2. Система по п. 1, отличающаяся тем, что блок формирования управляющего сигнала приводом гелиоустановки выполнен в виде дифференциального усилителя и сумматора, электрически соединенных между собой непосредственно и через пороговый элемент с характеристикой симметричного
трехпозиционного поляризованного реле, запитанный двухполярным источником.
3. Система по пп. 1 и 2, отличающаяся тем, что датчик слежения снабжен оптическим блоком в виде линз, закрепленных в корпусе и на токовой рамке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гелиокомплекс | 1983 |
|
SU1141274A1 |
| Датчик положения солнца | 1980 |
|
SU901757A1 |
| Датчик слежения за положением Солнца | 1985 |
|
SU1270497A1 |
| Датчик системы слежения гелиоустановки | 1982 |
|
SU1040290A1 |
| Система для измерения солнечных спектров атмосферы | 2022 |
|
RU2789993C1 |
| Многоходовая оптическая кювета | 1976 |
|
SU737790A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2089856C1 |
| Широкозахватный фотодатчик ориентации гелиостата | 1986 |
|
SU1401292A1 |
| СКАНИРУЮЩАЯ СИСТЕМА | 1991 |
|
RU2024896C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1995 |
|
RU2101742C1 |
1. СИСТЕМА СЛЕЖЕНИЯ ГЕЛИОУС1ТАНОВКИ, содержащая оптически связанный с гелиоустановкой датчик слежения, снаружи корпуса которого расположены теневой экран и входные торцы световодов канала грубого слежения, а внутрисветоводы канала точного слежения и светочувствительные элементы, обращенные к выходным торцам последних и световодов канала грубого слежения, и блок формирования управляющего сигнала приводом гелиоустановки, электрически соединенный со светочувствительными элементами, отличающаяся тем, что, с целью повыщения точности слежения, система снабжена датчиком скорости перемещения привода гелиоустановки, постоянным магнитом и взаимодействующей с ним к упруго закрепленной внутри корпуса датчика слежения токовой рамкой с зеркалом, отражающая поверхность которого расположена наклонно к оптической оси датчика, причем световоды канала точного слежения выполнены обращенными входными торцами к отражающей поверхности зеркала, а светочувствительные элементы - в виде фоторезисторов и включены в смежные плечи электрического моста, к выходной диагонали которого параллельно блоку формирования управI ляющего сигнала подключены последовательно токовая рамка и выход датчика ско(Л рости. 00 СП оо
1
Изобретение относится к гелиотехнике, в частности к системам слежения гелиоустановок.
Известна система слежения гелиоустановки, содержащая оптически связанный с гелиоустановкой датчик слежения, снаружи корпуса которого расположены теневой экран и входные торцы световодов канала грубого слежения, а внутри - световоды канала точного слежения и светочувствительные элементы, обращенные к выходным торцам последних и световодов канала грубого слежения, и блок формирования управляющего сигнала приводом гелиоустановки, электрически соединеный со светочувствительными элементами.
В этой системе слежения при малых угловых рассогласованиях оптической оси датчика и направлением на Солнце происходит неравномерное освещение светочувствительных элементов световодами канала точного слежения. Дифференциально соединенные светочувствительные элементы с помощью блока формирования вырабатывают управляющий сигнал, поступающий на привод гелиоустановки 1.
Повышение точности слежения известной системы ограничено ее статизмом, оптическим рычагом датчика и неустойчивостью перехода с канала грубого слежения на канал точного слежения по мере разориентации (нарушения юстировки) датчика.
Целью изобретения является повышение точности слежения.
