Изобретение относится к области навигационных систем с использованием излучения и изменения магнитной составляющей электромагнитных волн и может быть применено для точной и в автоматическом режиме посадки воздушных судов на взлетно-посадочную полосу (ВПП).
Известные способы посадки судов основаны на измерении излучаемых источниками электромагнитных волн и их отраженных составляющих для определения высоты и скорости снижения, для формирования в пространстве линий курса и глиссады планирования судна [1].
В настоящее время используется несколько радиомаячных систем посадки: отечественные СП-50, СП-68, СП-70, СП-75, СП-90 и международная JLS. В состав системы JLS входят три маркерных, курсовой и глиссадный радиомаяки.
Недостатками современных способов посадки воздушных судов на ВПП, основанных на приеме и измерении высокочастотных электромагнитных полей, являются: искажение волнового процесса в ближней области, что приводит к резкому увеличению погрешности определения координат судна в верхнем полупространстве по отношению к ВПП; из-за дискретного расположения маркерных радиомаяков появляется некоторая неопределенность в определении дальности до торца ВПП при нахождении воздушного судна в промежутке между радиомаяками. Увеличение погрешности измерения координат судна, его высоты и связи этих параметров со скоростью воздушного судна приводят к необходимости визуальной (слепой) посадки.
Использование магнитного поля для точной посадки судов требует специального способа его создания, предусматривающего значение магнитной индукции, направления векторов, частоты, градиента.
В работе [2] рассмотрен способ точной посадки с использованием индукции магнитного поля, задаваемого проводником с током, проложенным по центру вдоль ВПП. Этот способ доказывает только принципиальную возможность использования в аэронавигации.
Наиболее близким аналогом является система, которая содержит электрические проводники, проложенные от зоны руления до площади погрузки и выгрузки (посадки и высадки). Электрические проводники создают магнитное поле, которое принимается бортовой системой, определяющей направление движения самолета по траектории прокладки электрического проводника [3].
Достоинством такой системы является ее простота по сравнению с существующими навигационными системами. Однако она не может быть использована для обеспечения надежной посадки воздушных судов, так как не обеспечивает координат судна относительно ВПП в верхнем полупространстве, скорости, снижения, высоты полета.
Целью изобретения является повышение точности посадки воздушного судна. Эта цель достигается тем, что вдоль образующих линий ВПП прокладывают в горизонтальной плоскости (XZ) большой замкнутый электропроводящий контур, соединяют его через источник переменного тока с частотой ω1 электрическим проводником, проложенным вдоль осевой линии ВПП (компонента Z). Током источника создают магнитное поле, при этом компонента X в горизонтальной плоскости, перпендикулярная осевой линии ВПП, имеет максимум над осевой линией. Вертикальная составляющая вектора магнитного поля (компонента Y) проходит через нуль в плоскости YZ. Внутри большого контура прокладывают в горизонтальной плоскости малый электропроводящий контур и подключают его к генератору тока с частотой ω2. Проводники контуров прокладывают на определенном расстоянии от боковых и торцевых линий ВПП. Измеряют значения векторов магнитных полей с частотами ω1,ω2 бортовыми компонентными магнитометрами воздушного судна, определяют курс, высоту полета до момента касания с ВПП и дальность воздушного судна до торца ВПП с помощью бортовой ЭВМ и производят точную посадку воздушного судна.
Для создания переменного магнитного поля в окрестности аэродрома служат два источника поля ИП1 и ИП2. ИП1 состоит из семи прямолинейных проводников П1-П7 лежащих в горизонтальной плоскости XZ (фиг.1). Питание ИП1 осуществляется от генератора колебаний Г1, работающего на частоте ω1. Аналогично, ИП2 состоит из четырех прямолинейных проводников П8-П11, питаемых от генератора Г2, работающего на частоте ω2.
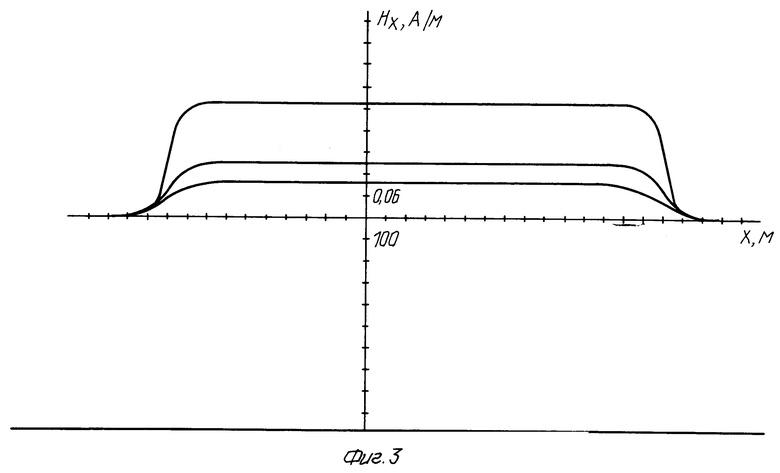
С помощью поля ИП1 движение воздушного судна стабилизируется таким образом, чтобы проекция его траектории на плоскость XZ лежала на оси O. Для этого используются как горизонтальные (Нх и Нz), так и вертикальная (Ну) компоненты вектора напряженности магнитного поля  Кроме того, амплитуда Нх служит для непрерывного вычисления высоты полета y воздушного судна.
Кроме того, амплитуда Нх служит для непрерывного вычисления высоты полета y воздушного судна.
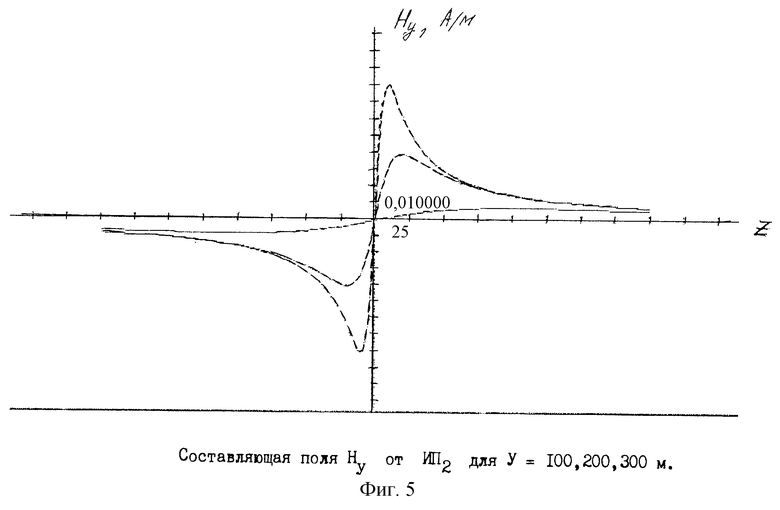
Магнитное поле ИП2, представляющего собой плоскую прямоугольную рамку, служит для определения дальности воздушного судна.
Начало используемой прямоугольной системы координат ОХУZ выбрано на некотором удалении от торца и вглубь ВПП, причем осевая линия ВПП совпадает с осью ОZ. Проводники П5, П6, П7, П10 и П11 параллельны оси ОZ, и проводники П1, П2, П3, П4, П9 и П8 параллельны оси ОХ.
Вычисления магнитных полей от возбуждаемых ИП1 и ИП2 целесообразно производить для случая низких частот, когда влиянием электромагнитных свойств нижнего полупространства можно пренебречь.
Согласно закону Био-Савара-Лапласа каждый элемент проводника длиной dl с током I создает в произвольной точке А (фиг.1) напряженность магнитного поля, которую можно рассчитать по формуле
где  - вектор элемента проводника с модулем dl, проведенный в направлении тока;
- вектор элемента проводника с модулем dl, проведенный в направлении тока;  - радиус-вектор, проведенный из этого элемента тока в точку А. Вектор
- радиус-вектор, проведенный из этого элемента тока в точку А. Вектор  перпендикулярен плоскости, в которой лежат
перпендикулярен плоскости, в которой лежат 
Интегрированием уравнения (1) по длине проводников, указанных на фиг.1 для указанного на этой же фигуре мгновенного направления тока, можно найти значения компонент вектора напряженности магнитного поля в произвольной точке А, расположенной в верхнем полупространстве (для краткости все промежуточные вычисления опущены).
