Изобретение относится к области приборостроения, в частности к штативам с автоматическим раскрытием и сложением в транспортное положение с использованием одного схвата манипулятора или одной руки оператора.
Известна конструкция штатива [3], раскрывающегося и складывающегося с использованием одной руки оператора с телескопической стойкой, опорными ногами и распорками к ним. Важной особенностью штатива является конструкция фиксирующего устройства, одним из основных элементов которого являются защелки-крылышки, а для манипуляции ими необходимо сложное устройство, функции которого выполняет рука человека и не может выполнять сравнительно простая конструкция схвата манипулятора без его усложнения с использованием современного уровня техники. Кроме того, складывание штатива под собственным весом требует защиты трущихся поверхностей от попадания грязи, что приводит к усложнению конструкции.
Известна конструкция штатива с полуавтоматическим раскладыванием опорных ног [2] . В этой конструкции для установки штатива из собранного состояния необходимо использование обеих рук человека, расфиксирующих нижнюю крышку штатива, после чего под действием сжатой при складывании пружины ползун толкается вниз, раскрывая тем самым опорные ноги. Складывание опорных ног возможно также только при использовании обеих рук человека, с применением значительных усилий для сжатия пружины.
Известна конструкция штатива [1], состоящая из стойки с кольцевым подпружиненным узлом, к которому крепятся и опорные ноги и две пары расположенных на разных уровнях распорок. Данная конструкция штатива выбрана за прототип.
В этой конструкции установка штатива с раздвижением опорных ног с помощью распорок возможна только при использовании двух рук, чтобы опустить или поднять кольцевой подпружиненный узел.