Поставленная цель достигается тем, что система слежения гелиоустановки, содержащая оптически связанный с гелиоустановкой датчик слежения, снаружи корпуса которого расположены теневой экран и входные торцы световодов канала грубого слежения, а внутри - световоды канала точного слежения и светочувствительные элементы, обращенные к выходным торцам последних и световодов канала грубого слежения, и блок формирования управляющего сигнала приводом гелиоустановки, электрически соединенный со светочувствительными элементами, снабжена датчиком скорости перемещения привода гелиоустановки, постоянным магнитом и взаимодействующей с ним и упруго закрепленной внутри корпуса датчика слежения токовой рамкой с зеркалом, отражающая поверхность которого расположена наклонно к оптической оси датчика, причем световоды канала точного слежения выполнены обращенными входными торцами к отражающей поверхности зеркала, а светочувствительные элементы - в виде фоторезисторов и включены в смежные плечи электрического моста, к выходной диагонали которого параллельно блоку формирования управляющего сигнала подключены последовательно токовая рамка и выход датчика скорости.
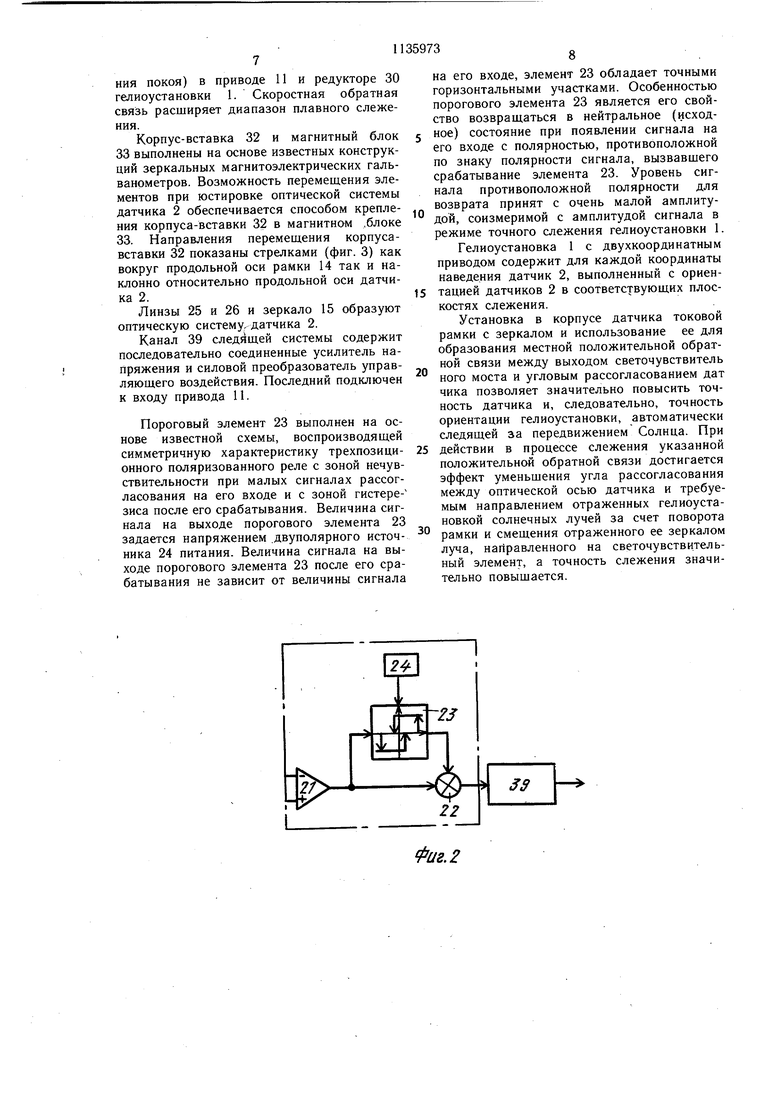
Кроме того блок формирования управляющего сигнала приводом гелиоустановки выполнен в виде дифференциального усилителя и сумматора, электрически соединенных между собой непосредственно и через пороговый элемент с характеристикой симметричного трехпозиционного поляризованного реле, запитанный двухполярным источником.
Причем датчик слежения снабжен оптическим блоком в виде линз, закрепленных в корпусе и на токовой рамке.
