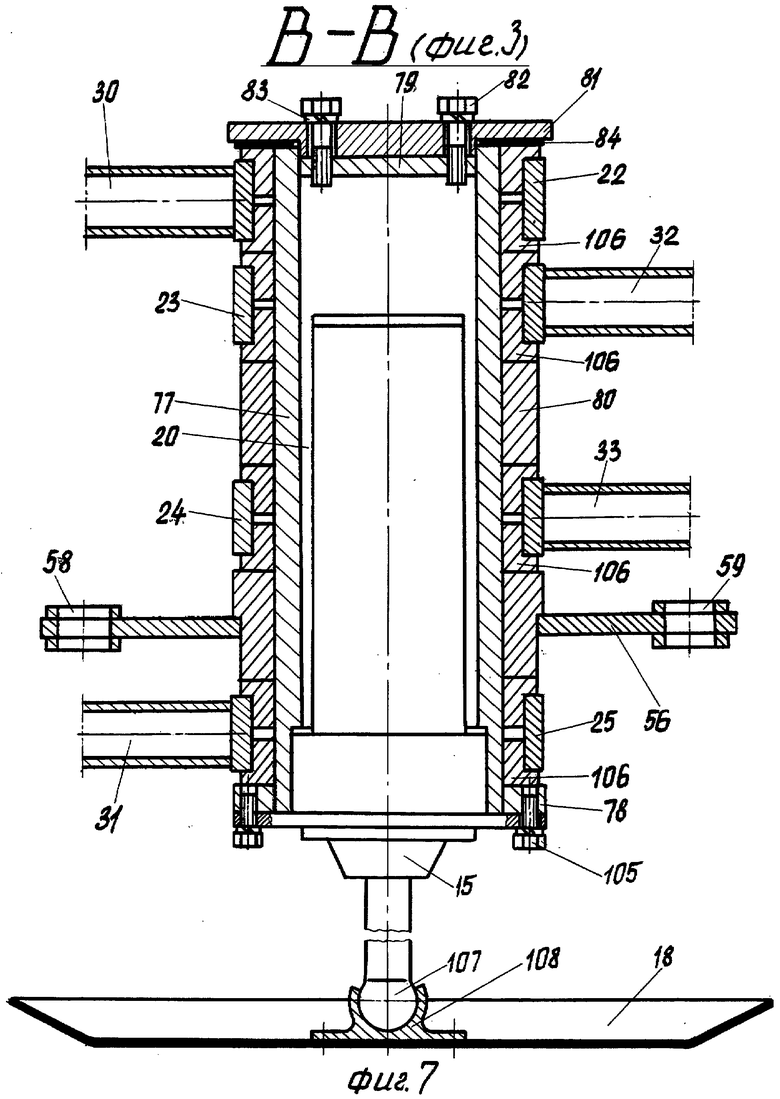
На фиг.7 - сечение В-В на фиг.3, диаметральный разрез правой дополнительной колонны с аутригером в ее нижней части.
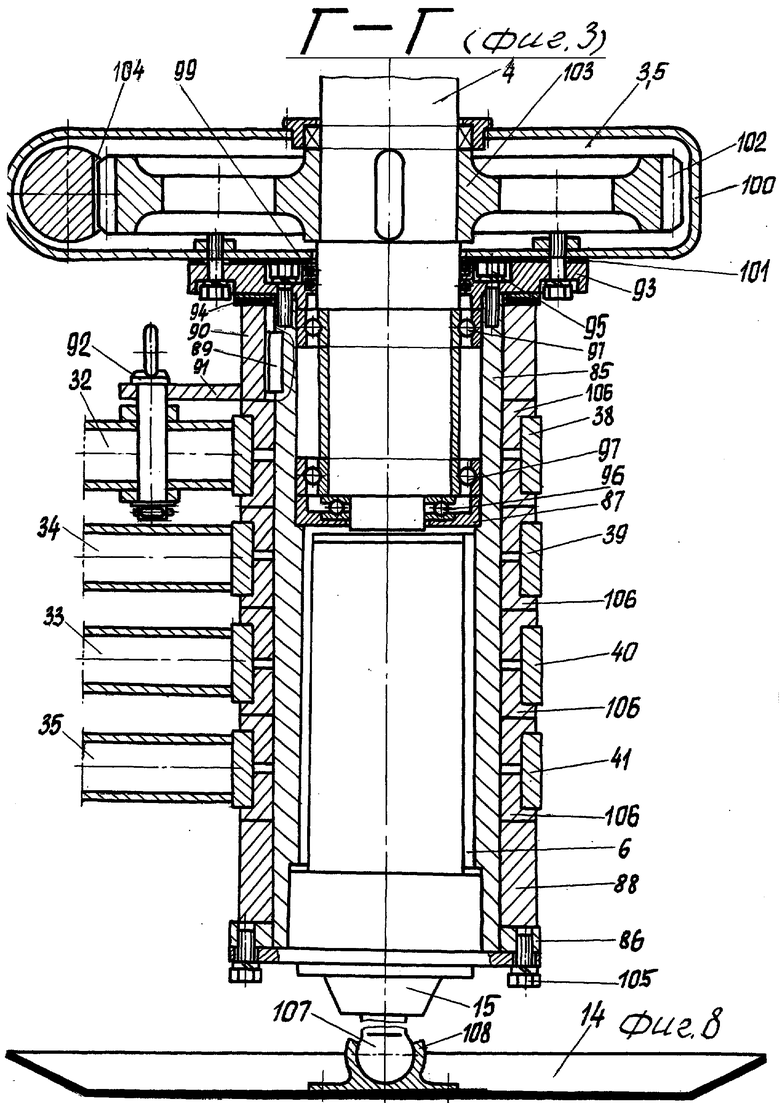
На фиг.8 - сечение Г-Г на фиг.3, диаметральный разрез основной колонны с механизмом поворота и аутригером в ее нижней части.
