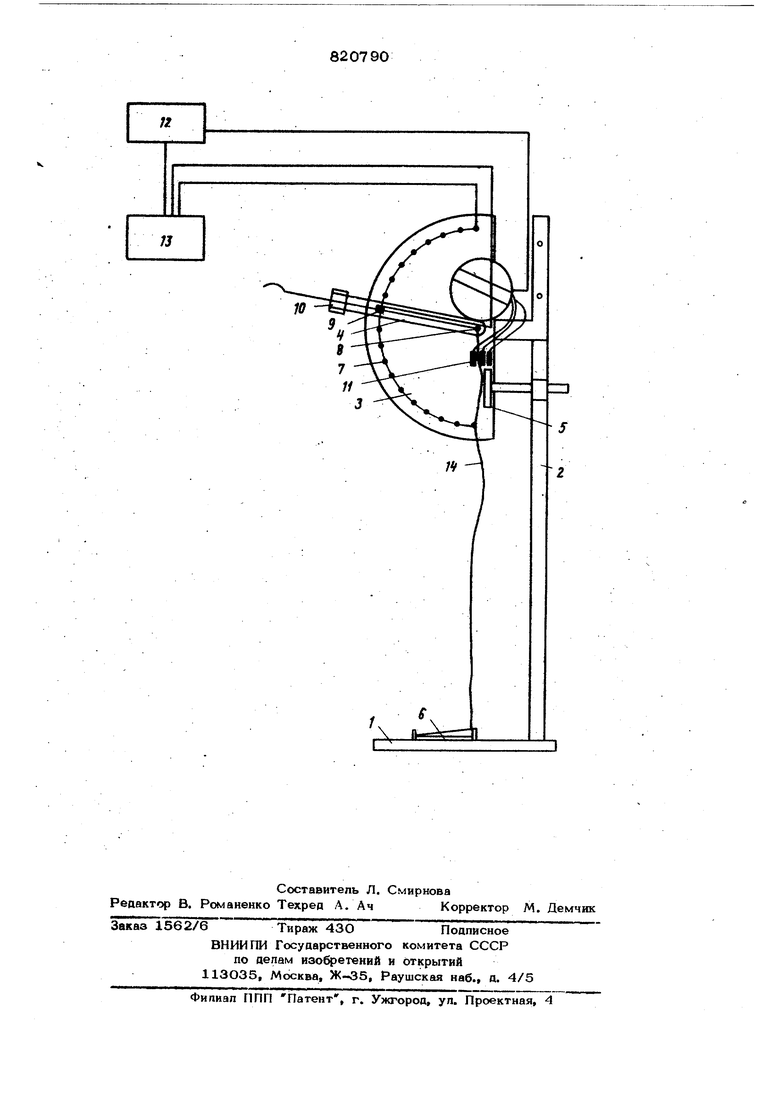
(54) СПОСОБ ОПРЕДЕЛЕ КАЧЕСТВА ПЛЕЧ И ycTPCrficTBO Изобретение относится к легкой промышленности и может быть испольговано в швейной и трикотажной отраслях для сиеики качества ооежоы. по эргономическим показателям динамического соответствия. Известен способ определения эргономи ческих показателей качества конструкции плечевых швейных изделий на фигуре человека и устройство для его осуществления, согласно которому определяют величины максимального размаха рук человека с изделием и без него и с последующим определением соотношения соответствующих величин размаха и величины перемещения низа изделия на урсжне боковых швов при подъеме рук до горнзонталь ного положения относительно исходного положения изделия на фигуре -человека с последующей оценкой качества. Известный способ осуществляется на устройстве, содержащем монтированную на основании вертикальную раму, несущую регулируемый по высоте сегмент со шка- СП ЭРГОНОМИЧЕСКИХ ПОКАЗАТЕЛЕЙ Х ШВЕЙНЫХ ИЗДЕЛИЙ я ОСУШЕСТВЛЕНИЛ БА лой величин угловых перемешсиий рук, фикс1агоры положения рук, туловииш и ног и регистрирующий прибор l. Недостатком известного способа является то, что эргономические показатели характеризуют только внешнее динамическоесоответствие одежды фигуре человека в динамике и не дают обьективной оценки о состоянии организма человека в одежде, т.е. о внутреннем динамическом соответствии одежды фигуре человека. Цель изобретения - более объективная оценка качества изделия. Поставленная цель достигается тем, что -согласно способу, заключающемуся в определении угла размаха рук человека с изделием с последующей оценкой качества, одновременно с размахом рук человека определяют величину давления изделия на опорные плечевые участки в местах возникновения, максимальных давлений на спине и руке, а оценку качества определяют по величине максимального давления. 38 Величину максимального аавления на опорный плечевой участок определяют по формуле - критерий внутреннего динамического соответствия; 1 максимально допустимая величина давления (ЗООО-З5007 } - среднеарифметическая величина давления на опорных плечевых участках при определенной величине угла размаха рук. Предлагаемый способ осуществляется тем, что устройство, содержащее монтированную на основании вертикальную раму несущую регулируемый по высоте сегмент со шкалой величин угловых перемещений рук, фиксаторы положения рук, туловища и ног, и регистрирующий прибор, имеет датчики давления, установленные на изделии С изнаночной стороны на спинке и рукаве, сбязанпые с регистрирующим прибором посредством усилителя сигналов, а сегмент имеет контакты расположенные по дуге окружности с определенным интервалом углов, фиксатор рук выполнен в виде установленного в центре сегмента рычага с электрическим контактом и ско- бой для охвата запястья руки человека. На чертеже схематически изображено предлагаемое устройство, общий вид. Устройство состоит из монтированной на основании 1 вертикальной рамы 2, несущей сегмент 3 со шкалой величин угловых перемещений рук, фиксатор 4 положения руки, фиксаторы 5 и 6 положения туловища и ног. Сегмент 3 выполнен с возможностью регулирования по высоте относительно вертикальной рамы 2. На сегменте 3 вмонтированы