Изобретение относится к геодезическим изысканиям, в частности к способам расстановки насосных станций на магистральных трубопроводах с помощью транспортных средств, 5 движущихся вдоль профиля, подлежа- щего трассированию, и может применяться в нефтехимической промьштенностй при прокладке трубопровода для перекачки топлива, а также во всех от- 10 раслях народного хозяйства, где трай:nopTHpjTOT ч жидкости или материалы по магистральным тру бопроводам.
Известен способ определения раст стояний и высот по ,топографической 15 карте Си.
0; |нако этот способ не позволяет измерять все требуемые параметры.
Наиболее близким к изобретению по технической сущности является 20 графический способ определения расстояния между насосными станциями на трассе трубопровода с помощью гидравлического треугольника и профиля трассы., .25
Гидравлический треугольник получают в результате гидравлического расчета трубопровода по известным зависимостям. Он заключается в опре- делении потерь напора по длине тру- зо бопровода при перекачке горючего или определении линии гидравлического уклона.
Напор насосной станции расходуется на преодоление сопротивления 35 движению горйчего по длине трубопро;вода ина преодоление разности высот между начальным и конечным пунктами,.
Гидравлический треугольник строится в том же масштабе, что и профиль 40 трассы. Вертикальный катет треугольника численно равен максимальному напору в I м ст. жидкости насосной станции при заданной производительности. Горизонтальньй катет треуголь- З ника численно равен расс-гоянию между насосными станциями для горизонтального участка местности.
Профиль трассы вычерчивают на бумаге, снимая отметки высот с 50 топографической карты, на которую нанесена трасса трубопровода.
Для определения расстояния между насосными станциями НС-1 и HG-2 гидравлический треугольник наклады- 55 вают на профиль т)ассы так, что точ ка установки первой насосной станции и вершина прямого угла с вертикальным катетом гидравлического треугольника совпадают. Точка встречи гипотенузы гидравдического теуголх ника с профилем трассы определяет место установки второй насосной станции. Аналогично находят положение последующих насосных станций 2.
Однако известный способ непозволяет определить расстояние мезвду насосными станциями при отсутствии топографической карты, с помощью которой строится профиль трассы. За счет несовпадения данных о местности, имеющихся на карте, и фактических данных о местности возникает необходимость проведения повторных расчетов и разбивки трассы магистрального трубопровода, что приводи к дополнительным затратам времени и средств. Низкая точность в определении расстояния между насосными станциями возникает за счет ошибок при дикетировании трассы и погрешности используемого измерительного инструмента, ошибок масштабирования -пед- равлического треугольника (уменьшение напора,развиваемого насосной станцией, в 2000 раз, а расстояние между насоснь ми станциями в 50000 раз).
Кроме того, определять расстояние между насосными станциями непосредственно на трассе трубопровода известным способом невозможно, так как он предполагает предварительную разведку трассы магистрального трубопровода, обработку данных и повторный выезд на трассу с данными расчетов.
Цель изобретения - повышение точности способа путем исключения погрешностей масштабирования и съема высот с карты, а также возможности прове,цеиия работ при отсутствии
карт. I
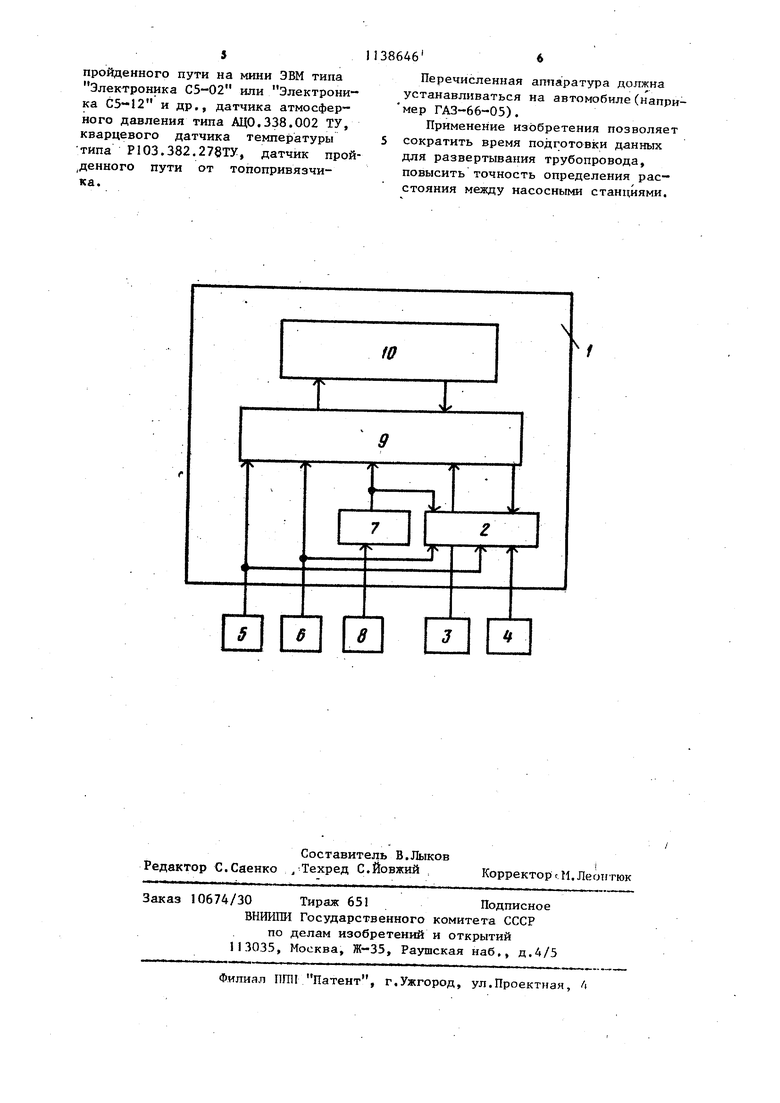
