Изобретение касается механического устройства для автоматической компенсации радиодевиации радиопеленгаторов, используемых на судах с резко меняющейся осадкой и на кораблях, пеленгующих станции по всему диапазону частот радиопеленгатора, с компенсацией радиодевиации в зависимости от двух переменных величин - курсового угла и осадки судна или курсового угла и частоты приемника пеленгатора.
Известные механические компенсаторы радиодевиации обеспечивают компенсацию ее как функцию одной переменной. Другие переменные величины, как осадка судна или частота радиопеленгатора, полагаются постоянными. Подобное допущение может быть справедливым при соблюдении двух условий, во-первых, если осадка судна меняется в таких пределах, что вызванное ею изменение величины коэффициента радиодевиации Д не даст изменения остаточной радиодевиации, выходящего по своей величине за допустимое расхождение остаточной радиодевиации, наблюдаемой и табличной; во-вторых, если полоса частот, охватываемая диапазоном радиомаяка, не столь велика, чтобы давать заметные величины изменения радиодевиации с изменением частоты пеленгуемой станции, т. е. радиомаяка, в пределах этого диапазона.
Известные устройства компенсаторов радиодевиации не удовлетворяют двум этим условиям. Для грузовых судов, особенно танкеров, первое условие невыполнимо, и радиопеленгатором можно пользоваться лищь случае, когда осадка судна равна или близка к осадке, при которой производилось определение остаточной радиодевиации. Для кораблей, нуждающихся в пеленговании радиостанций, частота которых далека от диапазона радиомаяков, но охватывает диапазон прнемпика радиопеленгатора, невыполнимо второе условие.
Предложенное устройство устраняет недостатки известных устройств и отличается новым конструктивным выполнением механичеN° 112966
ской связи датчиков двух переменных с указателем, дающим возможность выдать остаточную радиодевиацию и получать пеленг.
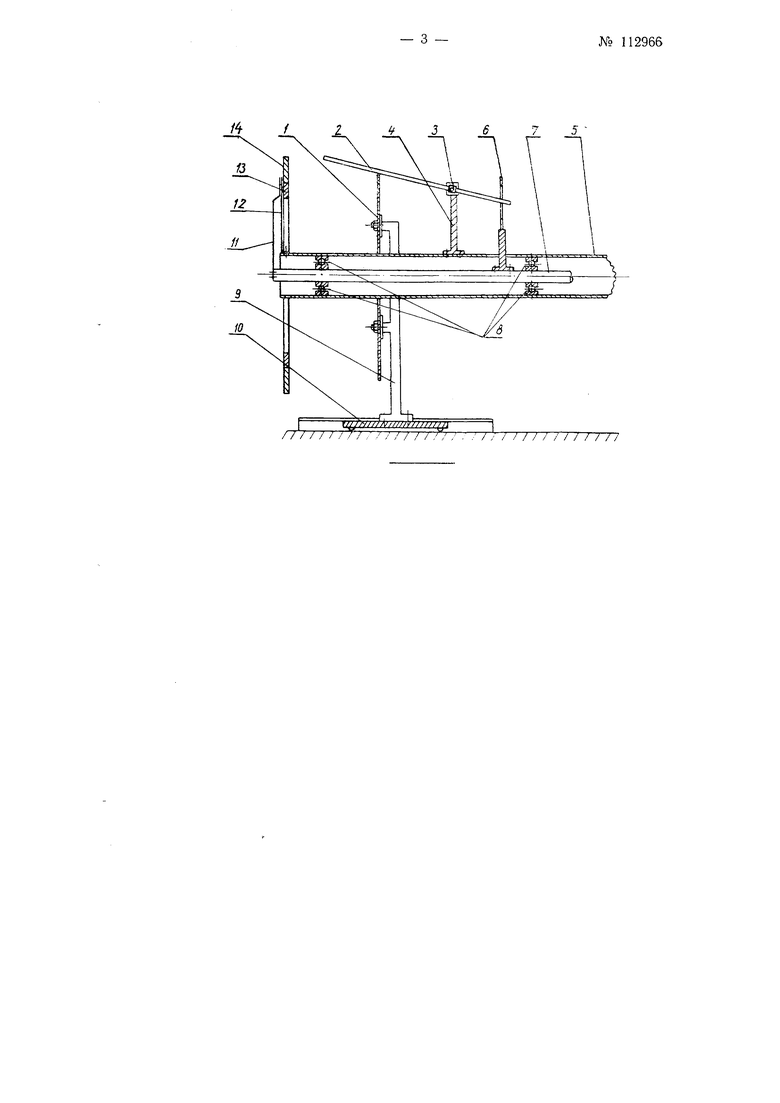
На схематическом чертеже изображен предлагаемый компенсатор. По его лекальному диску 1, которому придана форма, соответствующая данным таблицы остаточной радиодевиации, скользит щток-ползун 2, монтированный посредством шарнира 3 на стойке 4 так, что он может обегать весь контур лекального диска при вращении трубчатой оси 5. Прижим щтока-ползуна к лекальному диску обеспечивается пружиной (на чертеже не изображена). Противоположный конец штока-ползуна входит в наклонную прорезь стойки 6, закренленной на оси 7, монтированной внутри трубчатой оси посредством шарикоподшиппиков 8. Разворот оси 7 относительно оси 5 происходит в ту и другую сторону в зависимости от положения штока-ползупа 2 на лекальном диске, т. е. в зависимости от радиокурсового угла. Для компенсации радиодевиации не только как функции радиокурсового угла, а и еще одной переменной, лекальный диск укреплен на стойке 9 подвижной каретки 