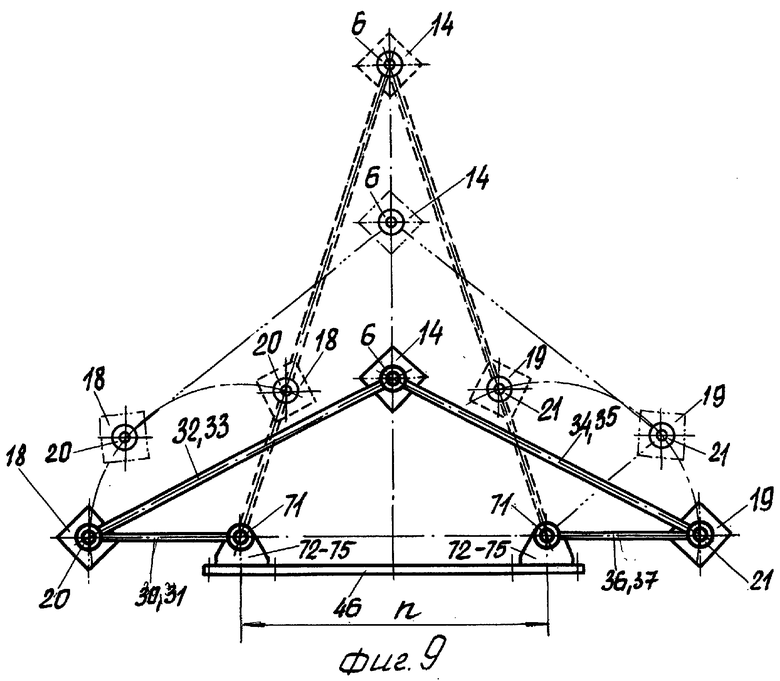
На фиг.9 схематично показаны положения аутригеров в транспортном (минимальном), промежуточном и максимальном удалениях от несущей плиты крана-манипулятора, вид в плане.
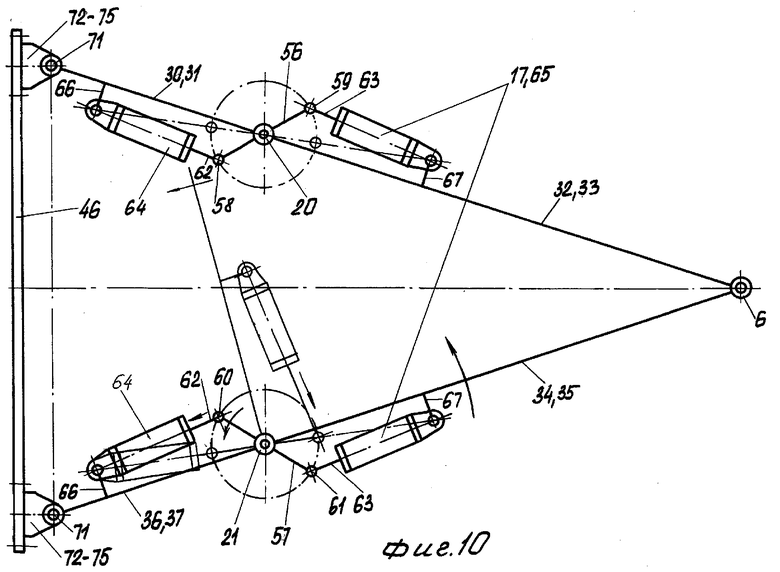
На фиг.10 представлен в кинематической связи механизм управления приводом перемещения выносных опор в горизонтальной плоскости (горизонтальных поступательных перемещений опорных балок с аутригерами), вид в плане.
