д
(Л
4
оо /
4
сл
Л.
.О.
оо
Фиг.-f
Изобретение относится к легкой промышленности и может быть использовано при проектировании одежды различного назначения.
Известно устройство для определения величины максимального размаха рук человека, содержащее смонтированные на (кновании вертикальную раму, несущую эргонометрический щит со шкалами величин углоТзых перемещений рук, вертикальных и |оризонтальных отклонений туловища и головы человека, фиксаторы положения рук, ног и туловища, датчик положения низа изделия и регистрирующий ирибор 1.
Недостатком известного устройства является невозможность определения величины углов отклонения рук ю отношению к г ijMfiiiy фн перемещении рук в любом мгг-л Г .чиственном положении, а также ij; . -.-.,ч-иммстричных движениях рук, что СП .-,ж производительность при проекти1КИип;1м одежды.
Цсмь изобрете1 ия -- 110 5Ы пение произзоднтсльпостп.
Иостав.леннаи цель достигается тем, что Г: : ofCTBO :;:;;; определении чр1онометри iOvKiix оказ; Т(.лоп фигуры человека, содержащ.ч осмеивание с фиксатора.ми ноложения iV.it), ;(ог и )ук испытуе.мoio, средство j;Cii;-iH ио;1ожения объекта, соедипенчое ; ч iiCTjiaiopoM, имеет датчик ус;и по;11;к у руки, TeoiecKonHMCCKyio тягу, соедиi(/::(i( ОДНИМ КОНЦОМ С фиКСатОрОМ ЛАИ.
а другим -- с расположенной горизонта. осью датчика угла новорота руки, прпче:,: оба датчика жестко закреплены на осг10вани1Г а их осп взаимно иериеидикулярпь.
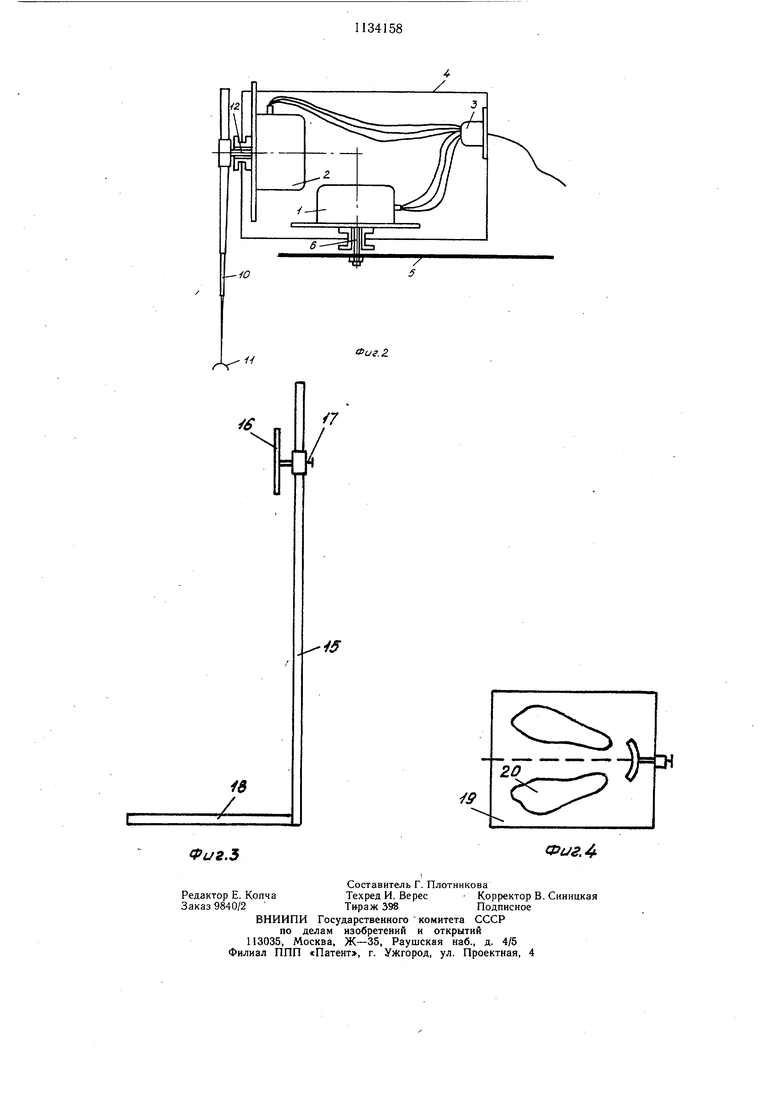
На фиг. 1 )ажено устройство, общий вид; на фиг. 2 --- корпус с измерительными нреобразователя.ми; на фиг. 3 - фиксатор по.южения ту.ловища; на фиг. 4 - фиксатор ноложения стоп йог.