На фиг. 1 показана функциональная схема системы слежения гелиоустановки и конструктивная схема датчика слежения, продольное сечение в плоскости слежения;
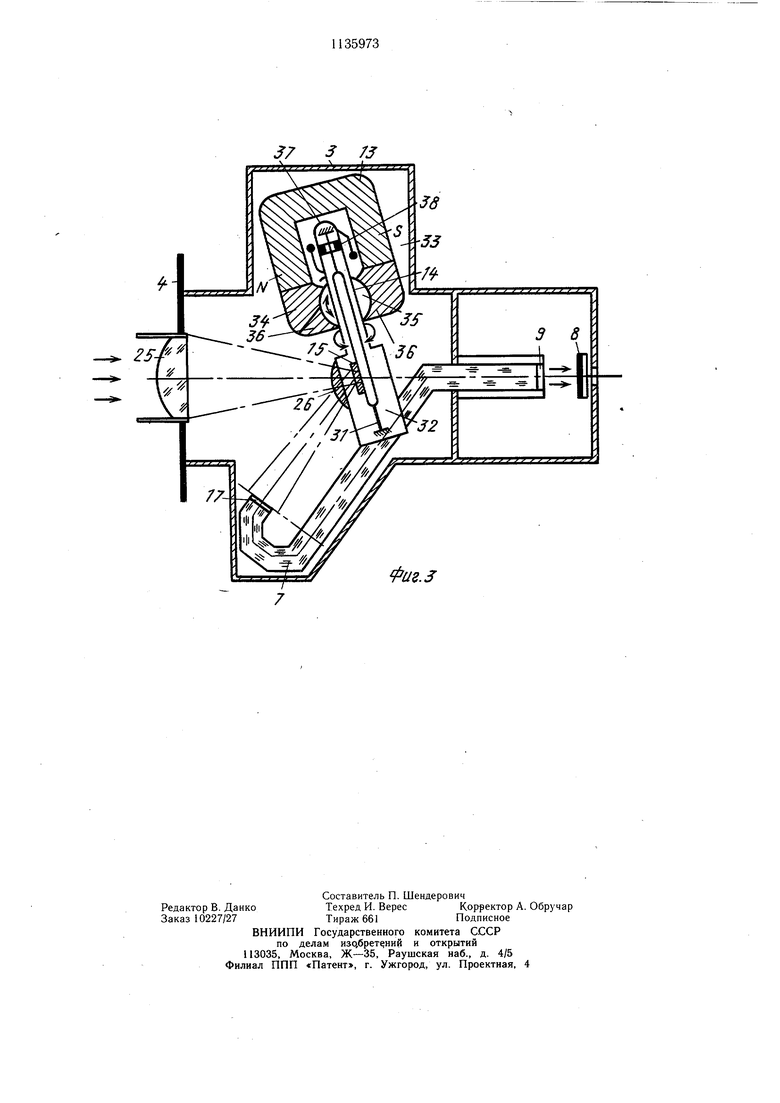
0 на фиг. 2 - функциональная схема блока формирования управляющего сигнала приводом гелиоустановки; на фиг. 3 - конструктивная схема датчика слежения, продольное сечение в плоскости, перпендикулярной плоскости слежения.
Система слежения гелиоустановки содержит оптически связанный с гелиоустановкой 1 (фиг. 1) датчик 2 слежения, снаружи корпуса 3 которого расположены теневой экран 4 и входные торцы 5 светово0 Дов 6 канала грубого слежения, а внутри световоды 7 канала точного слежения и светочувствительные элементы 8, обращенные к выходным торцам 9 последних и световодов 6 канала грубого слежения, и блок 10 формирования управляющего сигнала приводом 11 гелиоустановки 1, электрически соединенный со светочувствительными элементами 8. Система слежения снабжена датчиком 12 скорости перемещения привода 11 гелиоустановки 1, постоянным магнитом 13 и взаимодействующей с ним и упруго закрепленной внутри корпуса- 3 датчика 2 слежения токовой рамкой 14с зеркалом 15, отражающая поверхность которого расположена наклонно к оптической оси 16 датчика 2, причем световоды 7 канала точного слежения выполнены обращенными входными торцами 17 к отражающей поверхности зеркала 15, а светочувствительные элементы 8 в виде фоторезисторов и включены в смежные плечи 18 электрического моста 19, к выходной диагонали которого параллельно блоку 10 формирования управляющего сигнала подключены последовательно токовая рамка 14 и выход 20 датчика 12 скорости. с„„., 1п /,4- о А.,,.,,. ,,,„, Блок 10 (фиг. 2) формирования управляющего сигнала приводом 11 гелиоустановки 1 выполнен в виде дифференциального усилителя 21 и сумматора 22, электрически соединенных между собой непосредственно .и через пороговый элемент 23 с характеристикой симметричного трехпозиционного поляризованного реле, запитанный двухполярным источником 24.