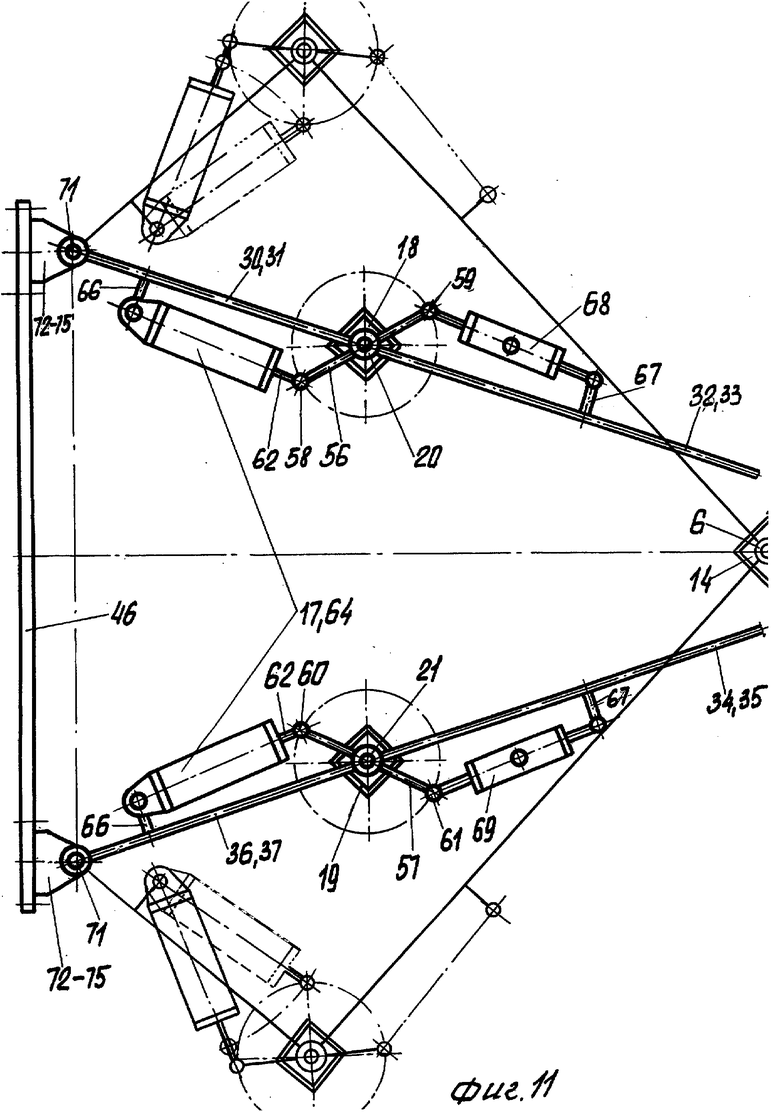
На фиг.11 изображена кинематика опорных балок с аутригерами при максимальном удалении основной колонны от несущей плиты крана-манипулятора, вид в плане.
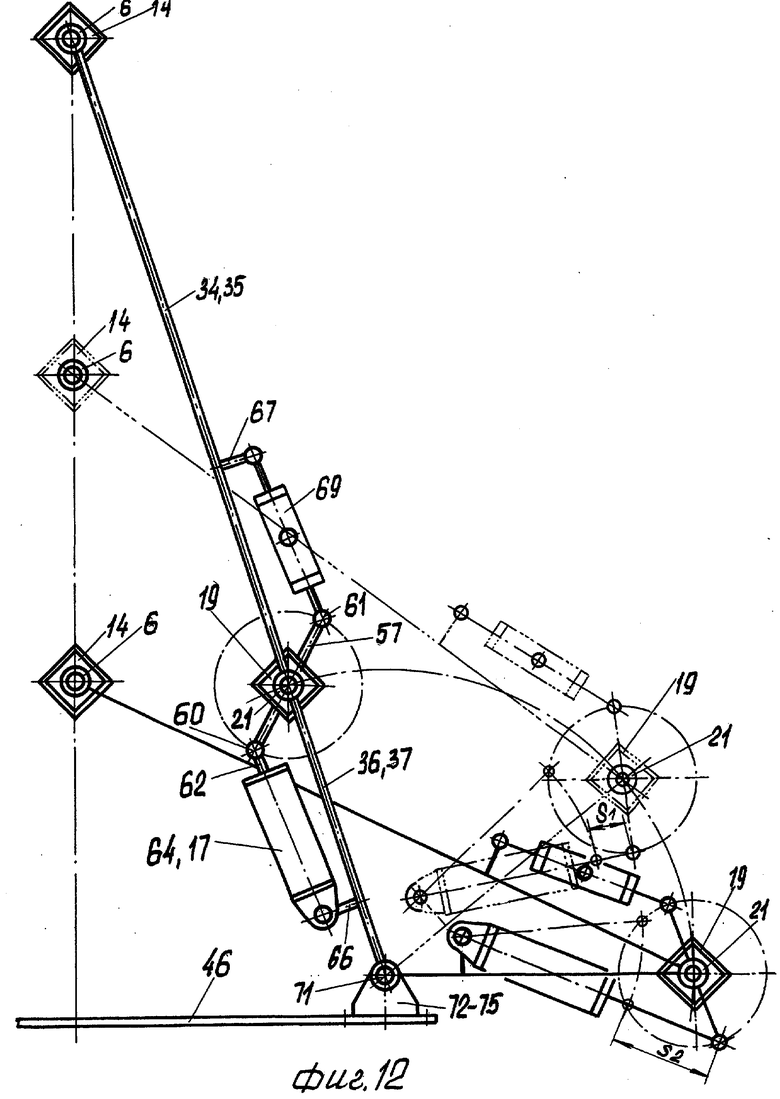
На фиг.12 - то же, при переводе левой секцией механизма управления приводом и перемещения из рабочего положения при максимальном удалении основной колонны в транспортное положение, вид в плане.
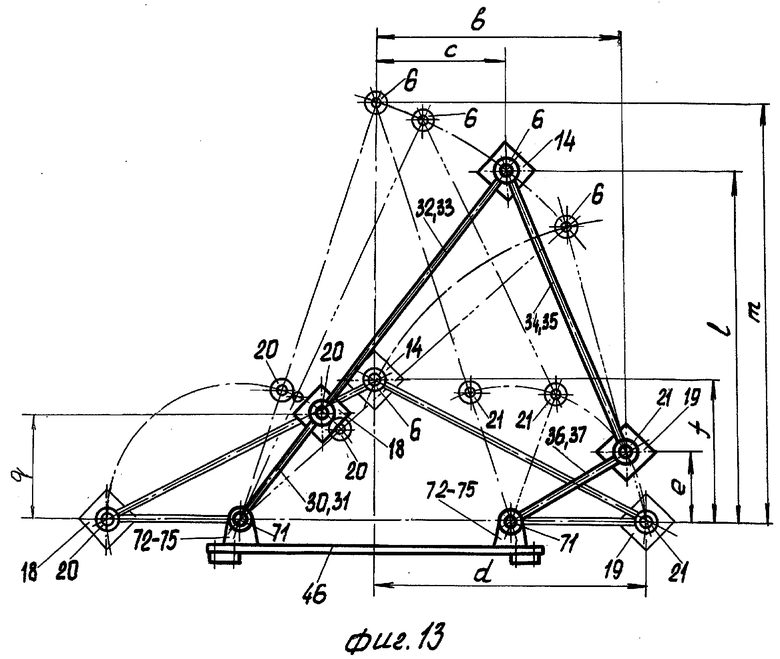
На фиг.13 - то же, при установке механизмом управления основной колонны со смещением в бок (влево) от продольной плоскости симметрии, вид в плане.
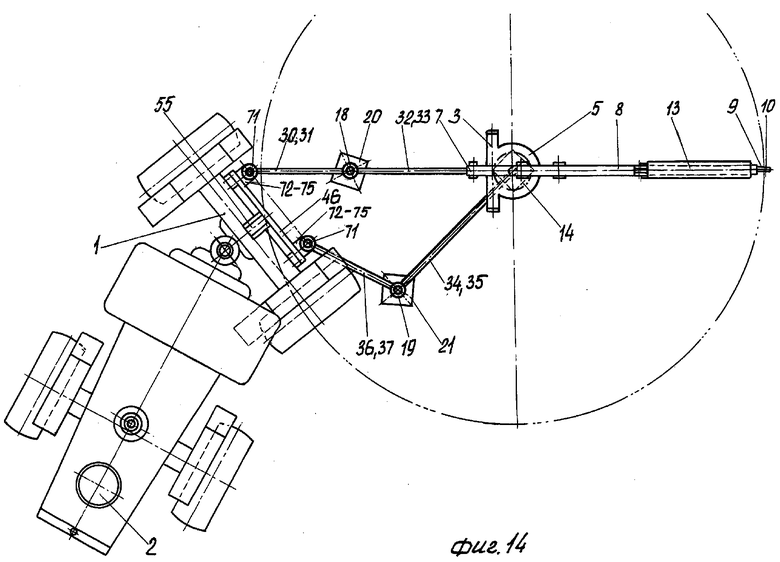
На фиг.14 представлен кран-манипулятор в рабочем положении при выполнении погрузочных работ в труднодоступных местах (из-за угла), вид в плане.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Кран-манипулятор смонтирован на шасси 1 транспортного средства 2 (см. фиг.1-4, 14). Кран-манипулятор содержит снабженную механизмом 3 поворота вокруг вертикальной оси подвижную часть 4, размещенную в неподвижной части 5 основной колонны 6. На основной колонне 6 последовательно установлены и шарнирно связаны стрела 7, колено 8 с телескопической штангой 9 с размещенным на ее конце грузозахватным органом 10, например крюком.