Таким образом, суммарное магнитное поле от ИП1 в точке А по компонентам:
Hx=Hx5+Hx6+Hx7,
Hy=Hy1+Hy2+Hy3+Hy4+Hy5+Hy6+Hy7, (2)
Hz=Hz1+Hz2+Hz3+Hz4.
Если воздушное судно над осью OZ (точка Р, фиг.1), то магнитные поля проводников П1, П2 и П3, П4 взаимно компенсируются и тогда имеем более простую картину:
Hy=Hy5+Hy6+Hy7, (3)
Hz=0.
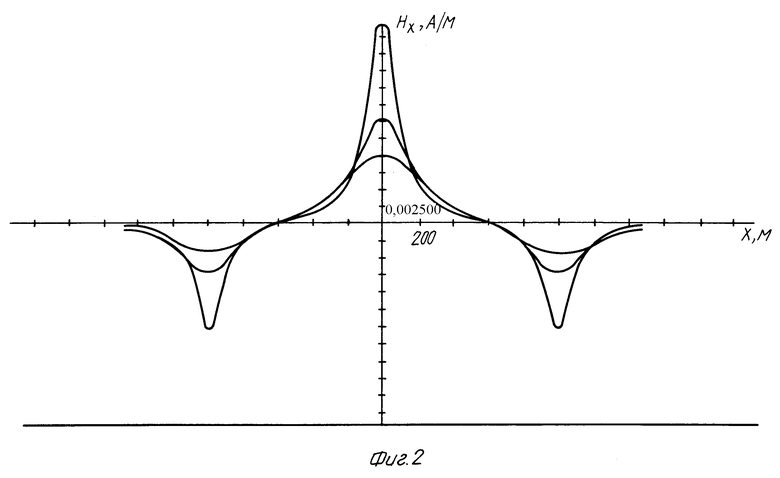
На фиг.2 изображено поле в плоскости ХУ, а на фиг.3 - в плоскости УZ. В первом случае z=500 м, что соответствует равному удалению от концов проводников. Во всех случаях для расчета измерения полей использованы следующие значения параметров уравнений: l=1000 м; b=2000 м; d=3000 м; I1=I2=10 А.
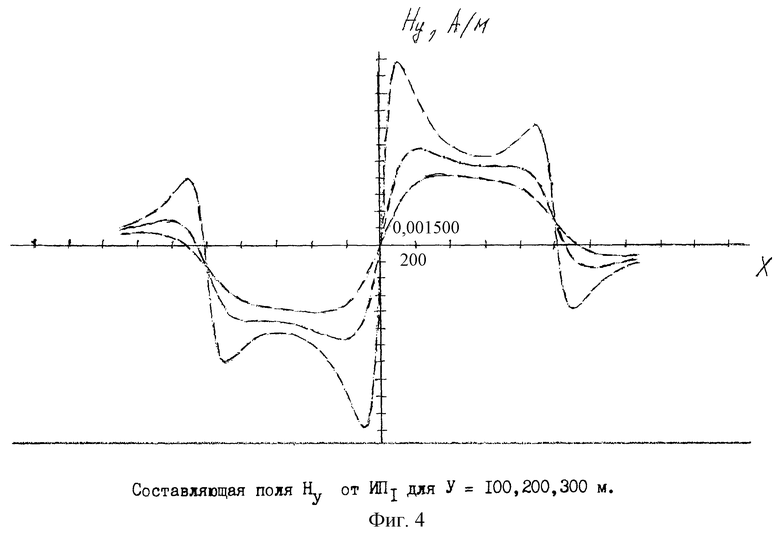
На фиг. 4 показано сечение суммарного поля от проводников П5, П6 и П7 в плоскости ХУ, проходящей через точку z=500 м. Эта составляющая меняет знак при переходе через плоскость YZ и характеризуется большим значением производной dH/dx при небольших x. Напряженность магнитного поля торцевых проводников П1-П4 быстро падает с приближением к плоскости УZ, в которой суммарное поле от этих проводников равно нулю, вследствие взаимной компенсации.
