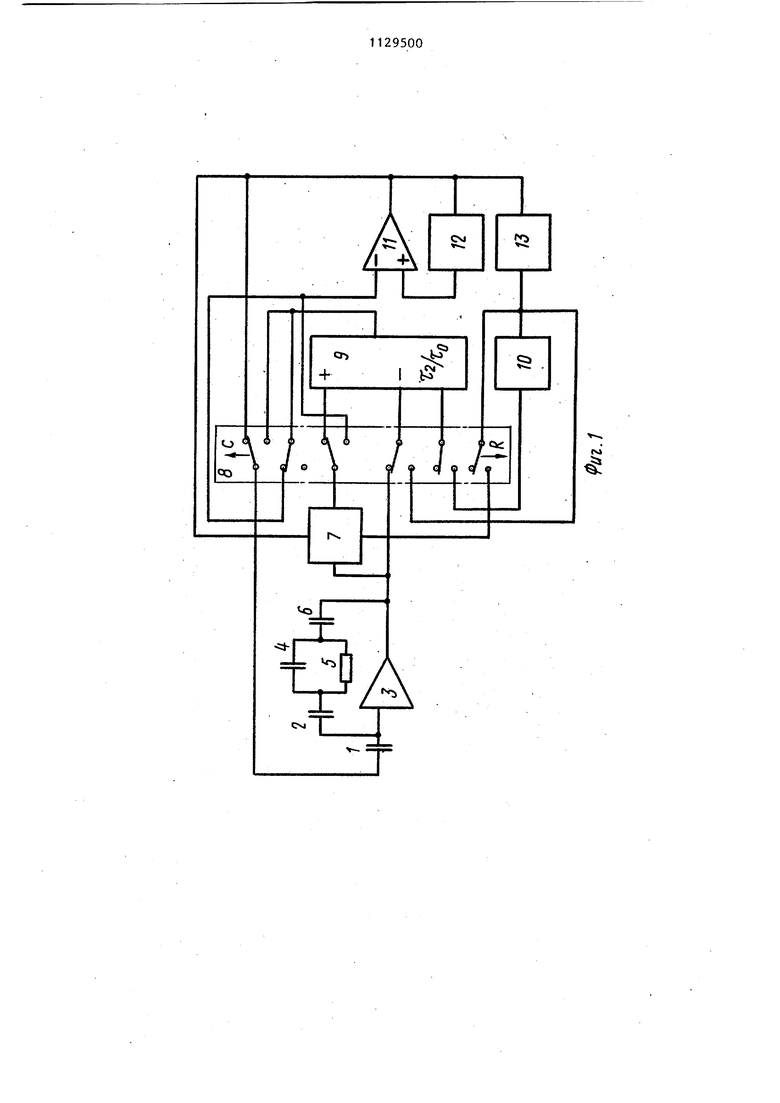
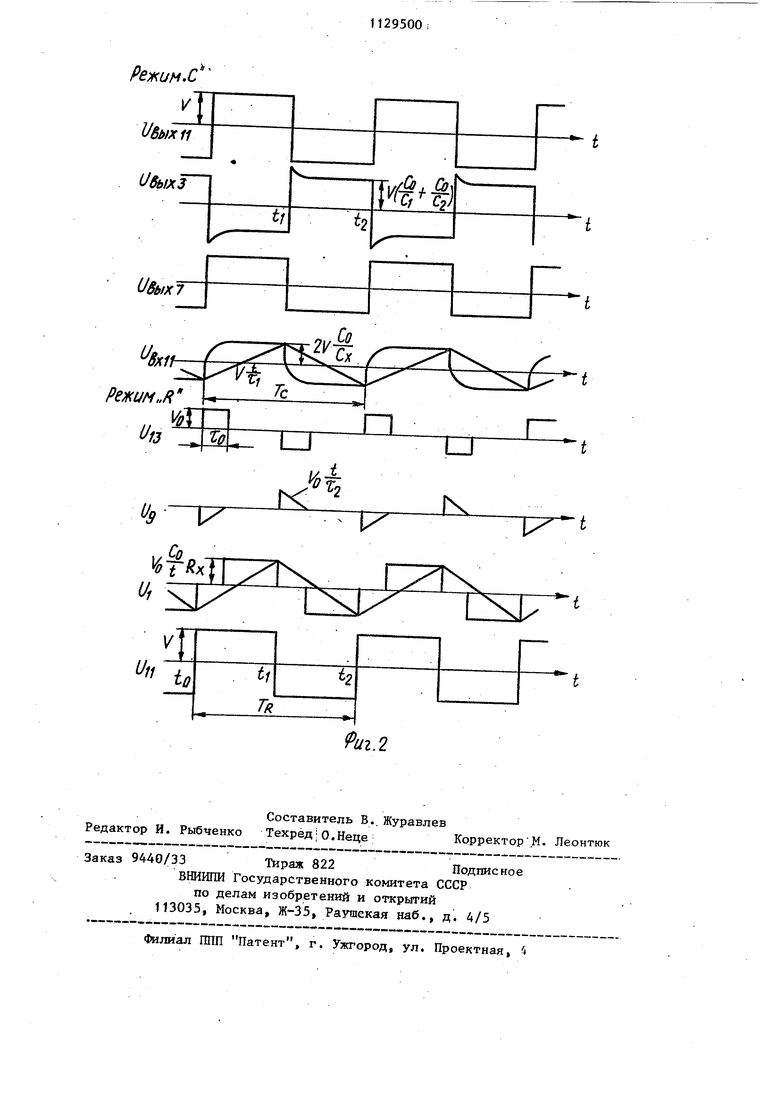
Изобретение относится к измерительной технике, в частности к устройствам, измеряющим температуру и крутящий момент вращающихся деталей и механизмов. Известно устройство для измерения физических параметров на корпусе вра щающегося объекта, содержащее первичные преобразователи, усилитель на пряжения постоянного тока, контакт ые кольца, регистрирующий прибор, преобразователь и токовый прибор СО Устройство сложно в реализации, имеет значительную погрешность, обус ловленную дрейфом нуля элементов, не высокую надежность, обусловленную изнобом контактных колец. Наиболее близким по технической сущности к предлагаемому является устройство для бесконтактного измерения параметров вращающихся деталей машин, содержащее датчик измеряемой температуры, устройство калибровки, циклический коммутатор, полупроводниковый усилитель, генератор пит;ания датчиков, ис1точник питания вращающегося блока аппаратуры, два варикапа вращающийся конденсатор связи, враща ющуюся и неподвижную катушки, датчик углового положения вала, триггер, переключатель, генератор напряжения накачки, усилительно-преобразовательный блок, запоминающее .устройство и устройство для регистрации и контроля измеряемой температуры 2. Недостатками указанного устройства являются влияние на результат измерения изменения емк.ости вращающегося конденсатора, наличие дополнительной погрешности преобразования обусловленной неидеальностью парамет ров вращающегося трансформатора, невозможность получения информации о крутящем моменте. Цель изобретения - повышение точности измерения и расширение функцио нальных возможностей« Поставленная цепь достигается тем что в устройстве для преобразования параметров вращакярссся деталей в электрический сигнал, содержащем резистивный датчик температуры, коммутатор, усилитель, враща.кщ(ийся конденсатор и блок памяти, коммутатор выполнен секционным и в устройство введены емкостный датчик крутящего MobiteHTa, опорный конденсатор, второй вращан щийся конденсатор, весовой сумматор, формирователь импульсов, неинвертирующий .i инвертирующий интеграторы, блок сравнения, выход которого соединен с входами инвертирующего интегратора и формирователя импульсов, с первым выходом первой секции коммутатора и первым управляющим входом, блока памяти, выход весового сумматора соединен с вторым выходом первой секции коммутатора и входом второй секции, первый выход