Рассмотрены также конструкции в смежной области техники - автоматическое раскрытие и закрытие зонтов. Объединяет обе области техники использование в механизмах раскрытия и складывания в качестве силовых элементов пружин, а в качестве фиксаторов - всевозможных защелок и кнопок, а также телескопических элементов и взаимно скользящих деталей.
Предложенная конструкция штатива предполагает использование ее как в закрытых помещениях, так и на открытых грунтах, что затрудняет использование телескопических элементов без защиты от загрязнения.
Значительное количество конструкций зонтов предусматривает автоматическое раскрытие и ручное закрытие, другая значительная часть конструкций предусматривает и автоматическое открытие и автоматическое закрытие, но с использованием обеих рук человека.
Сущностью предлагаемой конструкции штатива является совокупность признаков, позволяющих установить штатив из транспортного положения и вновь собрать его в транспортное положение с помощью схвата манипулятора робототехнического устройства, состоящего из стойки, нижняя часть которой выполнена полой, с размещением в ней механизма раскрытия и складывания штатива и верхней части, на которой размещен механизм управления раскрытием и складывания штатива, а также опорных ног на шарнирах с шарнирными распорками, в результате взаимодействия которых с установленным в полой части механизмом и механизмом управления происходит раскрытие и складывание штатива.
Конструкция штатива по предлагаемому изобретению поясняется чертежами, где
фиг. 1 - штатив в сложенном состоянии (транспортное положение);
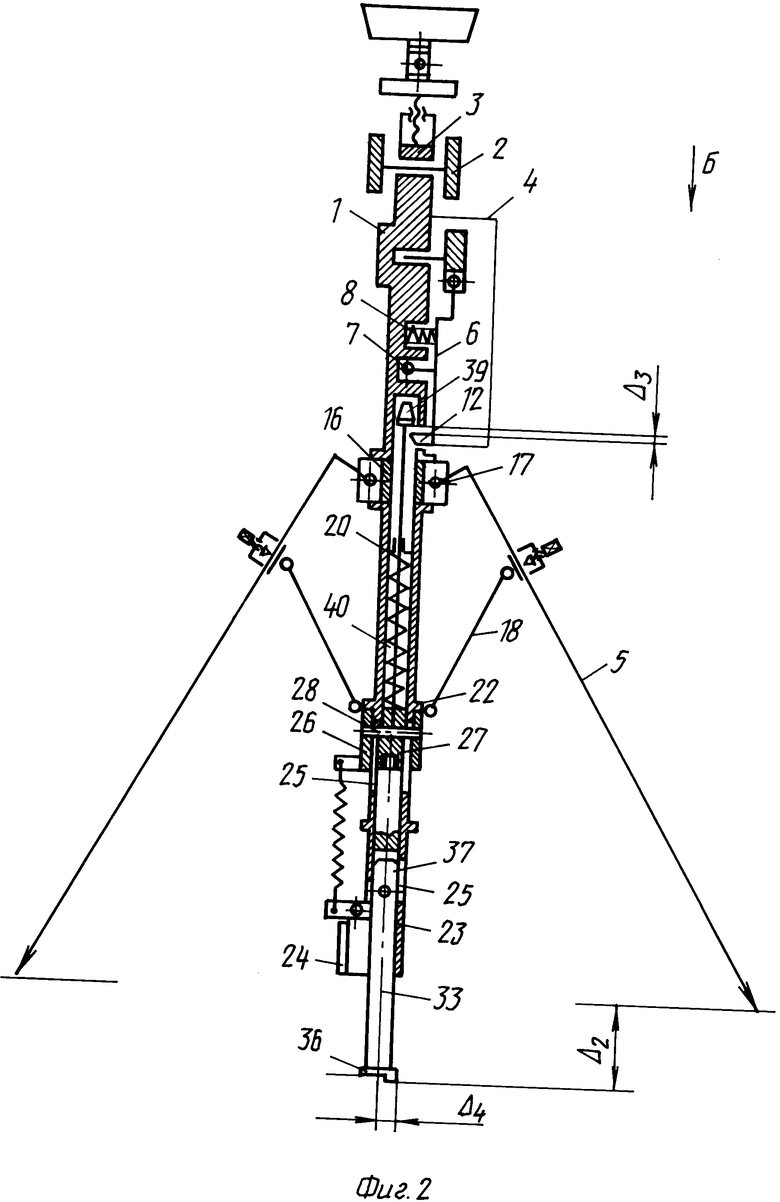
фиг. 2 - раскрытый штатив в промежуточном положении;
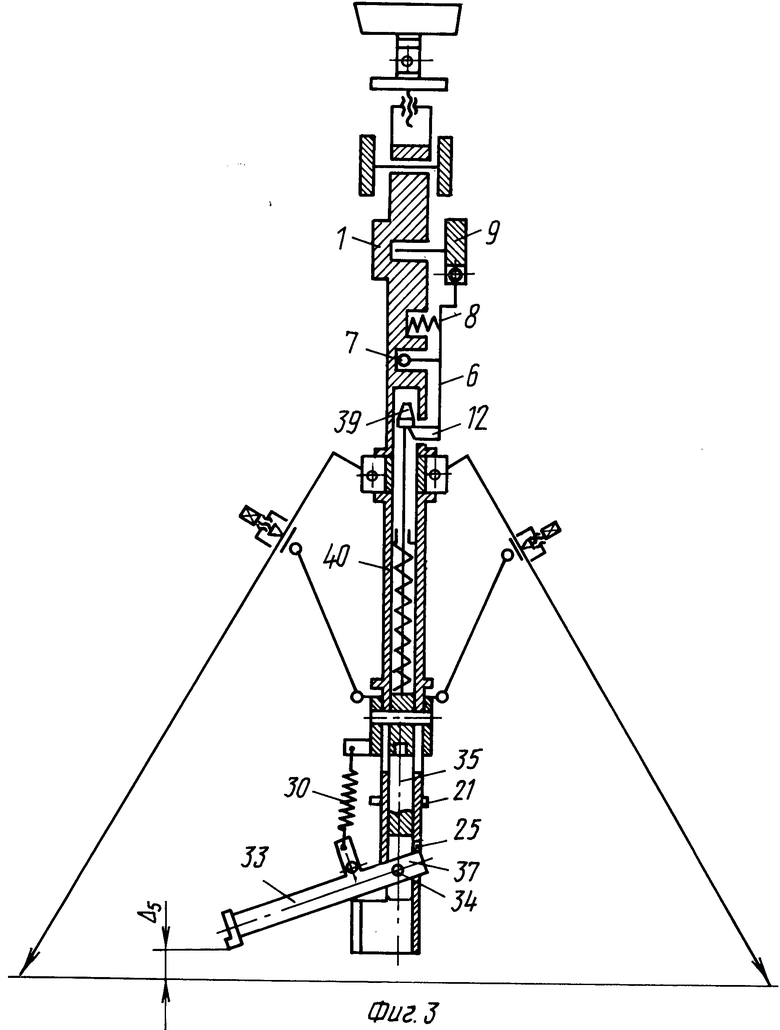
фиг. 3 - полностью раскрытый штатив;
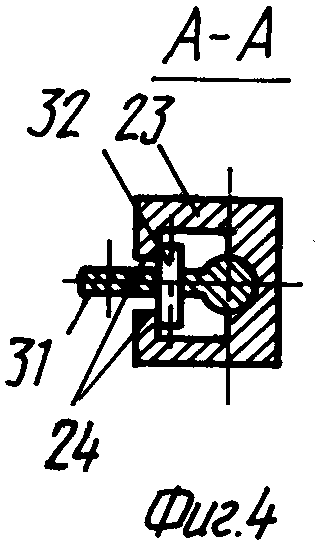
фиг. 4 - сечение А-А фиг. 1.