Для источника ИП2 магнитное поле отыскивается для случая x=0, т.е. в плоскости УZ (точка Р на фиг.1).
Суммарное поле от ИП2 в точке Р по компонентам:
Hy=Hy8+Hy9+Hy(10,11), (4)
Hz=Hz8+Hz9+Hz(10,11),
Hx=0.
Составляющая Нz от ИП2 на небольших и средних высотах y мала, поэтому для определения дальности наиболее пригодна составляющая Ну. На фиг.5 показана зависимость Ну от z для трех постоянных значений высоты полета y=100, 200 и 300 м.
Произведем оценку некоторых погрешностей. Пусть воздушное судно находится на заключительном этапе посадки перед касанием с ВПП, причем симметрично относительно проводника П6. Примем, что расстояние всех трех датчиков бортовых магнитометров [2] от ВПП y=3 м, а расстояние датчиков, расположенных на крыльях от плоскости Y, также равно 3 м. При токе 2I1=20 А амплитуда Нх на центральном датчике составит 1,062 А/м или 1,33•10-5 Тл (B = μ0H, μ0 = 4π•10-7Г/м),), а Ну=0. На боковых датчиках
Рассмотрим худший вариант, когда определение высоты полета производится с помощью датчика на крыле по компоненте Нх. Поскольку угловое разрешение датчика на каждой компоненте α=1'=0,0029 рад, то можно оценить паразитный сигнал ΔHx на Х-компоненте от составляющей Ну:
Величина ΔHx составляет 0,29% от Нх, что на высоте 3 м и приводит к погрешности определения высоты около ±1 см.
Для измеренного на крыле сигнала по Y-компоненте Нуи можно записать Hyи = H±ΔHy. Здесь ΔHy - погрешность, обусловленная тем, что Y-компонента датчика ориентирована под малым углом к вертикальной плоскости, проходящей через осевую линию самолета. Из-за влияния паразитного сигнала составляющей Нх можно записать Нуи=Ну±Нхtgα.
При Н=0,75 А/м, tgα=0,0029 рад |ΔHy| = 0,002 A/м.
Пусть амплитуда поля равна Но, тогда можно получить, что ,
,
отсюда
или
Здесь Δx - кажущееся смещение самолета относительно плоскости YZ от паразитного сигнала Н на Y-компонентe. Полагая снова, что Но=1,062 А/м, y=x= 3 м, найдем Δx ≃ 0,0023 м для α=1'. Если α=5', то Δх=0,0115 м.
Пусть расстояние от линии, соединяющей датчики на крыльях, до датчика на фюзеляже равно 5 м. Найдем угловую погрешность измерения курса β:
т. е. теоретически β перед касанием с ВПП может составлять менее 1'. Алгоритм выведения воздушного судна к ВПП предполагается заложить в программу бортовой ЭВM. Здесь отметим некоторые его позиции.
При заключительном этапе посадки, начиная с высоты порядка 100 м, производится прецизионное наведение судна на ВПП. Для этого непрерывно сравниваются сигналы Нх и Ну с датчиков, расположенных на крыльях и фюзеляже. Если судно движется точно вдоль осевой линии, то должны выполняться условия: Нхл= Нхп, Нхц > Нхл, Нхц > Нхп, Нул=-Нуп, Нуц=0, где буква л означает, что датчик находится на левом крыле (если смотреть по ходу движения судна), буква п относится к датчику, расположенному на правом крыле, а буква ц означает, что датчик находится в центре, симметрично по отношению к двум выше указанным датчикам.