которой соединен с инвертирующим входом блока сравнения и вторым выходом третьей секции коммутатора, суммирующий вход весового сумматора подсоединен к первому выходу третьей секции коммутатора, вычитающий вход - к входу четвертой секции коммутатора, весовой вход - к входу пятой секции коммутатора, опорный конденсатор одним выводом подключен к входу первой секции коммутатора, а другим - к входу усилителя, вход и выход которого соединены через вращающиеся, конденсаторы с параллельно включенными датчиками измеряемых параметров, выход усилителя подключен к первому выходу четвертой секции коммутатора и через блок памяти - к входу третьей секции коммутатора, выход инвертирующего интегратора подсоединен к неинвертирующему входу блока сравнения, а выход формирователя .импульсов - к второму выходу четвертой секции коммутатора, входу шестой секции, второй выход которой .соединен с вторым управляющим входом блока памяти, и через неинвертирукнций интегратор - к второму выходу пятой секции коммутатора. На фиг.1 представлена схема предлагаемого устройства; на фиг. 2 временные диаграммы его работы. Устройство для преобразования параметров вращающихся деталей в электрический сигнал содержит опор- ньй конденсатор 1, первый вращающийся конденсатор 2, усилитель 3, емкостный датчик 4 крутящего момента, резистивный датчик 5 температуры, второй вращающийся конденсатор 6, блок 7 памяти, коммутатор 8, весовой сумматор 9, неинвертирующий интегратор to, блок 11 сравнения, интегрирукмций интегратор 12 и формирователь 13 импульсов. Датчик 4 и 5 соединены междусобой параллельно и через вращающиеся конденсаторы 2 и 6 соединены соот3ветственно с входом и выходом усртителя 3, выход которого подключен к первому выходу четвертой секции коммутатора 8 и через блок памяти .7 к входу третьей секции коммутатора. Суммирующий, вычитающий и.весовой входы сумматора 9 подсоединены соответственно к первому выходу третьей секции, входам четвертой и пятой сек ций коммутатора 8. Выход сумматора.9 соединен с вторым выходом первой сек ции коммутатора 8 и входом второй секции, первый выход которой соедине с инвертирующим входом блока 11 срав нения и вторым выходом третьей секци коммутатора 8.. Выход блока 11 сравнения подключен через инвертирующий интегратор 12 к своему неинвертирующему входу, к первому управляющему входу блока 7 памяти, к входу формирователя 13 импульсов и к первому выходу первой секции коммутатора 8. Выход формирователя 13 импульсов подключен к второму выходу четвертой, секции коммутатора В, входу шеетой секции, второй выход.