Штатив состоит из стойки 1 с нажимными дисками 2, закрепленными на оси 3, механизма управления 4 раскрытием опорных ног 5 и их сборкой в транспортное положение с помощью одной руки или схвата манипулятора, состоящего из защелки 6, с возможностью поворота вокруг оси 7, один конец которой установлен с опорой на пружину 8 и снабжен кнопкой 9 в форме диска с шарниром 10 и валиком 11, а другой конец снабжен стопором 12 с конической поверхностью 13. Верхний торец стойки 1 соединен винтом 14 с площадкой 15 для установки на ней телекамеры с приемопередающим устройством и аккумулятором или других необходимых приборов. Стойка 1 своим основанием жестко закреплена на торце фланца 16, в котором с помощью шарниров 17 установлены опорные ноги 5, шарнирно соединенные с распорками 18, причем шарнир 19 выполнен с возможностью перемещения вдоль ног 5 для регулирования величины полного раскрытия их в зависимости от величины опорной площадки для ног.
К нижнему торцу фланца 16 прикреплен полый в виде трубы корпус 20 с ограничительными поясками 21, 22 и хвостовиком 23, снабженным Т-образным пазом с опорными выступами 24 и прорезью 25. Пружинный механизм раскрытия-складывания опорных ног 5, расположенный на корпусе 20, содержит ползун 26 и ползушку 27, установленные коаксиально относительно корпуса 20, причем ползун 26 расположен снаружи корпуса 20, а ползушка 27 - внутри. Ползун 26 и ползушка 27 связаны между собой штифтом 28 с возможностью скольжения последнего по пазам 29, выполненным в корпусе 20. Ползун 26 с одной стороны шарнирно связан с распорками 18, а с другой - пружиной растяжения 30 с рычагом 31, снабженным ограничительным штифтом 32 штанги 33, установленной в хвостовике 23 корпуса 20. Ограничительный штифт 32 выполнен с возможностью взаимодействия с опорными выступами 24 хвостовика 23, а штанга 33 через шарнир 34 связана с валиком 35, жестко прикрепленным к нижнему торцу ползушки 27, причем штанга 33 снабжена снизу эксцентричной пятой 36, а сверху - насадкой 37 с возможностью вхождения в прорезь 25. К верхнему торцу ползушки 27 прикреплен шток 38 с наконечником 39 с возможностью взаимодействия со стопором 12 защелки 6. Концентрично штоку 38 расположена пружина сжатия 40 с возможностью взаимодействия одним концом с верхним торцом ползушки 27, а другим концом выполнена с опорой на внутренний буртик 41 корпуса 20.
Работает устройство следующим образом.