Поскольку точки расположения всех трех датчиков на судне зафиксированы, то выполнение условий Нул=-Нуп, Нуц=0 означает жесткую стабилизацию направления полета судна точно вдоль осевой линии ВПП. Поле Н меняет знак при переходе через плоскость YZ (фиг.4). Поэтому по знакам сигналов, снимаемых с Y-компоненты датчиков, легко определяется, с какой стороны от плоскости YZ находится в данный момент датчик, а по амплитуде сигнала определяется его отклонение от плоскости YZ.
В отличиe от компоненты Ну Нх не меняет знак при переходе через плоскость YZ. Поэтому информацию о смещении судна дает только сравнение амплитуд на Х-компонентах датчиков. Достоинством Нх является то, что она имеет большую интенсивность по сравнению с Ну с ростом высоты. Так, на высоте около 50 м амплитуда Нх на порядок больше амплитуды Ну. Производные dHy/dHx и dHx/dx зависят от x, поэтому их непрерывное вычисление по текущим измерениям Ну и Нх на разных датчиках дает дополнительный канал информации о смещении судна при выполнении посадки.
Сигналы с Z-компоненты датчиков могут быть использованы при заходе на посадку. При подлете судна к аэродрому под некоторым углом к оси ОZ проекция траектории судна пересекает либо проводник П1, либо П2 (фиг.1). При этом Z-компоненты датчиков фиксируют сигнал полей этих проводников. Абсолютная величина сигнала будет плавно нарастать с приближением к проводнику и проходить максимум точно над проводником. Причем над проводниками П1 и П2 сигналы будут иметь противоположные знаки, и судно может определить, слева или справа от оси ОZ он приближается к ВПП. Точка прохождения максимума сигналов выполняет роль своеобразного маркера для предварительного определения расстояния до ВПП.
Пороговая чувствительность современных датчиков по переменному полю составляет 10-4 нТл, что позволяет уверенно регистрировать магнитные поля от ИП1 и ИП2 на расстояниях свыше 1 км. Так, при токе на ИП1 I=10 А, l=1 км составляющая индукция магнитного поля Bx = μ0Hx, используемая для определения высоты полета, на высоте 1 км составляет 2•10-9 Тл, что в 200000 раз превышает пороговую чувствительность датчика. Составляющая поля Ву от ИП2, используемая для определения дальности, при l=1000 м, b=2000 м, I2=10 А, y= 100 м на расстоянии 1 км от торца ВПП составляет 1,7•10-10 Тл, что в 17000 раз больше пороговой чувствительности датчика.
При низком пороге чувствительности датчиков имеется возможность увеличить измерения дальности и высоту судна относительно ВПП и уменьшить ток в системе проводников, а следовательно, мощность задающих генераторов Г1 и Г2.
Количество и точность поступающей на судно информации оказываются достаточными для того, чтобы с помощью имеющегося на судне вычислительного устройства спроектировать траекторию снижения и затем осуществить прецизионную посадку судна на ВПП. Из-за возможности полной автоматизации процесса посадки действие данной СП оказывается независимым от условий видимости на ВПП, что несомненно сулит большой положительный экономический и экологический эффект.
Расчеты показывают, что стоимость предлагаемой системы посадки и ее обслуживание на порядок меньше существующих СП.
Литература
1. В.В. Глухов и др. "Авиационное и радиоэлектронное оборудование летательных аппаратов", изд. Транспорт, 1983 г., 141 с.
2. Патент России 2095293, 1993 г.