которой сое динен с вторым управляющим входом блока 7 памяти, и через неинввртирую щий интегратор 10 - к второму выходу пятой секции коммутатора 8. Вход пер вой секции коммутатора 8 через опорный конденсатор 1 подключен к входу усилителя 3. Устройство позволяет измерять кру тящий момент и температуру вращающих ся деталей благодаря применению датчиков емкостного и резистивного типов. В устройстве предусмотрено два режима работы, переключение которых осуществляется коммутатором 8. Рассмотрим работу устройства в режиме измерения крутящего момента, воспринимаемого емкостным датчиком 4 (режим с). В этом режиме входы каждой секции кo мyтaтopa 8 соединены с соответствующими первыми выходами . При переключении блока 11 сравнения на его выходе из-за наличия глубокой положительной обратной связи происходит скачкообразное изменение напряжения от значения +U(-U) к значению -и (+U). Пусть в момент времени t 0 имеет место положительный скачок напряжения. Это напряжение через коммутатор 8 подается на вход усилителя 3, напряжение на выходе которого описывается вьфажением 00 йгде t текущее время; GOемкость опорного конденсатора 1; емкости первого 2 и второго 6 вращакяцихся конденсаторов Соответственно; Ry- сопротивление резистивного датчика 5; емкость датчика 4 крутящего момента. Соответственно в начальный момент времени при t О имеем и,(|5...2Ы - (2) Ь 2 -Х / Напряжение U фиксируется блоком.7 памяти при каждом переключении блока 11 сравнения. По истечении интеразала времени, достаточного для затухания составляющей напряжения, описываемой вторым слагаемым в выражении (1) при t2 (5-6)R)(Cx можно считать, что С. С, . U) t7xt2 -U Напряжения с усилителя 3 и блока 7 амяти подаются соответственно на выитающий и суммирующий входы суммаора 9, на выходе которого в момент t ,j получаем ремени t |U9ft t,2Uc Указанное напряжение подается на. нвертирующий вход блока 11 сравнеия, на неинвертирующий вход которого оступает напряжение с инвертируюего интегратора 12, описываемоеыражениеми,,-и де V - постоянная времени инвертирующего интегратора 12. В момент равенства напряжений на ходах блока 11, т.е. когда С„ -U --2U: -I л . ыходное напряжение блока 11 скачкобразно изменяет полярность и весь роцесс повторяется аналогично расмотренному, но с противоположными наками. Период генерируемых колеЬа-ИИ определяется из выражения (6) .
.