Основная колонна 6, соединенная с последовательно установленными и шарнирно связанными стрелой 7 и коленом 8, имеет гидроприводы 11, 12 и 13 для перемещения в горизонтальной и вертикальной плоскостях грузозахватного органа 10, следовательно, и груза, подлежащего погрузке.
Кран-манипулятор снабжен выносной опорой 14 в виде аутригера 15.
Выносная опора 14 в виде аутригера 15 установлена на кране-манипуляторе с возможностью возвратно-поступательного перемещения в вертикальной и горизонтальной плоскостях. Аутригер 15 имеет привод перемещения в вертикальной плоскости.
Подвижная часть 4 основной колонны 6 снабжена балкой 16. На балке 16 посредством шарниров размещены стрела 7 и основание гидропривода 11. Колено 8 в виде двуплечего рычага с возможностью поворота смонтировано на конце стрелы 7 и с ним дополнительно кинематически связан гидроприводом 12. В полости колена 8 установлена телескопическая штанга 9, перемещаемая гидроприводом 13.
Привод перемещения выносной опоры 14 в вертикальной плоскости, привод механизма 3 поворота подвижной части 4 колонны 6, привод 11 подъема стрелы 7, привод 12 поворота колена 8 и привод 13 выдвижения телескопической штанги 9 в виде силовых гидроцилиндров соединены гидролиниями с баком и пультом управления.
Снабженный механизмом 17 (фиг.10, 11 и 12) управления привод перемещения выносных опор 18 и 19 в горизонтальной плоскости выполнен в виде пары дополнительных колонн 20 и 21. Дополнительные колонны 20 и 21 связаны шарнирами 22, 23, 24, 25 (фиг.7) и 26, 27, 28, 29 (фиг.6) попарно и ярусно установленными тягами 30, 31, 32, 33 и 34, 35, 36, 37 с основной колонной 6 шарнирами 38, 39, 40, 41 и шарнирами 42, 43, 44, 45 с несущей плитой 46 (см. фиг.1-14).
Несущая плита 46 (см. фиг.1-4, 5, 9-14) установлена с возможностью демонтажа на задних концах лонжеронов 47 шасси 1 рамы транспортного средства 2. Плита 46 соединена средствами крепления с лонжеронами 47 рамы шасси 1 (фиг.5). В кронштейнах лонжеронов 47 в тракторах сельскохозяйственного профиля размещены верхняя и нижняя оси гидронавесной системы для навески посредством тяг набора сельскохозяйственных машин. Для агрегатирования предлагаемого крана-манипулятора с шасси 1 транспортного средства 2 демонтируют редуктор вала отбора мощности (ВОМ) и гидронавесную систему в целом, разъединив верхнюю и нижнюю оси из выемок лонжеронов 47.
Устойчивость несущей плиты 46 с лонжеронами 47 рамы транспортного средства 2 обеспечивают попарно установленные втулки 48 и 49 в бугелях 50 и 51 на передней части несущей плиты 46 и средств крепления 52 и 53. Средства крепления 52 и 53 ввернуты в резьбовые отверстия кронштейнов лонжеронов 47. Втулки 48 и 49 исключают смещения несущей плиты 46 относительно шасси 1 транспортного средства 2. Оси втулок 48 и 49 в поперечно-вертикальных плоскостях смещены на расстояние «а» (фиг.5).
Между бугелями 50 и 51 на передней части несущей плиты 46 транспортного средства 2 смонтирована стойка 54 с захватом 55 (см. фиг.1-4, 14) для фиксации колена 8 в транспортном положении. Захват 55 размещен выше крыши кабины транспортного средства 2.