Для установки штатива из транспортного положения (штатив сложен) на опорную площадку пальцы руки или схват манипулятора робота устанавливаются на нажимных дисках 2 и поднимают штатив вверх, при этом штатив за счет собственного веса поворачивается вокруг оси 3 и принимает строго вертикальное положение штангой 33 с пятой 36 вниз. Затем штатив опускают (в направлении по стрелке Б) до соприкосновения с опорной площадкой пяты 36, при этом между пятой 36 и опорными ногами 5 образуется зазор Δ1 . При дальнейшем движении штатива в этом же направлении нажимное усилие заставляет перемещаться стойку 1 с механизмом управления 4, фланец 16 и корпус 20 с хвостовиком 23 относительно неподвижных штанги 33 с пятой 36 и рычагом 31, ползуна 26, ползушки 27, штока 38 с наконечником 39, при этом сжимается пружина 40, причем пазы 25 корпуса 20 перемещаются относительно штифта 27, при этом распорки 18, воздействуя на опорные ноги 5 штатива, заставляют их поворачиваться вокруг шарниров 17 фланца 16 и в конце хода вниз ограничительный поясок 22 упирается в верхнюю торцевую поверхность ползуна 26, а прорезь 25 хвостовика 23 становится напротив насадки 37 штанги 33, при этом ограничительный штифт 32 выходит из контакта с опорными выступами 24 и между опорными ногами 55 и пятой 36 (опорной поверхностью) образуется зазор Δ2 .
Одновременно с этим наконечник 39 штока 38 своей конической поверхностью воздействует на стопор 12 защелки 6. Защелка 6 поворачивается вокруг оси 7, сжимая пружину 8.
В дальнейшем наконечник 39 проходит стопор 12 и под действием сжатой пружины 8 защелка 6 возвращается в исходное положение, причем между нижним торцом наконечника 39 и стопором 12 образуется зазор Δ3 .
При поднятии штатива над опорной поверхностью под действием сжатой пружины 40 перемещается вниз ползушка 27, шток 38 и нижний торец наконечника 39 входит в контакт со стопором 12 (ликвидируется зазор Δ3 ), тем самым опорные ноги 55 надежно фиксируются в раскрытом положении, а под действием пружины 30 штанга 33 с пятой 36 через рычаг 31 поворачивается по часовой стрелке вокруг шарнира 34, причем насадка 37 располагается в прорези 25 и входит в контакт с нижней кромкой прорези 25, тем самым образуется зазор между пятой 36 и опорными ногами 5 ( Δ5 ), что позволяет при опускании штатива вниз вставать опорными ногами 5 на опорную площадку.
При приведении штатива в транспортное положение (т.е. при необходимости сложить ноги 5) пальцы рук или схват манипулятора, охватывая стойку 1, нажимают на кнопку 9 и одновременно поджимают штатив к опорной поверхности, при этом защелка 6, сжимая пружину 8, поворачивается вокруг оси 7, сдвигая стопор 12 в сторону, который тем самым выходит из контакта с нижней торцевой поверхностью наконечника 39, позволяя пружине 40, растягиваясь, толкать ползушку 27, а через штифт 28 и ползун 26 вниз. Вместе с ползушкой 27 вниз двигается и валик 35 со штангой 33 и пятой 36, а насадка 37, упираясь в нижнюю кромку прорези 25, заставляет поворачиваться штангу 33 вокруг оси 34 и принять вертикальное положение, при этом ограничительный штифт 32 войдет в Т-образный паз с опорными выступами 24. Одновременно перемещающийся вниз ползун 26 увлекает за собой шарнирные распорки 18, те в свою очередь складывают опорные ноги 5, причем нижний торец ползуна 26 упирается в ограничительный поясок 21. Тем самым штатив собран и готов к транспортировке.
