Изобретение относится к устройствам автоматического управления направлением лучом оптических квантовых генераторов и средствами регистрации оптической информации и может найти применение в устройствах визуализации для исследования дисперсных сред, например, при масс-спектрометрическом анализе.
Известно двухкоординатное устройство для программного управления [1], содержащее блок сравнения, цифроаналоговый преобразователь (ЦАП), сумматор координирующих сигналов, сервопривод исполнительного механизма, датчик положения, релейный элемент и коммутаторы, регистр блока программного управления.
Наличие релейного элемента электропривода исполнительного механизма может приводить систему в режим автоколебаний, а также снижать динамическую точность устройства и возможности его автоматизации.
Наиболее близким к предлагаемому является сканирующее устройство кругового обзора [2] , которое содержит цилиндрический корпус, в котором установлен отражательный элемент в виде зеркала в оправе, соединенный через механизм поворота с электроприводом.
Недостатком указанного сканирующего устройства является наличие только двух координатных осей сканирования, ограничение обозреваемого пространства и ручное управление, что уменьшает точность восприятия оптической информации.
Предлагаемое изобретение позволяет расширить функциональные возможности устройства за счет увеличения пространства сканирования и повышения точности за счет исключения "мертвой зоны".
Сущность изобретения заключается в том, что в сканирующую систему, содержащую цилиндрический корпус, в котором установлен отражательный элемент в виде зеркала в оправе, соединенный через механизм поворота с электроприводом, введена система управления электроприводом, выполненная в виде трехканальной следящей сервосистемы, состоящей из блока программного управления и головки системы управления, выполненной сдвоенной и включающей в каждой половине три канала управления, каждый из которых содержит последовательно соединенные первый сумматор, цифроаналоговый преобразователь, второй сумматор, усилитель и двигатель-генератор, первый выход которого соединен с вторым входом блока суммирования, а второй вход - с редуктором, выход которого соединен через механизм поворота с оправами линз и зеркала, а также введен светоделитель на выходе управляемого источника излучения, оптически соединенный с введенной линзой и зеркалом каждой половины головки системы управления, в каждую половину головки системы управления введены механизмы поворота линзы, установленной в карданном подвесе, толкатель рамки карданного подвеса линзы, выполненной с двумя связанными с оправой линзы осями, установленными в двух шлицах стойки головки системы управления с возможностью перемещения, и привод толкателя рамки карданного подвеса линзы. Также в систему введены блок синхронизации, первый, второй и третий входы которого соединены с управляемым источником излучения, с входами введенных фоторезистора и видеокамеры соответственно, причем первый, второй и третий выходы блока программного управления соединены с входами первых сумматоров первого, второго и третьего каналов управления каждой половины головки системы управления соответственно, дополнительные выходы блока программного управления соединены с входом блока синхронизации и с приводом толкателя рамки карданного подвеса линзы каждой половины головки системы управления, выходы каждого канала управления каждой половины головки системы управления соединены с входами введенного видеомагнитофона через соответствующие введенные аналого-цифровые преобразователи.
Введение в систему оптического блока с раздвоением луча - светоделитель, оптически соединенный с входами ГСУ позволит увеличить обзор до сферического и создать расфокусировку. При введении блоков в указанной связи с остальными элементами схемы в заявленную систему управления система проявляет новые свойства, что приводит к повышению точности, расширению функциональных возможностей.
Точность системы повышается также за счет уменьшения "мертвой зоны" путем введения в головку дополнительного привода, связанного с механизмом поворота линзы и электромагнитного привода толкателя рамки для расфокусировки и увеличения числа координат до трех.
Повышение безопасности осуществляется за счет автоматизации процесса дистанционного управления сканированием путем использования блока программного управления и цифроаналоговой следящей системы. При включении трех каналов с тремя электродвигателями имеется возможность использовать устройство для создания и моделирования голографических устройств, а также для работы с фотоприемником и лазерами разного спектрального диапазона. Возможна обработка результатов эксперимента измерительной информации физических параметров в три этапа: оперативном, первичном и вторичном (обработкой значений в реальном масштабе времени с помощью телевизионной установки).