(7)
: е -Из (7)
следует, что частота колебаНИИt прямо-пропорциональна значению емдатчика 4 крутящего момента кости С Рассмотрим работу устройства при измерении температуры вращающихся деталей, воспринимаемой р.езистивным датчиком 5 (режим R). В этом режиме входы калвдой секции коммутатора 8 соединены с соответствующими вторыми выходами. При переключении блока 11 срав-. нения на его выходе устанавливается напряжение амплитудой U. Одновременно формирователь 13 импульсов формирует импульсы амплитудой U и длительностью ьд , которые подаются неинвертирующий интегратор 10. В результате напряжение на выходе этого интегратора изменяется по закону U.. U, t - текущее время;. 30 постоянная времени неинвертирующего интегратора 10. Напряжения с выходов формирователя 13 и интегратора 10 поступают на входы весового сумматора 9. Весовые - коэффициенты суммирования имеют при; этом значения -1 и -fj/fo соответственно. Сигнал треугольной формы с выхода сумматора 9 длительностью описываемый выражением40 UB-UO JOпоступает на вход усилителя 3, на выходе которого имеем
(11)
, Это на11ряжение по команде блока 11 сравнения с задержкой на D, ,осу ществляемой формирователем 13, .фиксируется в блоке 7 памяти. Выходное напряжение блока 7 подается на инвертирующий вход блока 11 сравнения, нанеинвертирующий вход которого поступает напряжение интегратора :описываемое выражением (5). В момент равенства напряжений на входах.блока 11, т.е. когда и -.,. выходное напряжение блока сравнения скачкообразно меняет полярность на; противоположную и весь процесс повторяется аналогично рассмотренному, но с противоположными знаками. Период генерируемых колебаний определяется вьфажением (12) и с учетом UQ U составляет ,C,R Использование изобретения позволя:ет повысить точность измерения тем.пературы вращающихся деталей путем исключения влияния непостоянства значений емкости вращаюищхся конденсаторов и дополнительной погрешности, обусловленной неидеальностью параметров вращающегося трансформатора. Кроме того, расширяют функциональные возможности устройства за счет измерения крутящего момента.
СГ
См

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования параметров вращающегося объекта в электрический сигнал | 1985 |
|
SU1290099A1 |
| Устройство для определения напряжения прямой и обратной последовательностей | 1987 |
|
SU1478161A1 |
| ФАЗОВРАЩАТЕЛЬ СИГНАЛА ТРЕУГОЛЬНОЙ ФОРМЫ | 2015 |
|
RU2568771C1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Устройство электропитания с компенсацией искажений токов и напряжений системы электропитания | 1987 |
|
SU1576979A1 |
| Генератор сигналов для формирования управляющих токов доменной памяти | 1989 |
|
SU1725255A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВУХПОЛЮСНИКОВ | 2014 |
|
RU2575626C1 |
| Устройство для измерения и контроля технологических параметров | 1983 |
|
SU1136116A1 |
| РЕЗОНАНСНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ | 1993 |
|
RU2072619C1 |
| Цифровой измеритель температуры | 1985 |
|
SU1303849A1 |
УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ПАРАМЕТРОВ ВРАЩАЩИХСЯ ДЕТАЛЕЙ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ, содержащее резистивный датчик температуры, коммутатор, усилитель, вращающийся конденсатор и блок памяти, о т л и .чающееся тем, что, с целью повышения точности измерения и распирения функциональных возможностей,, коммутатор вьшолнен секционным и & устройство введены емкостный датчик крутящего момента, опорный конденсатор, второй вращающийся конденсатор, весовой сумматор, формирователь импульсов, неинвертирующий и инвертирующий интеграторы, блок сравнения, выход которого соединен с входами инвертирующего интегратора и формирователя импульсов, с первым выходом первой секции коммутатора и первым управляющим входом блока памяти, выход весового сумматора соединен с ; вторым выходом первой секции коммутатора и входом второй секхдаи, первый . выход которой соединен с инвертирующим входом блока сравнения и вторым выходом третьей секции коммутатора, суммирующий вход весового сумматора подсоединен к первому выходу третьей секции коммутатора, вычитающий вход к входу четвертой секции- коммутатора, весовой вход - к входу пятой ; секции коммутатора, опорньм конденсатор одним выводом подключен к входу § первой секции коммутатора, а другим к входу усилителя, вход и выход ко(Л торого соединены через вращающиеся конденсаторы с параллельно включенными датчиками измеряемых парамет- : ров, выход усилителя подключен к первому выхоДу четвертой секции коммутатора и через блок памяти - к входу третьей секции коммутатора, выход инвертирующего интегратора подсоединен к неинвертирующему входу блока сравнения, а выход формирователя импульсов - к второму выходу четвертой секции коммутатора, входу шестой секции, второй выход которой соединен с вторЬ1м управляющим входом блока памяти, и. через неинвертирующий интегратор г - к второму выходу пятой секции коммутатора.
CD
+ I i;.
Т1О Л
со
tJA
т
л
см
Cki
(ч
Ч
С
.
РежиМС
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для бесконтактного измерения параметров вращающихся деталей машин | 1976 |
|
SU601580A2 |
| G 0.1 К 13/08, 1976 (прототип)J | |||