Датчик 2 (фиг. 3) положения снабжен оптическим блоком в виде линз 25 и 26, закрепленных в корпусе 3 и на токовой рамке 14 соответственно.
Смежные плечи 27 (фиг. 1) моста 19 отключают резисторы 28, а его входная диагональ подключена к источнику 29 постоянного напряжения.
Привод 11 подсоединен к гелиоустановке 1 через понижающий редуктор 30. Рамка 14 (фиг. 1 и 3) подвешена на растяжках 31 и помещена в корпус-вставку 32 (фиг. 3), снабженную вклеенной линзой 26 перед зеркалом 15. Положение вставки 32 жестко фиксируется при юстировке датчика 2 в магнитном блоке 33, включающем постоянный магнит 13, полюсные наконечники 34, подвижный вкладыш 35 и клиновый зажим 36. Металлический колпачок 37 внешнего токоподвода рамки 14 изолирован пластмассовым кольцом 38 от корпуса-вставки 32.
Система слежения гелиоустановки содержит канал 39 (фиг. 1 и 2) управления. Токовая рамка 14 (фиг. 1) замкнута на внещний резистор 40 с величиной сопротивления, требуемой по условиям демпфирования рамки 14 при ее движении в магнитном поле.
На фиг. 1 также показано световое пятно 41, создаваемое линзой 26 на входных торцах 17 световодов 7 канала точного слежения.
Система слежения гелиоустановки работает следующим образом.
При малых углах рассогласования датчика 2 происходит смещение лучей, сфокусированных линзами 25 и 26 на зеркале 15 токовой рамки 14. Отраженные от зеркала 15 лучи образуют световое пятно 41, смещенное относительно центральной зоны входных торцов 17 световодов 7 канала точного слежения (на фиг. 1 смещенное пятно защтриховано). Входные торцы 17 засвечиваются неодинаково, и по одному из световодов 7 канала точного слежения свет попадает больше на один светочувствительный элемент 8. На выходной диагонали моста 19 появляется электрический сигнал рассогласования, который поступает на токовую рамку 14. По ней протекает ток, соответствующий рассогласования, который взаимодействуя с магнитным полем постоянного магнита 13 (фиг. 3), вызывает поворот рамки 14, подвешенной на растяжках 31. Растяжки 31 являются одновременно токоподводами.
Зеркало 15 (фиг. I), закрепленное на рамке 14, поворачивается вместе с ней и наQ правляет отраженный луч еще больше в сторону первоначального смещения светового пятна 41 по входному торцу 17 одного из световодов 7, вызывая дополнительное увеличение освещенности элемента 8, т.е. действуя как положительная обратная связь.
5 Благодаря повороту рамки 14 и зеркала 15 еще больше засвечивается тот же элемент 8 и возрастает ток в рамке 14, увеличивается вращающий момент рамки 14, который При ориентации оптической оси 16 {фиг. 1) датчика 2 строго вдоль направления солнечных лучей, отраженных от зеркала гелиоустановки 1, внешняя образующая теневого экрана 4 перекрывает входные торцы 5 световодов 6 канала грубого слежения. Лучи, проникающие в корпус 3 датчика токовой рамки 14 через линзу 25, отражаются от зеркала 15 и образуют световое пятно 41 в плоскости входных торцев 17 световодов 7 канала точного слежения, ориентируясь симметрично в промежутке между входными торцами 17 (контур светоg pQ „ятна показан на фиг. 1 пунктиром), Светочувствительные элементы 8 не засвецены или одинаково освещены слабым светоg фоном, излучаемым выходными торца и 9 световодов 6 и 7 каналов грубого и точного слежения. При этом не нарушается электрический баланс моста 19, на его выходной диагонали не возникает разности потенциалов, и следовательно электричес сигнал на выходе дифференциального усилителя 21 равен нулю. Канал 39 управления следящей системы также не вырабатывает управляющего воздействия на привод 11, и гелиоустановка 1 неподвижна. По токовой рамке 14 ток не протекает, и она с зеркалом 15 находится в нейтральном положении, не вызывая перемещения светового пятна 41.