Устройство д;1я определения эргопометричсских показателей фигуры человека содержит .л.за измерительных преобразоваГеля 1 2, соединенных нровода.ми с разъемо.м 3 и закрепленных взаимно перпендикулярно и ;;г;р1:усе 4, который установлен на гори;опта, пластине 5 и поворачивается в гог.:ик)птальной плоскости на оси 6 из.мерительного преобразователя 1. Пластина 5 с противовесом 7 закреплена гайкой 8 к штативу 9. Телескопический рычаг 10 с ремешком И на конце закреплен на оси 12 из.мерительного преобразователя 2 и пово5 рачивается на этой оси в вертикальной плоскости.
Разъем 3 соединен тонким гибким кабелем 13 с прибором 14, в котором величины угло.м отклонения рук преобразуются в
0 электрические напряжения. Фиксатор положения туловища 15 (фиг. 3) представляет собой стойку, несущую тонкую жесткую пластину 16 (ограничитель положения сиины человека), закрепленную на стойке регулировочным винто.м 17, снизу к стойке прикреплены площадка 18 фиксатора 19 положения ног. Фиксатор 19 положения ног (фиг. 4) состоит из горизонтального основа 1ия с нанесенными на него контурами стоп 20 гфи естественном спокойном поло0 жонии человека стоя.
Устройство работает следующим образом.
Человека в белье устанавливают на гюдставку фиксатора 19 ног (фаг. 4). Два штатива 9 устанавливают вертикально с
I
- пеооходимои высотой справа и слева фигуры челор5ека так, чтсбы ось поворота телескопического рычага 10 совпадала с центром вращепия плечевого сустава. Телескопический 1ычаг 10 выдвигают па н-еобходимук длииу .и закрепляют ремешком I у запястья руки. После включепия прибора в сеть устанавливают начальное положение отсчета углов. При изменении положения руки в вертикально.м направлении поворачивается телескопический рычаг 10 на оси
12 измерительпого преобразователя 2, и величины углов отклонений от исходного положения индицируются на цифровом табло прибора 14. При изменении положения руки в горизонтальном направлении, рычаг 10 поворачивает корпус 4 на оси 6 измерительного преобразователя 1, а величины углов отклонений от исходного положения также индицируются на цифро io:vi табло прибора 14, который имеет выход для подключепия стандартной регистрирующей аппаратуры.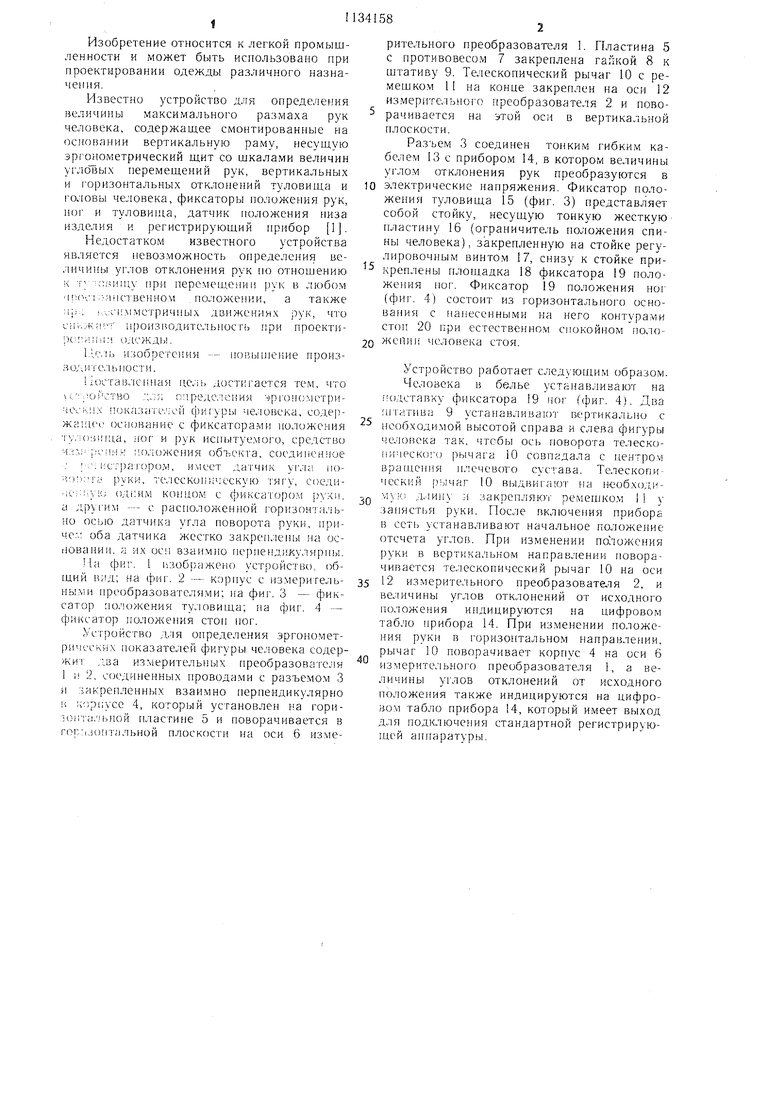