Поставленная цель достигается тем, что согласно способу определени расстояния между насосными станциями магистрального трубопровода в начальной точке измеряют температуру и давление окружающей среды, при движении измерительного устройства по трассе магистрального трубопровода непрерывно измеряют пройденный путь, температуру и давление окружающей среды, а расстояние между насосными станциями магистрального трубопровода принимают равным пройденному измерительным устройством пути в момент выполнения равенства 18443,6 fH-oit, Ь где S - пройденный измерительным устройством путь; S - заданное расстояние между насосными станциями для горизонтального участка; температурный коэффициент расширения воздуха; lilH-- среднее значение пературы воздуха в на чальной и текущей точ ках; и Р;. атмосферное давление в начальной и текущей точках; 3 аданный.напор, р азви ваемый насосной стан цией. На чертеже представлен вариант блок-схемы устройства для реализации предлагаемого способа. Устройство состоит из мини ЭВМ 1 пульта 2 управления и сигнализации, задатчика 3 1)асчетного расстояния между насосными станциями, задатчи,ка 4 напора, развиваемого насосной станцией при заданной производитель ности, датчика 5 атмосферного давле ния, датчика 6 температуры воздуха, счетчика 7 пройденного пути,Гда чйка 8 пройденного пути, интерфейса 9, процессора 10, Пульт 2 зп1равления и сигнализаци служит Для ручного -вводаинформации в вычислитель, а также для выполнения профилактических ;работ и установки различных режимов работы процесс ра. Он также позволяет осуществлять контроль за состоянием работы интер фейса и процессора. Штерфейс 9 осзпцествляет связь с оперативным запоминающим устройство и внешними устройствами. Процессор 10 (вычислитель) основное устройство служит - для автоматического выполнения последовательности операций, предусмотренн программой решения з.адачи, Способ осуществляется следукщим образом. В начале трассы, т.е. в месте размещения первой насосной станции, ЭВМ 1 устанавливают в исходное сост тем6464яние. Затем с помощью пульта 2 управления и сигнализации в ЭВМ от задатчиков 3 и 4 заносят расчетное значение расстояния между насосными станциями и напор, развиваемый насосной станцией. Через пульт 2 в ЭВМ 1 заносят также от датчика 5 атмосферное давление и от датчика 6 - температуру воздуха. Счетчик 7 пройденного пути устанавливают в положение О. В процессе движения сигнал-от датчика 8 пройденного пути поступает на счетчик 7. С пульта 2 осуществляют пуск устройства и одновременно начинают движение по заданной трассе трубопровода от пункта А до пункта В. В интерфейс автоматически от датчиков 5, 6 и 8 (атмосферного давления, температуры воздуха, пройденного пути) по программе,задаваемой процессором, заносится информация. Процессор 10 ведет обработку полученных данных по расчетной формуле 18443,6 (, В продессе движы1ия пройденный путь S возрастает от нуля до значения, при котором он сравнится с правой частью уравнения, в которой величины Р, t меняют свое значение. В момент равенства величины S и правой части уравнения на пульт управления выдается световой и звуковой сигналы, по которым фиксируют место установки насосной станции НС-2 на трассе магистрального трубопровода. В этом месте счетчлк 7 опять устанавливают в нуль и снова заносят значение атмосферного давле- 1 от датчика 5, а от датчика ния Р, значение температуры воздуха t Далее процесс повторяется. Физически момент равенства пути правой части уравнения означает, что напор, создаваемый насосной станцией, израсходован на преодоление расстояния и разности высот между пунктами, в которых установлены первая и вторая насосные станции. Способ может быть реализован с помощью серийно вьптускаемых средств: процессора, интерфейса, пульта управления и сигнализации, счетчика
пройденного пути на мини ЭВМ типа Электроника С5-02 или Электроника С5-12 и др., датчика атмосферного давления типа АЦО.338.002 ТУ, кварцевого датчика температуры типа РЮЭ.382.278ТУ, датчик прой денного пути от топопривязчика.