уравновешивается противодействующим моментом растяжек 31 при их закручивании. Сигнал на выходе электрического моста 19 через дифференциальный усилитель 21 поступает в канал 39 следящей системы, вырабатывающий управляющее воздействие. Гелиоустановка 1 приводится во вращение приводом 11 через понижающий редуктор 30. Благодаря действию главной оптической обратной связи между гелиоустановкой 1 и датчиком 2 и сигнала датчика 12 скорость слежения гелиоустановки 1 устанавливается следящей системой в соответствии со скоростью передвижения Солнца, а процесс слежения приобретает устойчивый характер. Внещнее углово.е рассогласование между оптической осью 16 датчика 2 и направлением отраженных от гелиоустановки лучей, равное dL, обуславливает точность слежения и уменьшается благодаря появлению внутреннего угла поворота отраженных от зеркала 15 лучей. Суммарный же угол смещения светового пятна 41 относительно его направления положения равен oC+jB.
Чем чувствительнее поворот рамки 14 к току, тем выше становится точность лежения гелиоустановки 1.
С ростом скорости слежения за движением Солнца внешний и внутренний углы с/, и j5 рассогласования датчика 2 увеличиваются каждый пропорционально скорости слежения, но внутренний угол увеличивается в большей степени, чем внешний угол А.
При малых углах рассогласования датчика 2 в режиме точного слежения гелиоустановки 1 смещение тени от экрана 4 относительно входных торцев 5 световодов 6 канала грубого слежения незначительно, поэтому канал грубого слежения не работает.
При значительной разориентации направления отраженных от гелиоустановки 1 солнечных лучей относительно оптической оси 16 датчика 2, например, в результате длительной облачности, тень от экрана 4 не закрывает входной торец 5 одного из световодов 6 канала грубого слежения, и излучение направляется на один из элементов 8. Поскольку световод 6 канала грубого слежения имеет площадь поперечного сечения, превосходящую площадь сечения световода 7 канала точного слежения, то интенсивность засветки элемента 8 при больших внешних рассогласованиях датчика 2, равных углу о, приводит к значительному росту амплитуды сигнала на выходе электрического моста 19. Этот сигнал вызь1вает срабатывание порогового элемента 23 (фиг. 2), полярный сигнал на выходе которого, пройдя через сумматор 22 в канал 39 следящей системы, приводит привод 11 (фиг. 1) во вращение в соответствующем направлении с большой скоростью, значительно превосходящей по величине скорость точного слежения. Происходит ускоренный поворот
гелиоустановки 1 в сторону требуемой.ориентации отраженных от нее лучей, т.е. в сторону уменьшения угла rf рассогласования датчика 2.
При больших угловых рассогласованиях в режиме ускоренного вращения гелиоустановки 1 канал точного слежения может не функционировать и не вырабатывает полезных сигналов. Для повышения четкости переключения канала 39 следящей системы с режима грубого слежения на точное слежение применен пороговый элемент 23 (фиг. 2), имеющий характеристику трехаозиционного поляризованного реле с возвратом в свое исходное состояние при появлении на его
входе малого сигнала противоположной полярнойти, получаемого от канала точного слежения. Такая характеристика порогового элемента 23 позволяет надежно обеспечить селекцию сигналов грубого и точного слежения на выходе канала 39, а при работе в режиме грубого слежения обеспечивает полную выработку следящей системой больших углов с рассогласования на ускоренном вращении. Ускоренное вращение завершается четким возвратом порогового элемента 23 в исходное состояние и автоматическим плавным переходом канала 39 следящей системы на режим точного слежения при малых углах о( рассогласования. При этом происходит кратковременная отработка каналом точного слежения малого сигнала противоположной полярности при малом отрицательном угле рассогласования с последующим реверсом и далее с продолжением вращения в сторону рабочего слежения гелиоустановки 1. Кроме того, пороговый элемент
5 23 с предлагаемой характеристикой позволяет существенно упростить юстировку датчика 2 по согласованию четкого взаимодействия каналов грубого и точного слежения.