по дуге окружности с определенным интервалом величи углов неподвижные контакты 7 датчика. Центр 8 сегмента 3 совпадает с центром вращения плечевого сустава. К центру 8 сегмента 3 крепится поворотный рычагфиксатор 4 положения руки, на котором расположен электрический контакт 9 дат чика и скоба 1О для охвата запястья рук Средство для измерения абсолютной вели чины давления изделия на тело человека состоит из тензометрических датчиков 1 давления которые установлены на издепи с изнаночной стороны на спинке и рукаве и св 1заны с усилителем 12 сигналов и многокаиальным самопищущим быстродействую1иим прибором 13. 04. Фиксатор 5 положения туловища выполнен в виде пластины, монтированной на вертикальной стойке 2 на уровне выступающих точек лопаток перпендикулярно положению сегмента 3. Фиксатор 6 положения стоп выполнен на основании 1 в виае контуров подошвы обуви при естественном вертикальном положении человека. Предлагаемый способ осуществляется следующим образом. Ла изделие с изнаночной стороны прикрепляют тензометрические датчики 11 давления в местах возникновения максиального давления на спинке и рукаве в области проймы на уровне задних углов поцмыщечной впадины. На испытуемого 14 одевают изделие с прикрепленными к нему датчиками 11 давления. Затем испытуемого 14,устанавливают на фиксатор 6стоп, расположенный на основании 1 так, чтобы выступающие точки лопаток касались фиксатора 5 положения туловища, а центр вращения ппечввых суставов совпадал с центром 8 сегмента 3. При этом скоба 10 фиксатора 4 рук охватывает запястье правой руки. Человек стоит прямо, без напряжения, сохраняя привычную осанку, руки свободно опущены вниз. Положение фиксатора 4 рук соответствует положению продольной оси ппеча свободно опущенной руки человека. Затем испытуемый 14 выполняет подъем рук вперед-вверх до 180°. Одновременно с подъемом рук осуществляется подъем фиксатора 4 рук, при этом подвижный контакт 9 датчика последовательно замыкается с неподвижными контактами 7датчика в точках фиксации величин углов размаха рук, расположенных на сегменте 3 от О до 18О с интервалом 10 (или с любым другим). Вследствие этого возникает сигнал, который передается на левый отметчик масопищущего прибора 13 и фиксируется на диаграмме. Параллельно с этим производится и регистрация абсолютных величин аавления изделия на тело человека, что осуществляется посредством тензометри- ческих датчиков 11 давления, укрепленных на изделии с изнаночной стороны. Сигнал с тензометрических датчиков 11 давления поступает через усилитель 12 на самопишущий прибор 13. Таким образом, на диаграмме самопишущего прибора одновременно фиксируются величина угла размаха рук человека с изделием и абсолютные величины давлений изделия на тело человека. Вычиспение величины максимального аавления изделия на опорные плечевые участки изцелия осуществляется по фор- мупе К -Р Ai-pT , Таким образом, предлагаемые способ и устройсп о позволяют изучать динамику изменения давления оцежды на тело чело века в завнсимости от углов размаха рук, а также определять заданные дискретные значения давления при подъеме рук на оп ределенный заданный угол, что повышает объективность оценки эргономических по казателей качества одежды в динамике, так как