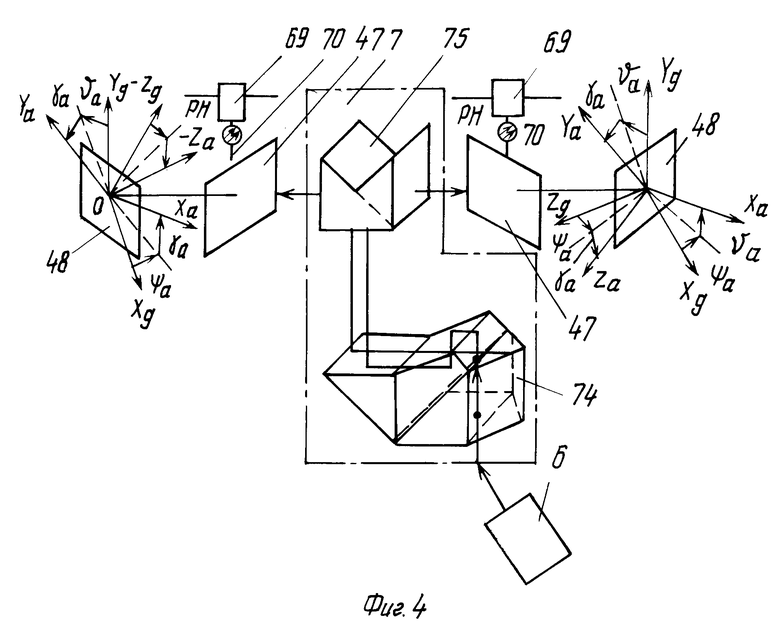
На фиг.1 дана блок-схема устройства; на фиг.2 - структурная схема электроприводов системы; на фиг.3 - трехканальная оптическая головка системы управления с цифроаналоговым приводом; на фиг.4 - оптическая система ГСУ.
Устройство содержит блок программного управления (БПУ) 1, цифроаналоговые электроприводы 2, 3 и 4 в трех каналах управления в каждой половине сдвоенной головки системы управления 5. С двумя ее входами связаны ОКГ 6 через оптический блок 7, оптическая ось которого параллельна оси ОКГ, а с выходами - видеомагнитофон 8 (аналоговая и цифровая часть) и телевизионная установка 9 (одна или две). Блок синхронизации 10 подключен к ОКГ 6, блоку фоторегистратора 11, одной или двум видеокамерам 12, 13, которые через ЭОП 14 и 15 с фоконами 16-19 на входе и выходе соединены со световодами 20 и 21. Электроприводы системы управления оптическим лучом (или плоскостью) соединены дистанционно от БПУ 1 через сумматоры (блоки сравнения) 22, 23 и 24 с цифроаналоговыми преобразователями 25, 26 и 27, связанными с помощью элементов суммирования 28, 29 и 30 с входами усилителей 31, 32 и 33, включенными на двигатели-генераторы 34, 35 и 36, один выход которых через делители напряжения 37, 38 и 39 подключен к входам элементов суммирования 28, 29 и 30. Вторые выходы двигателей-генераторов 34, 35 и 36 соединены через редукторы 40-45 с механизмом поворота 46 линзы 47 и зеркала 48. На валах редукторов 43, 44 и 45 расположены потенциометры 49, 50 и 51 с встроенными шкалами 52, 53 и 54 и соединенные через АЦП 55, 56 и 57 (по одному или двум в канале) с сумматорами 22, 23 и 24.