Q Пример. Формирование скоростной отрицательной обратной связи осуществляется датчиком 12 скорости, выполненным в виде тахогенератора, вал которого механически соединен с валом привода 11. Датчик 12 включает корректирующее звено в цепи формирующего сигнала скоростной обратной связи, выполненное с применением емкостных элементов и активных сопротивлений для согласования с электромеханическими параметрами рамки 14. Сформированный таким образом сигнал на выходе датчика 12, который подключен последовательно с рамкой 14, уменьшает инерционность звеньев канала 39 следящей системы, улучшает ее устойчивость по скорости, устраняет неплавные движения с задержками и рывками на низких «ползучих скоростях слежения. Скачкообразность слежения на низких скоростях может появляться из-за влияния момента статического трения (трения покоя) в приваде 11 и редукторе 30 гелиоустановки 1. Скоростная обратная связь расширяет диапазон плавного слежения.
Корпус-вставка 32 и магнитный блок 33 выполнены на основе известных конструкций зеркальных магнитоэлектрических гальванометров. Возможность перемещения элементов при юстировке оптической системы датчика 2 обеспечивается способом крепления корпуса-вставки 32 в магнитном .блоке 33. Направления перемещения корпусавставки 32 показаны стрелками (фиг. 3) как вокруг продольной оси рамки 14 так и наклонно относительно продольной оси датчика 2.
Линзы 25 и 26 и зеркало 15 образуют оптическую систему, датчика 2.
Канал 39 следящей системы содержит последовательно соединенные усилитель напряжения и силовой преобразователь управляющего воздействия. Последний подключен к входу привода 11.
Пороговый элемент 23 выполнен на основе известной схемы, воспроизводящей симметричную характеристику трехпозиционного поляризованного реле с зоной нечувствительности при малых сигналах рассогласования на его входе и с зоной гистерезиса после его срабатывания. Величина сигнала на выходе порогового элемента 23 задается напряжением .двуполярного источника 24 питания. Величина сигнала на выходе порогового элемента 23 после его срабатывания не зависит от величины сигнала
на его входе, элемент 23 обладает точными горизонтальными участками. Особенностью порогового элемента 23 является его свойство возвращаться в нейтральное (исходное) состояние при появлении сигнала на его входе с полярностью, противоположной по знаку полярности сигнала, вызвавщего срабатывание элемента 23. Уровень сигнала противоположной полярности для возврата принят с очень малой амплитудои, соизмеримой с амплитудой сигнала в режиме точного слежения гелиоустановки 1. Гелиоустановка 1 с двухкоордиватным приводом содержит для каждой координаты наведения датчик 2, выполненный с ориентацией датчиков 2 в соответствующих плоскостях слежения.
Установка в корпусе датчика токовой рамки с зеркалом и использование ее для образования местной положительной обратной связи между выходом светочувствитель ного моста и угловым рассогласованием дат чика позволяет значительно повысить точность датчика и, следовательно, точность ориентации гелиоустановки, автоматически следящей за передвижением Солнца. При
действии в процессе слежения указанной положительной обратной связи достигается эффект уменьшения угла рассогласования между оптической осью датчика и требуемым направлением отраженных гелиоустановкой солнечных лучей за счет поворота рамки и смещения отраженного ее зеркалом луча, направленного на светочувствительный элемент, а точность слежения значительно повыщается.
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик системы слежения гелио-ТЕХНичЕСКОй уСТАНОВКи | 1979 |
|
SU800514A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