одновременное измерение и оценка показателей уровня давления и размаха движений рук человека позволянэт непосредственно характеризовать функциональные возможности и комфортное состо яние организма человека и оптимизироват конструктивные параметры одеждъ по эргономическим показатетшм внутреннего и внешнего динамического соответствия. Формула изобретения 1. Способ определения эргономических показателей качества плечевых швейных изделий путем определения угла размаха рук человека с изделием с последующей (щенкой качества, отличаюшийс я тем, что, с целью более объективной оценки качества изделия при его эксплуатации, одновременно с размахом рук человека с изделием определяют величину давления изделия на опорный плечевой участок в местах возникновения максимальных давлений на спине и руке, а шенку качества определяют по величине максимального давления, 2. Способ по п 1, о т л и ч а ю ш и и с я тем, что определяют величину максимального давления на опорные плечевые участки по формуле Р где Х - критерий внутреннего айнамичоского соответствия; Р - максимально допустимая величина давления (ЗООО-3500д) Р - среднеарифметическая велнчвна давления на опорных плечевых участках при определенной величине угла размаха рук. 3. Устройство для осуществления способа по п. 1, содержащее монтирсжанную на оснсюании вертикальную раму, несущую регулируемый по высоте сегмент со шкалой величин угловых перемещений рук, фиксаторы положения рук, туловища и ног и регистрирующий прибор, отлнч ающ е е с я тем, что оно имеет датчясв давления изделия, установленные на изделии с изнаночной стороны на спинке и fyкаве и связанные с регистрирующим прибором посредством усилителя сипишоА, а сегмент имеет контакты, расположенные по дуге окружности с определенным )валом углов, причем фиксатор рук выполнен в виде установленного в центре сегмента рычага с эпектрическим контактом и скобой для охвата запястья руки челоИсточники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 563981, кл. А 41 Н 1/ОО,// А 41 Н 43/00. 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения эргономических показателей качества конструкции плечевых швейных изделий на фигуре человека и устройство для осуществления способа | 1976 |
|
SU563961A1 |
| Способ определения эргономических показателей качества конструкции плечевых швейных изделий на фигуре человека и устройство для осуществления способа | 1978 |
|
SU745487A1 |
| Способ определения эргономических показателей качества конструкции швейных изделий и устройство для осуществления способа | 1978 |
|
SU745486A1 |
| Устройство для определения эргономических показателей качества конструкции швейных изделий | 1980 |
|
SU936873A2 |
| Устройство для определения эргономических показателей фигуры человека | 1982 |
|
SU1134158A1 |
| Способ оценки эргономических свойств элементов боевой индивидуальной экипировки военнослужащих | 2017 |
|
RU2671187C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ КОНСТРУКЦИЙ ОДЕЖДЫ НА ОСНОВЕ СОВМЕЩЕНИЯ ВИРТУАЛЬНЫХ ОБРАЗОВ ТИПОВОЙ И ИНДИВИДУАЛЬНОЙ ФИГУР | 2017 |
|
RU2669688C2 |
| ПРЕДМЕТ ОДЕЖДЫ ДЛЯ ВЕРХНЕЙ ЧАСТИ ТЕЛА ЧЕЛОВЕКА | 2022 |
|
RU2793522C1 |
| ПОВЯЗКА ЛЕЧЕБНАЯ | 2011 |
|
RU2468722C1 |
| ДИНАМИЧЕСКИЙ МАНЕКЕН С МАКЕТАМИ РУК | 2005 |
|
RU2303382C2 |