Механизм поворота 46 линзы по одной оси содержит двигатель-генератор 34 с редуктором 40, а по другой оси - электромагнитный привод с толкателем 58, рамку 59 с двумя полуосями 60, 61 и двумя шлицами 62, 63, двигатель-генератор 36 с редуктором 42. Механизм вращения зеркала 48 содержит поворотный столик 64 с ушами 65, жестко связанный с приводной осью 66, расположенной в стойке 67, и закрепленный на поворотной оси 68. Поворот осуществляется двигателем-генератором 35 с редуктором 41. Срабатывание ОКГ 6 контролируется фоторезистором 69, вход которого соединен со световодом 70, проложенным в стойке 71. Головка 5 выполнена в виде прозрачного цилиндра с боковой 72 и торцовой 73 стенками. ОКГ 6 связан оптически с головкой 5 через призмы 74 и 75, а управление при исследовании объектов 76 производится по алгоритмам 77.
Устройство работает следующим образом.
Луч от ОКГ 6 поступает через призму 74, разделившись на два параллельных, в прямоугольную отражательную призму 75 оптического блока 7, откуда два луча с взаимно противоположными направлениями под углом 180о поступают каждый в свою часть сдвоенной головки системы управления, в которых линза 47 и зеркало 48 приводятся в движение электроприводами 2, 3 и 4 с механизмом поворота 46 этих оптических элементов. Оттуда лучи поступают на объекты исследования 76 через боковую 72 и торцовую 73 стенки, проходя через линзу 47 и отражаясь от зеркала 48. Сигналы с БПУ 1 в соответствии с матрицами А1, А2, А3 линейного преобразования от одной системы координат ОХд, YдZд (см. фиг.2, 4) к другой ОХaYaZa, выраженными аналогично с помощью эйлеровых углов для разного типа аппаратов, поступают через сумматоры 22, 23 и 24 на ЦАП 25, 26 и 27, через элементы суммирования 28, 29 и 30 - на усилители 31, 32 и 33, подключенные к входам двигателей-генераторов 34, 35 и 36. Сигналы с них поступают на усилители 31, 32 и 33 через делители напряжения 37, 38 и 39, а движение с помощью редукторов 40-45 передается на оптические элементы - линзу 47, зеркало 48 и потенциометры 49, 50 и 51, соединенные с видеомагнитофоном 8 и телевизионной установкой 9. Сигналы с выходов потенциометров 49, 50 и 51 через АЦП 55, 56 и 57 поступают на элементы суммирования 22, 23 и 24, к входам которых подключены выходы процессоров БПУ 1.
Наличие механизма поворота зеркала 48, состоящего из оправы в виде поворотного столика 64 с ушками 65, приводимого в движение приводной осью 66, расположенной в стойке 67 и удерживаемого поворотной осью 68, позволяет при отражении луча от зеркала производить круговое сканирование по двум (вокруг Zд, Yд) осям от БПУ 1 (см. фиг.3) либо через боковые стенки прозрачного цилиндра 72, либо при установке столика 64 по команде от БПУ 1 параллельно лучу осуществлять круговое сканирование линзой 47 через торцовую стенку 73. При сканировании (одновременно с расфокусировкой) по третьей оси Хg электромагнитный привод с толкателем 58 отодвигает линзу 47 со своим зубчатым колесом и рамку 59 с полуосями 60 и 61, "плавающими" в канавках-шлицах 62 и 63, к редуктору 42. По командам БПУ 1 от блока синхронизации 10 включаются ОКГ 6, блок фоторегистратора 11, одна или две видеокамеры 12, 13, на которые поступает согласованный сигнал через ЭОП 14 и 15 с фоконами 16-19 от объектов 76 по световодам 20 и 21. Выход на обработку и контроль - видеомагнитофон 8 и телевизионную установку 9 производится с выходных потенциометров 49, 50 и 51 в каждом из трех каналов (см. фиг.2 и 3), имеющих также для удобства визуальные шкалы 52, 53 и 54, где L - идентификатор функции; γ'- номер следящей системы; δ - номер потенциометра в следящей системе.
Анализ устройства показывает, что при оптимальных значениях показателей (параметров) системы, быстродействии, например времени регулирования, и статической точности, например среднеквадратической ошибки, характеристики системы управления отвечают техническим требованиям.