Механизм 17 управления приводом перемещения выносных опор 18 и 19 в горизонтальной плоскости выполнен в виде двуплечих рычагов 56 и 57 (см. фиг.10-12), смонтированных и установленных с возможностью вращения на вертикальных осях дополнительных колонн 20 и 21 между шарнирами 26, 27 (57) и 24, 25 (56) на противоположных концах тяг 36 и 34, 33 и 31 с несущей плитой 46 и шарнирами 38, 39, 40 и 41 основной колонны 6. Удаленные концы 58, 59 (60 и 61) (см. фиг.10 и 11) от оси вращения каждого двуплечего рычага 56 (57) связаны пальцами со штоками 62 и 63 силовых гидроцилиндров 64 и 65. Основания гидроцилиндров 64 и 65 смонтированы посредством пальцев на кронштейнах 66 и 67 ярусно размещенных парах тяг 31, 33 и 34, 36. В каждой паре силовых гидроцилиндров 64 и 65, кинематически связанных двуплечим рычагом 56 (57), штоковая полость одного гидравлически соединена с бесштоковой полостью другого и гидролиниями с пультом управления крана-манипулятора.
Для упрощения конструкции механизма 17 управления одно из плеч двуплечего рычага 56 (57) соединено с тягой 33 (34) посредством винтового талрепа 68 (69) (см. фиг.11 и 12).
Каждая пара ярусно установленных тяг 30, 31 и 36, 37 кинематической связи с дополнительными колоннами 20 и 21 соединена с задней частью несущей плиты 46 посредством снабженных фланцами 70 полых осей 71 (см. фиг.5). Каждая полая ось 71 размещена в попарно установленных соосных кронштейнах 72, 73 и 74, 75. Пары кронштейнов 72, 74 и 73, 75 взаимно смещены по высоте опорной плиты 46 на величину h (фиг.5). Кронштейны 72-75 с несущей плитой 46 соединены сварными швами и образуют неразъемный узел. Фланец 70 оси 71 средствами крепления 76 зафиксирован в верхнем кронштейне 72 опорной плиты 46. Оси 71 на несущей плите 46 взаимно удалены на расстояние «n» и образуют поперечную базу крана-манипулятора (см. фиг.9).
Левая дополнительная колонна 19 (фиг.6) (по ходу движения транспортного средства 2) образована полой осью 77 соответствующего диаметра. Полая ось 77 снабжена фланцем 78 в нижней части и заглушкой 79 в полости верхней части оси 77. Заглушка 79 и фланец 78 на нерабочих участках полой оси 77 взаимно соединены сварными швами. На внешней поверхности полой оси 77 с чередованием между шарнирами 26, 27 и 27, 28 ярусно смонтированных тяг 36, 34, 35, 37 размещены двуплечий рычаг 57 и дистанционная втулка 80. Осевые смещения шарниров 26-29, дистанционной втулки 80 и двуплечего рычага 57 ограничены крышкой 81. Крышка 81 размещена на заглушке 79 и с ней соединена средствами крепления в виде болтов 82 и шайб 83. Между верхним срезом полой оси 77 и крышкой 79 размещен комплект прокладок 84. Конструкция правой дополнительной колонны 20 (см. фиг.7) идентична конструкции левой дополнительной колонны 19. Двуплечий рычаг 56 правой дополнительной колонны 20 размещен на полой оси 77 между парой шарниров 24 и 25 нижних смежных рычагов 33 и 31 (см. фиг.3 и 7). Двуплечий рычаг 57 левой дополнительной колонны 33 и 31 размещен на полой оси 77 между парой шарниров 26 и 27 верхних смежных рычагов 36 и 34 (см. фиг.3 и 6)
Основная колонна 6 образована полой осью 85, на внешней поверхности которой с чередованием смонтированы шарниры 38, 39, 40, 41 пары тяг 32, 33 и 34, 35 для связи с дополнительными левой и правой колоннами 21 и 20 (см. фиг.3 и 8). Полая ось 85 снабжена фланцем 86 в нижней части и заглушкой 87 в полости верхней части полой оси 85. Между фланцем 86 в нижней части полой оси 85 и шарниром 41 тяги 35 размещена дистанционная втулка 88. В верхней части полой оси 85 выше шарнира 38 тяги 32 посредством призматической шпонки 89 установлена втулка 90 с кривошипом 91. Кривошип 91 пальцем 92 соединен с верхней тягой 32 связи основной колонны 6 с правой дополнительной колонной 20. Торец полой оси 85 закрыт крышкой 93. Между верхним срезом полой оси 85 и крышкой 93 размещен комплект прокладок 94. Крышка 93 на торце полой оси 85 закреплена средствами крепления 95. Крышка 93 и заглушка 87 в верхней части полой оси 85 образуют замкнутую герметичную полость. В замкнутой полости в верхней части оси 85 размещены упорный подшипник 96 на заглушке 87 и радиальные подшипники 97 и 98 подвижной части 4 колонны 6. Герметичность замкнутой полости полой оси 85 обеспечивают кольца 99 в крышке 93. На крышке 93 с возможностью демонтажа размещен привод механизма 3 поворота подвижной части 4 колонны 6. Между крышкой 93 и корпусом 100 привода механизма 3 поворота подвижной части 4 колонны 6 установлена прокладка 101.