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения эргономических показателей качества конструкции плечевых швейных изделий на фигуре человека и устройство для осуществления способа | 1976 |
|
SU563961A1 |
| Способ определения эргономическихпОКАзАТЕлЕй КАчЕСТВА плЕчЕВыХшВЕйНыХ издЕлий и уСТРОйСТВО дляОСущЕСТВлЕНия СпОСОбА | 1979 |
|
SU820790A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2006 |
|
RU2319217C1 |
| ОРТЕЗНАЯ СИСТЕМА | 2020 |
|
RU2753801C1 |
| Тренажер для борцов | 1989 |
|
SU1724283A1 |
| Способ определения эргономических показателей качества конструкции швейных изделий и устройство для осуществления способа | 1978 |
|
SU745486A1 |
| Устройство для измерений силы мышц и амплитуды движений руки человека | 1983 |
|
SU1175433A1 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| Опорная стойка для специального снаряжения | 2019 |
|
RU2707331C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2000 |
|
RU2178720C1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭРГОНОМЕТРИЧЕСКИХ ПОКАЗАТЕЛЕЙ ФИГУРЫ ЧЕЛОВЕКА, содержащее основание с фиксаторами положения туловища, нос и руки испытуемого, средство измерения положения объекта, соединенное с регистратором, отличающееся тем, что, с целью повыщения производите.яьности путем определения пространственного перемещения руки человека одновременно в двух плоскостях, оно имеет датчик угла поворота руки, телескопическую тягу, соединенную одним концом с фиксатором руки, а другим - с расположенной горизонтально осью датчика угла поворота руки, причем оба датчика жестко закреплены на основании, а их оси взаимно перпендикулярны.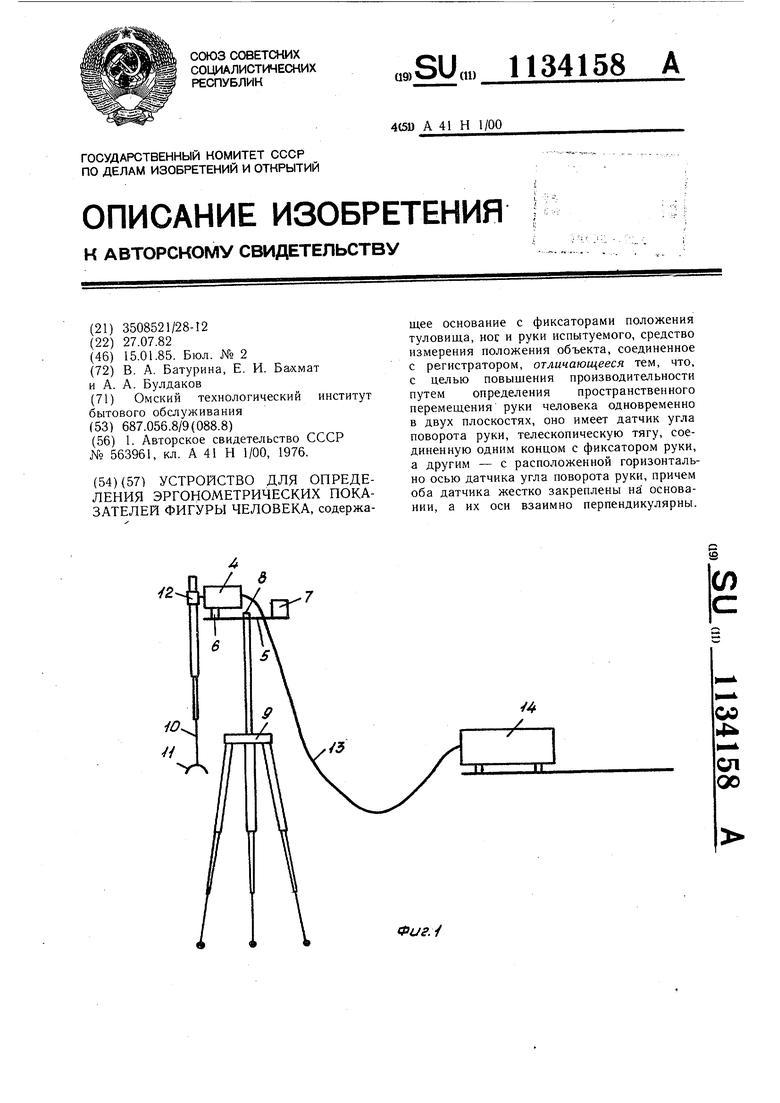
/7
/
M
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения эргономических показателей качества конструкции плечевых швейных изделий на фигуре человека и устройство для осуществления способа | 1976 |
|
SU563961A1 |
| Механический грохот | 1922 |
|
SU41A1 |