Уменьшение значений параметров может привести к неустойчивым предельным циклам в фазовом пространстве, вводимом для выявления динамической точности. Увеличение значений параметров, в частности времени регулирования, может привести к уменьшению быстродействия, а возможно и к ухудшению динамической точности. Для точного кинематического описания связей между движениями роторов электродвигателей и линзой, а также выходным валом зеркала используется якобиевая матрица передаточных чисел
 f
f
 (1) где ϕвых=(ϕвых1, ϕвых2 ... ϕвых4) - вектор, элементами которого являются величины, характеризующие положение выходных валов привода.
(1) где ϕвых=(ϕвых1, ϕвых2 ... ϕвых4) - вектор, элементами которого являются величины, характеризующие положение выходных валов привода.
Якобиевая матрица передаточных чисел без учета случая, когда зеркало и поворотный столик параллельны лучу (плоскости), ввиду малого пространства сканирования
Ψдв= 


 (2)
(2)
При выводе (1,2) предполагалось, что кроме одного произвольного, остальные выходные валы неподвижны. Алгоритм составления программы управления определяется путем переходов от нормальной OXдYдZд к скоростной системе координат OXaYaZa. При одновременном повороте трех осей координат XYZ положение луча (световой плоскости) в произвольный момент времени списывается в общем виде матрицей преобразования координат
A11= 

 (3) где aμν - скалярное произведение единичных векторов, расположенных в соответствующей строке и столбце, равное косинусу угла между соответствующими единичными векторами систем координат, неподвижной и скоростной.
(3) где aμν - скалярное произведение единичных векторов, расположенных в соответствующей строке и столбце, равное косинусу угла между соответствующими единичными векторами систем координат, неподвижной и скоростной.
При одновременном приведении в действие соответствующими электродвигателями в трех каналах появится возможность использовать устройство для целей голографии, представляя в (3) обозначения углов поворота Ψ, θ, γ (см. фиг.4), получим для правого крыла в правой системе координат матрицу преобразования координат
Α 





или где Ψ - угол рыскания; θ - угол тангажа; γ - угол крена;
где Ψ - угол рыскания; θ - угол тангажа; γ - угол крена;
XдYдZд - для нормальной системы координат;
θa γa Ψa - для связанной системы координат самолета.
Для левого крыла, левая система координат, получим при умножении
A A
A (-)
(-) A
A A
A (6)
(6)
Так как для систем с точно прогнозируемым управлением важнее реагировать на монотонные сигналы без неожиданных резких всплесков, т.е. как на стационарные, инвариантность цифроаналоговой системы управления по сравнению с полностью цифровой, к внешним возмущениям и к изменению системы, будет выше, а следовательно, повысится четкость изображения на ТУ. Кроме того, она проще по той причине, что наличие в БПУ одновременно матричного процессора и вычислителя сигнала на первой и второй производной и по положению значительно усложнит блок. А также для работы при нестационарных процессах путем сочетания управления электродвигателем от специальной интегральной микросхемы, а системы управления - от специализированной ЭВМ, включающей вычислитель производной и матричный процессор, система станет полностью цифровой. При этом из-за предъявляемых к системе управления, выполненной как комбинированная следящая система, высоких требований по точности полная инвариантность может быть и не получена.
Каждой половиной головки системы управления охватывается область быстрого, последовательного, точного сканирования около полусферы, включая труднодоступные места, что в сочетании с программным, автоматизированным трехкоординатным управлением расширяет функциональные возможности устройства, работающего по алгоритмам 77 (см. фиг.2).
Устройство программного управления включает блок памяти, связанный с входами коммутаторов, подключенных к блоку синхронизации, устройствам контроля (ТУ и ВМ) и к трем каналам управления, каждый из которых состоит из последовательно соединенных блока сравнения (22, 23 и 24) ЦАП (25, 26 и 27), сумматора, сервопривода исполнительного механизма и датчика положения, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с соответствующим выходом БПУ, при этом датчики положения 49, 50 и 51 выполнены в виде потенциометров. БПУ обеспечивает перевод углового положения луча ОКГ в последовательность импульсов управляющих вращением механизмов поворота оптических элементов по двум координатам одновременно по программе управления. При подключении средств обработки контроль поворота луча и изучаемого объекта производится как с потенциометров всех каналов с видеомагнитофона и видеокамеры, так и с запоминающего устройства БПУ.