Привод механизма 3 выполнен в виде шестерни 102, установленной ступицей 103 на подвижной части 4 колонны 6. Венец шестерни 102 связан с рейкой 104, соединенной со штоками силовых цилиндров. Силовые гидроцилиндры гидролиниями гидравлически связаны с баком и пультом управления крана-манипулятора.
Основная колонна 6 и дополнительные колонны 20 и 21 выполнены равновеликими. Пара дополнительных колонн 20, 21 и основная колонна 6 снабжены аутригерами 15. Аутригеры 15 размещены соосно вертикальным осям в нижних полых частях колонн 6, 20, 21. Аутригеры 15 имеют посадочные места в нижних полостях полых осей 77 и 85 и закреплены средствами крепления 105 на их фланцах 78 и 86 (см. фиг.6, 7 и 8).
Для обеспечения гарантированного срока службы крана-манипулятора каждый шарнир 22, 23, 24, 25, 26, 27, 28, 29 38, 39, 40, 41, 42, 43, 44, 45 тяг 30-37 имеет пару подшипников скольжения 106. Каждый из них каналами связан с пресс-масленками. В конструкции двуплечих рычагов 56 и 57 предусмотрены подшипники скольжения и пресс-масленки.
Каждый из силовых гидроцилиндров 11-13 и цилиндры аутригеров 15 снабжены гидрозамками, исключающими самопроизвольные перемещения их штоков. Гидроцилиндры связаны рукавами высокого давления и трубопроводами с панелью, разделяющей гидросистему крана-манипулятора от гидросистемы транспортного средства 2.
Опоры 14, 18 и 19 (см. фиг.6, 7 и 8) со штоками аутригеров 15 соединены посредством сферических шарниров 107 и шаровых гнезд 108.
Кран-манипулятор работает следующим образом.
С шасси 1 транспортного средства 2 демонтируют посредством простейших приспособлений гидронавесную систему вместе с силовым цилиндром, верхней и нижней осями и тягами. На лонжеронах 47 (фиг.5) посредством втулок 48 и 49 монтируют несущую плиту 46, а вместе с ней и остальные узлы в требуемой кинематической связи. Рукавами высокого давления панель с штуцерами крана-манипулятора соединяют с раздельно-агрегатной гидросистемой транспортного средства 2. Без нагрузки на грузозахватном органе 10 оператор проверяет за счет гидроприводов работу всех механизмов.
Механизмом управления 17 выносные опоры 18 и 19 дополнительных колон 20 и 21 и опора 14 основной колонны 6 в зависимости от конкретных условий работы могут быть установлены следующим образом (см. фиг.13 и 14):
1) с наибольшей поперечной базой «2 d» при установке опор 18 и 19 и наименьшем удалении «f» опоры 14 вместе с основной колонной 6;
2) с наибольшим удалением основной колонны 6 на расстоянии «m» от полых осей 71 несущей плиты 46 на шасси 1 транспортного средства 1;
3) при смещении опоры 14 вместе с основной колонной 6 в бок от продольно-вертикальной плоскости симметрии шасси 1 на расстоянии «С» и удалении «l» при работе в труднодоступных местах для транспортного средства 2.
Для приведения крана-манипулятора в рабочее положение, изображенное на фиг.2, 3, 4, 9, 10, 11, 12, оператор, перемещая ручки соответствующих гидрозолотников гидрораспределителя, используемого в качестве пульта управления, положения попарно и ярусно размещенных тяг 30, 31 и 36, 37 из положения с максимальным вылетом S2 (фиг.12) штоков 62 гидроцилиндров 64 механизма 17 приводит через промежуточные положения с ходом S1 штоков 62 в крайнее дальнее положение опоры 14 с основной колонной 6. При полностью втянутых штоках 62 и 63 в гильзы силовых цилиндров 64 и 65, их основания посредством кронштейнов 66 и 67 и за счет двуплечих рычагов 56 и 57 на дополнительных колоннах 20 и 21 пары тяг 30, 31, 32, 33 и 34, 35, 36, 37 размещаются по прямым линиям, обеспечивая этим максимальное удаление «m» колонны 6 от шасси 1 транспортного средства 2 и обеспечивая этим наибольшую зону обслуживания при погрузке грузов грузозахватным средством 10 на конце телескопической штанги 9 в колене 8. Далее оператор приводит аутригеры 15 в рабочие положения. Каждая колонна (6, 20 и 21) в этом случае занимает свое устойчивое положение на опорах (14, 18 и 19). Это обеспечивает большую грузоподъемность стрелы 7 при наибольшем удалении грузозахватного органа 10 в телескопической штанге 9, установленной в полости колена 8.