3. Патент Франции 2007336, кл. В 64 F 1/00, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1993 |
|
RU2095293C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1997 |
|
RU2182367C2 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ СНИЖЕНИЯ ПРИ ПОСАДКЕ ВОЗДУШНОГО СУДНА В УСЛОВИЯХ ОТСУТСТВИЯ ВИЗУАЛЬНОЙ ВИДИМОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2016 |
|
RU2631264C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА МОНОФОТОННОЙ УФ-С ТЕХНОЛОГИИ ДЛЯ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ ВОЗДУШНОГО СУДНА | 2014 |
|
RU2564934C1 |
Изобретение относится к области аэронавигации с применением излучения магнитного поля и используется для точной посадки воздушных судов на взлетно-посадочную полосу (ВПП), для чего вдоль образующих линий ВПП прокладывают в горизонтальной плоскости большой замкнутый электропроводящий контур, соединяют его через источник переменного тока с частотой ω1 электрическим проводником, проложенным вдоль осевой линии ВПП. Внутри большого контура прокладывают малый электропроводящий контур и подключают его к источнику тока с частотой ω2. Проводники контуров прокладывают на определенном расстоянии от боковых и торцевых линий ВПП, создают напряженность магнитного поля с частотами ω1 и ω2 с заданной топографией, измеряют векторы магнитных полей бортовыми компонентными магнитометрами, определяют курс, дальность до торца ВПП и высоту воздушного судна с помощью бортового вычислительного устройства. Технический результат заключается в повышении точности автоматической посадки судна. 5 ил.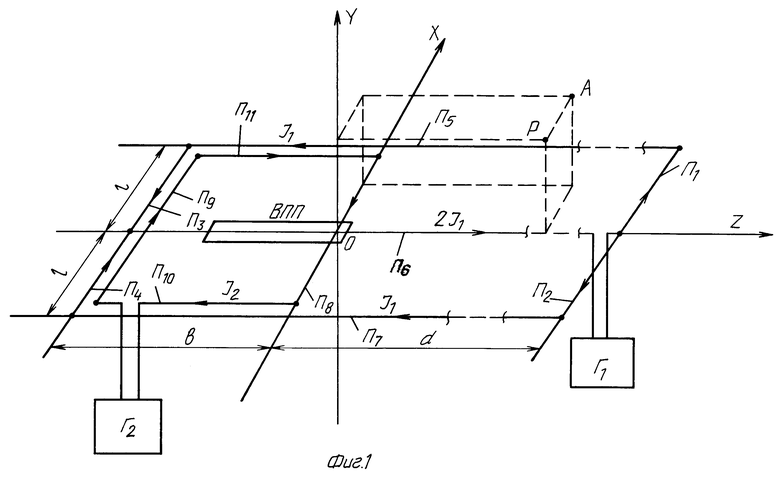
Способ точной посадки воздушных судов на взлетно-посадочную полосу (ВПП), включающий создание магнитного поля путем прокладывания систем наземных электрических проводников, измерение составляющих вектора магнитного поля измерителями, установленными на борту судна, отличающийся тем, что вдоль образующих линий ВПП прокладывают в горизонтальной плоскости большой замкнутый электропроводящий контур, соединяют его с источником переменного тока с частотой ω1 электрическим проводником, проложенным вдоль осевой линии ВПП, создают магнитное поле током источника, при этом компонента вектора в горизонтальной плоскости и перпендикулярная осевой линии ВПП имеет максимум над осевой линией, а вертикальная составляющая вектора магнитного поля проходит через нуль, внутри большого контура прокладывают в горизонтальной плоскости малый электропроводящий контур, подключают к источнику тока с частотой ω2, причем проводники контуров прокладывают на определенном расстоянии от торцевых и боковых линий ВПП, измеряют значения векторов магнитных полей с частотами ω1 и ω2 бортовыми компонентными магнитометрами, определяют курс, высоту и дальность воздушного судна до ВПП с помощью бортовой ЭВМ и производят точную посадку воздушного судна.
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1993 |
|
RU2095293C1 |
| КАРКАС ДЕЛЬТАПЛАНА ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1992 |
|
RU2007336C1 |
| Электромагнитный пускатель | 1988 |
|
SU1817149A1 |
| Устройство для формирования входных воздействий в системе программного контроля | 1980 |
|
SU920729A1 |
| СПОСОБ ДОБЫЧИ ПРИРОДНОГО ГАЗА В ОТКРЫТОМ МОРЕ | 2008 |
|
RU2393337C1 |