Перечисленная аппаратура должна
-.
устанавливаться на автомобиле(например ГАЗ-66-05).
Применение изобретения позволяет сократить время подготовки данных для развертывания трубопровода, повысить точность определения расстояния между насосными станциями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения насосной станции монтируемого трубопровода | 1986 |
|
SU1515042A1 |
| Устройство для определения расстояния между насосными станциями | 1986 |
|
SU1364874A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ НАСОСНЫМИ СТАНЦИЯМИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2001 |
|
RU2206065C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ УСТАНОВКИ НАСОСНЫХ СТАНЦИЙ НА ТРАССЕ СБОРНО-РАЗБОРНОГО НЕФТЕПРОДУКТОПРОВОДА | 2017 |
|
RU2664871C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕКАЧКОЙ ЖИДКОСТИ ПО ТРУБОПРОВОДУ | 2013 |
|
RU2520802C1 |
| СПОСОБ СТРОИТЕЛЬСТВА НАЗЕМНОГО МЕТАЛЛИЧЕСКОГО СБОРНО-РАЗБОРНОГО НЕФТЕПРОДУКТОПРОВОДА | 2010 |
|
RU2439415C1 |
| МАГИСТРАЛЬНЫЙ ТРУБОПРОВОД ДЛЯ ТРАНСПОРТИРОВКИ ЖИДКИХ УГЛЕВОДОРОДОВ С МОРСКОЙ ТЕХНОЛОГИЧЕСКОЙ ПЛАТФОРМЫ | 2010 |
|
RU2428620C1 |
| Способ обнаружения утечек в трубопроводах автоматизированной закрытой оросительной системы и устройство для его осуществления | 1985 |
|
SU1372114A1 |
| Способ подачи воды | 2021 |
|
RU2780237C1 |
| СПОСОБ И КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ (КСБ) ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2392133C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯ,НИЛ МЕЖДУ НАСОСНЫМИ СТАНЦИЯМИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА, отличающийся тем, что, с целью повышения его точности путем исключения погрешностей масштабирования и съема высот с карты, в начальной точке измеряют температуру и давление окружаннцей среды, при движении измерительного устройства по трассе магистрального трубопровода непрерыв но измеряют пройденный путь, температуру и давление окружающей среды. а расстояние между насосными станциями магистрального трубопровода принимают равным пройденному измерительным устройством пути в момент выполнения равенства р, i8K3,6(i-oit p.je р. 5 5«И-I микс Н где S - пройденный измерительным устройством путь; SP - заданное расстояние между насосными станциями для горизонтального участка; оС - температурный коэффициент расширения воздуха; . -среднее значение темпе-ср (Л ратуры йоздуха в начальной-; и текущей точках; Р и Р. атмосферное давление в начальной и текущей точках; MOIKC заданный напор, развиН оо ваемый насосной станци00 ей. сп 4 О)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., 1983, с,9-12 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Руководство по эксплуатации полевых магистральных трубопроводов. | |||
| М., Воеицое издательство МО СССР, 1973, с.58-691 рототип) | |||