При работе в сложных условиях механизмом 17 за счет адресного управления парами силовых цилиндров 64 и 65 пары тяг 31, 31 и 32, 33 устанавливают на одной прямой линии, а управление перемещением штока 62 силового гидроцилиндра 64 позволяет замкнутую кинематическую цепь установить в одно из положений, показанных на фиг.13. Опора 19 от исходного транспортного положения сместится в положение «е», а опора 18 - в положение с удалением «q» (см. фиг.13). В таком положении (см. фиг.14) кран-манипулятор в агрегате с транспортным средством 2 могут работать в труднодоступных местах, в складских условиях и при ведении строительных работ, ремонте каналов и оросительных систем.
При погрузке и разгрузке контейнеров большой тоннажностью оператор механизмом 17 опоры 18, 19 и 14 устанавливает по вершинам равнобедренного треугольника и вместе с базой «n» несущей плиты 46 на шасси 1 образуют устойчивую базу для подъема на большую высоту грузов (см. фиг.2, 3, 9, 11, 12).
При переводе крана-манипулятора в транспортное положение оператор сначала аутригеры 15 в основной колонне 6 и дополнительных колоннах 20 и 21 приводит в транспортное положение, обеспечивая опорам 14 и 19 наибольший транспортный просвет (см. фиг.1). Далее, механизмом 17 и управляя последовательно гидроцилиндрами 64 и 65, складывает пары тяги 30, 31, 32, 33, 34, 34, 36 и 37 так, что колонна 6 с опорой 14 были максимально приближены к несущей плите 46. Оператор включает в работу силовые цилиндры механизма 3 и перемещением рейки 104 через шестерню 102 поворачивает подвижную часть колонны 4 вместе с балкой 16. Затем стрелой 7 колено 8 укладывают на захват 55 стойки 54. Захват 55 фиксирует колено 8 с грузозахватным средством 10 в транспортном положении, исключая этим какие-либо случайные перемещения.
Описанная конструкция крана-манипулятора обеспечивает повышение грузоподъемности и большую зону обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к подъемным устройствам. Кран-манипулятор, смонтированный на шасси 1 транспортного средства, содержит колонну 6 с подвижной 4 и неподвижной 5 частями, выносные опоры, стрелу 7, колено 8, телескопическую штангу 9, грузозахватный орган 10 и их гидроприводы. Кран-манипулятор имеет гидроприводы для перемещения в вертикальной и горизонтальной плоскостях грузозахватного органа. Выносные опоры в виде аутригеров установлены с возможностью возвратно-поступательного перемещения в вертикальной и горизонтальной плоскостях. Снабженный механизмом управления привод перемещения выносных опор в горизонтальной плоскости выполнен в виде пары дополнительных колонн, связанных шарнирами попарно и ярусно установленных тяг с основной колонной и несущей плитой, установленной с возможностью демонтажа на задних концах лонжеронов рамы транспортного средства. Аутригеры размещены соосно вертикальным осям в нижних полых частях колонн. Кран-манипулятор обеспечивает повышение грузоподъемности и расширяет зону обслуживания. 12 з.п. ф-лы, 14 ил.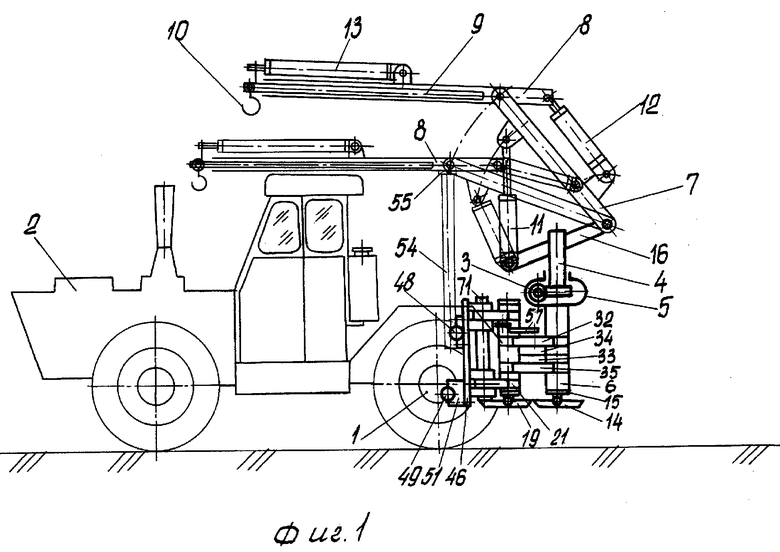
| Трансформатор для дуговой сварки | 1928 |
|
SU17526A1 |