В зависимости от размера опорной площадки регулировка величины раскрытия опорных ног 5 осуществляется перемещением шарниров 19 вдоль опорных ног 5 с последующим их закреплением, а для гарантированного прижатия штанги 33 к хвостовику 23 во время раскрытия штатива пята 36 выполнена с эксцентриситетом Δ4 относительно оси штатива.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОТБОРА ПРОБ ЖИДКОСТИ | 1998 |
|
RU2139513C1 |
| СЪЕМНОЕ УСТРОЙСТВО ДЛЯ УСТАНОВКИ ВЫНОСНОГО ПРИБОРА | 2008 |
|
RU2384900C1 |
| СТРЕЛКОВОЕ ОРУЖИЕ И ПРИКЛАД СТРЕЛКОВОГО ОРУЖИЯ | 2013 |
|
RU2543139C1 |
| Устройство автоматической смены инструмента манипулятора | 1988 |
|
SU1583286A1 |
| Миномёт Староверова - I | 2015 |
|
RU2616091C1 |
| Бобинодержатель | 1987 |
|
SU1437332A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| ПОДВЕСКА НАВЕСНОГО ОБОРУДОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2118787C1 |
| СКЛАДНОЙ КОМПЛЕКТ "ТОРГОВОЕ МЕСТО" | 1990 |
|
RU2062597C1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1997 |
|
RU2113978C1 |
Штатив используется в случаях, когда необходимо автоматическое раскрытие и складывание штатива в транспортное положение. При этом решается задача установки штатива в рабочее и транспортное положение с помощью одного схвата манипулятора или одной руки оператора, что позволяет использовать его в опасной для человека среде, обслуживаемой робототехническими устройствами. Штатив включает стойку, в которой монтируется механизм управления, фланец с шарнирно закрепленными в нем опорными ногами штатива, в полой части которого располагаются механизм раскрытия и складывания опорных ног с распорками, в результате взаимодействия которых с установленным в полой части корпуса механизмом происходит раскрытие штатива с установкой его на выбранной опорной площадке и складывание его в транспортное положение. 2 з.п. ф-лы, 4 ил.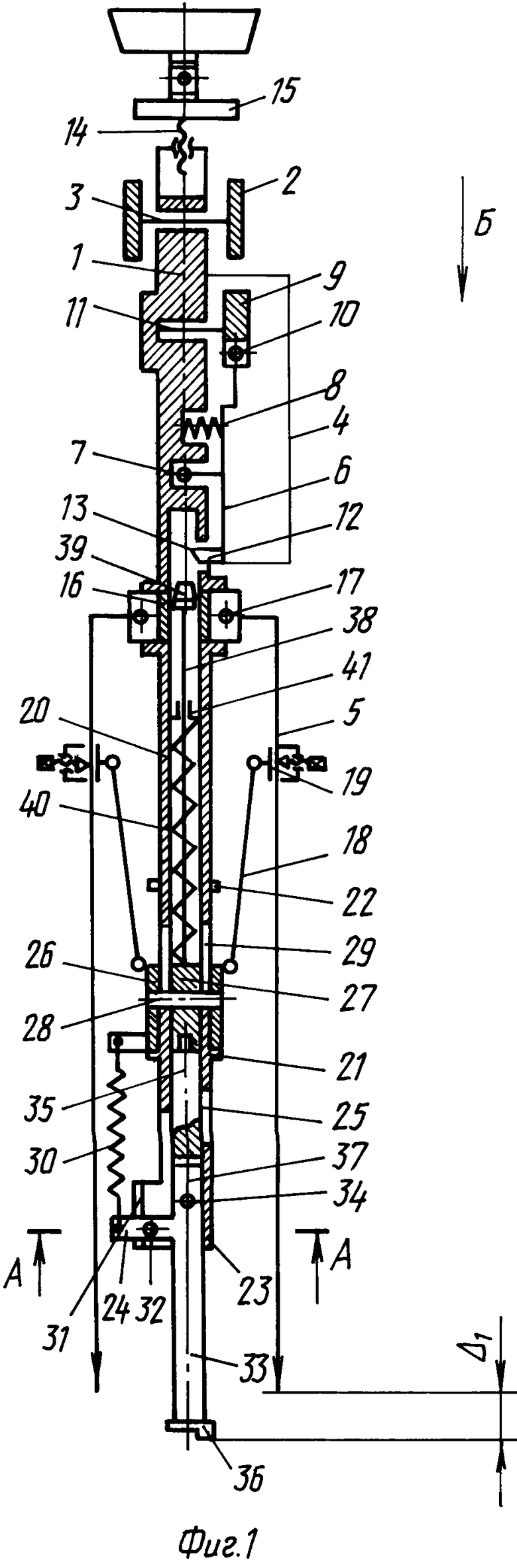
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5421544 A, 06.06.95 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 3632073 A, 04.01.72 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 3064932 A, 20.11.62. | |||