Широкие функциональные возможности системы управления сканированием ОКГ и регистрацией информации, большие углы сканирования, несколько плоскостей, наличие производных сигнала позволит применить систему в условиях космоса для задач, связанных с поиском и наведением на цель, получением оптической информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления двухкоординатным пьезокерамическим оптическим дефлектором | 2018 |
|
RU2695281C1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1027561A1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВУХКООРДИНАТНЫЙ ОДНОЗЕРКАЛЬНЫЙ ОПТИЧЕСКИЙ ДЕФЛЕКТОР | 2015 |
|
RU2606520C1 |
| ДВУХКООРДИНАТНЫЙ ОПТИЧЕСКИЙ ДЕФЛЕКТОР | 2007 |
|
RU2338231C1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДЕФЛЕКТОР | 2009 |
|
RU2402795C1 |
| СПОСОБ ЛАЗЕРНОЙ ОБРАБОТКИ МАТЕРИАЛОВ И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1628365A1 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |



Использование: в приборостроении, для автоматического управления лучом при восприятии и обработке оптической информации. Сущность изобретения заключается в том, что устройство содержит оптический квантовый генератор, блок программного управления, блок фоторегистратора, одну или две видеокамеры, блок синхронизации, электропривод, электронно-оптические преобразователи со световодом, видеомагнитофон и телевизионная установка, электропривод с блоком программного управления выполнены в виде трехканальной цифроаналоговой комбинированной следящей системы, включающей сдвоенную лазерную головку системы управления с обзором, близким к сферическому, и механизмом поворота оптических элементов по трем осям. 4 ил.
СКАНИРУЮЩАЯ СИСТЕМА, содержащая цилиндрический корпус, в котором установлен отражательный элемент в виде зеркала в оправе, соединенный через механизм поворота с электроприводом, отличающаяся тем, что, с целью расширения функциональных возможностей за счет увеличения пространства сканирования и повышения точности путем исключения "мертвой" зоны, в нее введена система управления электроприводом, выполненная в виде трехканальной следящей сервосистемы, состоящей из блока программного управления и головки системы управления, выполненной сдвоенной и включающей в каждой половине три канала управления, каждый из которых содержит последовательно соединенные первый сумматор, цифроаналоговый преобразователь, второй сумматор, усилитель и двигатель-генератор, первый выход которого соединен с вторым входом блока суммирования, а второй выход - с редуктором, выход которого соединен через механизм поворота с оправами линз и зеркала, также введены светоделитель на выходе управляемого источника излучения, оптически соединенный с введенной линзой и зеркалом каждой половины головки системы управления, в каждую половину головки системы управления введены механизм поворота линзы, установленной в кардановом подвесе, толкатель рамки карданового подвеса линзы, выполненной с двумя связанными с оправой линзы осями, установленными в двух шлицах стойки головки системы управления с возможностью перемещения, и привод толкателя рамки карданового подвеса линзы, а также в систему введены блок синхронизации, первый, второй и третий выходы которого соединены с управляемым источником излучения, с входами введенных фоторегистратора и видеокамеры соответственно, причем первый, второй и третий выходы блока программного управления соединены с входами первых сумматоров первого, второго и третьего каналов управления каждой половины головки системы управления соответственно, дополнительные выходы блока программного управления соединены с входом блока синхронизации и с приводом толкателя рамки карданового подвеса линзы каждой половины головки системы управления, выходы каждого канала управления каждой половины головки системы управления соединены с входами введенного видеомагнитофона через соответствующие введенные аналого-цифровые преобразователи.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сканирующее устройство кругового обзора | 1982 |
|
SU1076860A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