10, перемешающейся вдоль оси гониометра. Если каретку перемещать пропорционально изменению коэффициента Д, то стрелка // указателя, скрепленная с осью 7, будет указывать радиокурсовой угол, исправленный радиодевиацией для данной осадки или частоты. Когда каретка 10 перемещается пропорционально изменению того или иного коэффциента радиодевиации от частоты, то механическая передача от органов настройки радионриемника пеленгатора включает в себя механический дифференциал, дающий возможность перемещать каретку скачками от переключателя поддиапазонов и плавно - внутри каждого поддиапазона от рукоятки настройки приемника. Лекальный диск имеет разбивку по радиокурсовым углам в виде радиусов по концам и по величине и знаку радиодевиации-в виде концентрических окружностей. Обе оси имеют указатели, выполненные в форме стрелок // и 12. Лимб 13 соединен с датчиком гироскопа, а лимб 14 имеет шкалу радиокурсовых углов.
Предмет изобретения
1.Механическое устройство для комненсации радиодевиации радиопеленгаторов как функции двух переменных с использованием механически связанного с указателем щтока-ползуна, катящегося одним концом по лекальному диску, имеющ,ему очертание по закону радиодевиации в зависимости от курсового угла, отличающееся тем, что, с целью создания возможности наблюдать остаточную радиодевиацию, механическая связь указателя с датчиками выполнена в виде двух осей, вставленных одна в другую, одна из которых, трубчатая, связана с ротором гониометра и имеет стрелку, указывающую нескомпенсированный радиокурсовой угол, а вторая имеет стрелку, указывающую скомпенсированный угол, связанных между собой штоком-ползуном, шарнирно закрепленным на трубчатой оси с помощью стойки и одним концом, входящим в фигурную прорезь в стойке, закрепленной на внутренней оси в соответствующей прорези наружной оси, а вторым концом, катящимся по свободно насаженному на оси лекальному диску, укрепленному на подвижной каретке, перемещаемой вдоль осей по закону изменения второй переменной.
2.Устройство но п. 1, о тл и ч а ю щс е с я тем, что, с целью получения пеленга, его лимб соединен с датчиком гирокомпаса, сообщающим лимбу угловое смещение
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР СИГНАЛОВ РАДИОМАЯКА ДЛЯ ОПРЕДЕЛЕНИЯ ДЕВИАЦИИ РАДИОПЕЛЕНГАТОРА | 1990 |
|
RU2018857C1 |
| КОРАБЕЛЬНЫЙ ПЕЛЕНГАТОР БОГОМАЗОВА | 1992 |
|
RU2111502C1 |
| Устройство для компенсации девиации радиопеленгатора | 1941 |
|
SU63545A1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1998 |
|
RU2199472C2 |
| Устройство для определения глубинычЕРпАНия дРАжНОгО зАбОя | 1979 |
|
SU804768A1 |
| Прибор для обучения летчиков и штурманов визуальной ориентировке и компасной навигации | 1947 |
|
SU88001A1 |
| Курсоуказатель Бердяева | 1985 |
|
SU1276906A1 |
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ | 2009 |
|
RU2408404C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |