Изобретение относится к трубопроводному транспорту, в частности, к автоматизированным способам с использованием спутниковой навигации при инженерной геодезии трассы трубопровода и может найти применение в период развертывания сборно-разборных нефтепродуктопроводов (СРНПП), преимущественно в случаях, когда необходимо определить места установки насосных станций (НС) на трассе нефтепродуктопроводов, состоящих из секционных трубопроводных модулей с быстроразъемным раструбным соединением.
Из практики известно, что для определения местоположения (географических координат и высоты) и времени, а также параметров движения (скорости и направления движения и т.д.) для наземных, воздушных, водных и космических объектов используют спутниковую систему навигации (ГНС ГЛОНАСС), представляющую собой комплексную электронно-техническую систему, состоящую из совокупности наземного и космического оборудования (Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Навигационный радиосигнал в диапазонах L1, L2 (редакция 5.1). - М.: ОАО «НИИ КП», 2008, с. 28) [1]. В соответствии с постановлением Правительства РФ от 25 августа 2008 года №641 «Об оснащении транспортных, технических средств и систем аппаратурой спутниковой навигации ГЛОНАСС или ГЛОНАСС/GPS» возникла необходимость использовать эту систему при развертывании СРНПП.
Используемые для развертывания СРНПП трубопроводные модули с соединением «Раструб» представляют собой трубу длиной 6 метров и диаметром 100-150 мм, имеют быстроразъемное соединение в виде манжеты с уступом для упора запорного кольца на одном конце модуля и раструба - на другом конце (РФ патент №41505 F16L 9/02).
Перед авторами стояла задача разработать способ определения местоположения НС на трассе СРНПП с заданной точностью координат мест их установки с использованием спутниковой системы ГЛОНАСС.
При просмотре источников патентной и научно-технической информации было выявлено относительно широкое использование ГЛОНАСС технологий. Так, известен способ контроля положения трубопроводов надземной прокладки, в котором, в процессе эксплуатации трубопровода, с помощью мобильных ГЛОНАСС-приемников осуществляют контрольные измерения координат деформационных марок, характеризующих текущее планово-высотное положение трубопровода, передают данные измерений на сервер и строят текущую цифровую модель трубопровода. По результатам сравнения с проектной цифровой моделью определяют участки, на которых отклонение текущего положения от проектного превышает допустимые значения (РФ патент №2582428 F17D 5/00).
Известен также способ определения положения подземного трубопровода, который включает пропуск внутритрубного инспектирующего прибора с навигационной системой внутри трубопровода, регистрацию и запись параметров движения, вычисление координат оси трубопровода в наземном пункте обработки (РФ патент №2527902 F17D 5/00, G01C 21/00).
Указанные способы относятся к способам контроля за уже действующими сложными технологическими комплексами, характеризующимися установкой многочисленного оборудования (деформационных марок, глубинных реперов, референцных станций и др.) для привязки к местной системе координат. В описании этих способов отсутствует информация о начальном этапе определения мест расстановки оборудования, в частности, НС на проектируемой трассе трубопровода.
Аналогом заявляемого способа является известный способ определения расстояния между НС, в котором в начальной точке измеряют температуру и давление окружающей среды, при движении измерительного устройства по трассе магистрального трубопровода непрерывно измеряют пройденный путь, температуру и давление окружающей среды, а расстояние между насосными станциями трубопровода принимают равным пройденному измерительным устройством пути в момент выполнения расчетного равенства по измеряемым и заданным параметрам, таким как заданное расстояние между НС, температурный коэффициент расширения воздуха, среднее значение температуры воздуха в начальной и текущей точках, давление окружающей среды в начальной и текущей точках, заданный напор НС (СССР а.с. №1138646, G01C 7/04).
Недостатком способа является значительная погрешность при размещении НС с приводом насоса от двигателя внутреннего сгорания на местности со сложным рельефом, так как не учитывается падение мощности двигателя НС в зависимости от абсолютной высоты ее размещения относительно уровня моря. Кроме того, в нем не предусматривается автоматическое сохранение данных о профиле трассы и для выполнения требования по точности определения точек расстановки НС требуется возвращение на начальный пункт и повторный проезд по трассе трубопровода, что значительно удлиняет период его создания.
Наиболее близким по технической сущности к изобретению и взятым за прототип является способ определения расстояния между насосными станциями магистрального трубопровода, предусматривающий измерение в начальной точке температуры и давления окружающей среды, движение измерительного устройства по трассе магистрального трубопровода и непрерывное измерение пройденного пути, температуры и давления окружающей среды, а также измерение абсолютной высоты относительно уровня моря любой точки трассы, начиная с точки установки первой НС. Расстояние между НС принимают равным пройденному измерительным устройством пути от предыдущего места установки НС до точки, в которой измерительное устройство выдает сигнал об израсходовании заданного напора НС на преодоление этого отрезка пути (выполнение расчетного равенства по измеряемым и заданным параметрам осуществляется процессором) (РФ патент №2206065 G01C 7/04 - прототип).
Недостатком способа-прототипа является значительная погрешность фиксации координат места установки НС, обусловленная тем, что подвижное измерительное устройство не всегда может перемещаться по заданному пути из-за наличия различных препятствий естественного и искусственного характера (преодоление водной преграды, пересечение железной и автомобильной дороги, обход населенного пункта, промышленных объектов и др.). Неточности и ошибки в определении мест установки НС приводят к снижению технических возможностей трубопровода в период его эксплуатации (по опыту эксплуатации допущенные ошибки при определении мест установки НС могут снизить производительность СРТ на 10-20%).
Технический результат изобретения - повышение точности и достоверности определения мест установки НС на фактической трассе нефтепродуктопровода без снижения требования по обеспечению его заданной суточной производительности и, как следствие, повышение эффективности эксплуатации СРНПП.
Указанный технический результат достигается тем, что в автоматизированном способе определения мест установки насосных станций на трассе сборно-разборного нефтепродуктопровода, включающем задание общей протяженности трассы нефтепродуктопровода, геодезических высотных отметок точек начального пункта, который принимают за место установки первой НС, и конечного пункта трубопровода, максимального напора предполагаемых к использованию НС, после чего, продвигаясь по трассе СРНПП на подвижном средстве с установленным на нем программным блоком обработки данных, определяют координаты точки установки НС, которые фиксируют в момент израсходования заданного максимального напора НС на преодоление единичного участка трассы с учетом разности геодезических высотных отметок начала и конца этого участка, согласно изобретению, дополнительно задают суточную производительность СРНПП, плотность и кинематическую вязкость нефтепродукта, подлежащего транспортированию по СРНПП, внутренний диаметр используемых трубопроводных модулей СРНПП, мощность, коэффициент полезного действия и коэффициент использования напора предполагаемой к использованию НС, на подвижное средство устанавливают навигационную аппаратуру потребителей сигналов ГЛОНАСС, с помощью которой при движении по трассе замеряют текущие геодезические высотные отметки точек фактической трассы, которые передают в программный блок обработки данных, осуществляют корректировку профиля трассы и координат точек установки НС, а при достижении конечного пункта нефтепродуктопровода определяют необходимое количество НС, для каждой из которых фиксируют оптимальную величину подачи и напора, обеспечивающих заданную суточную производительность СРНПП.
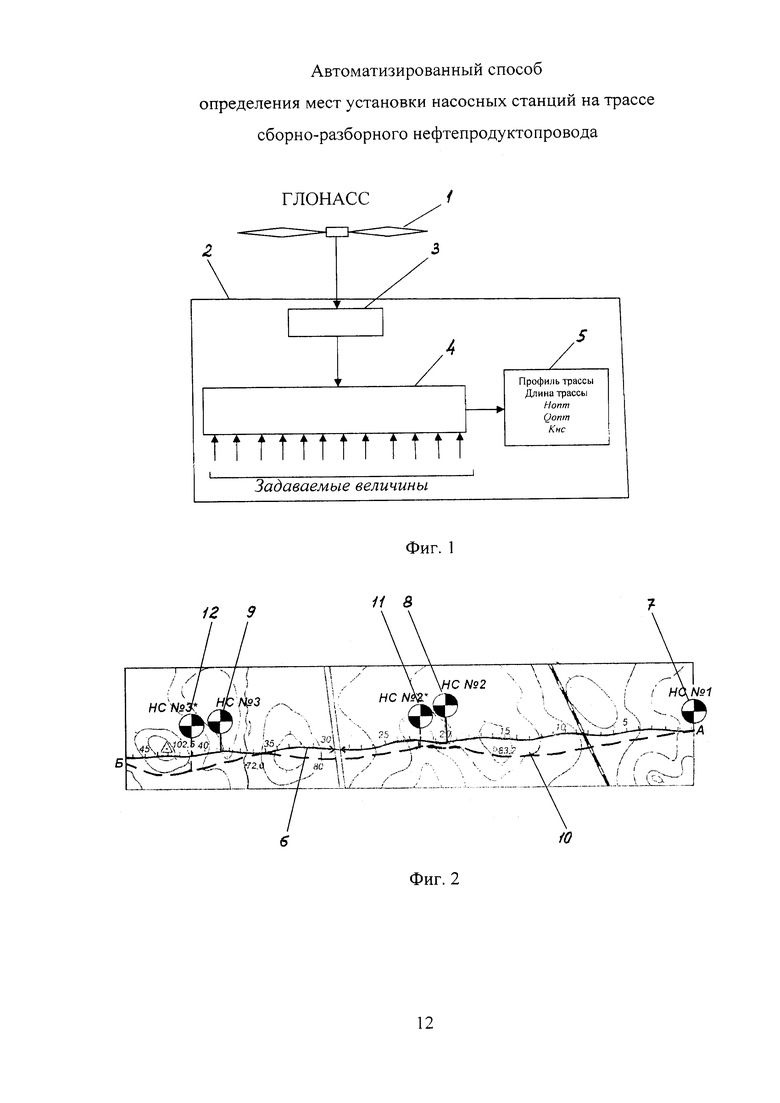
На фиг. 1 представлена блок-схема автоматизированной системы, реализующей автоматизированный способ определения мест установки НС на трассе СРНПП;
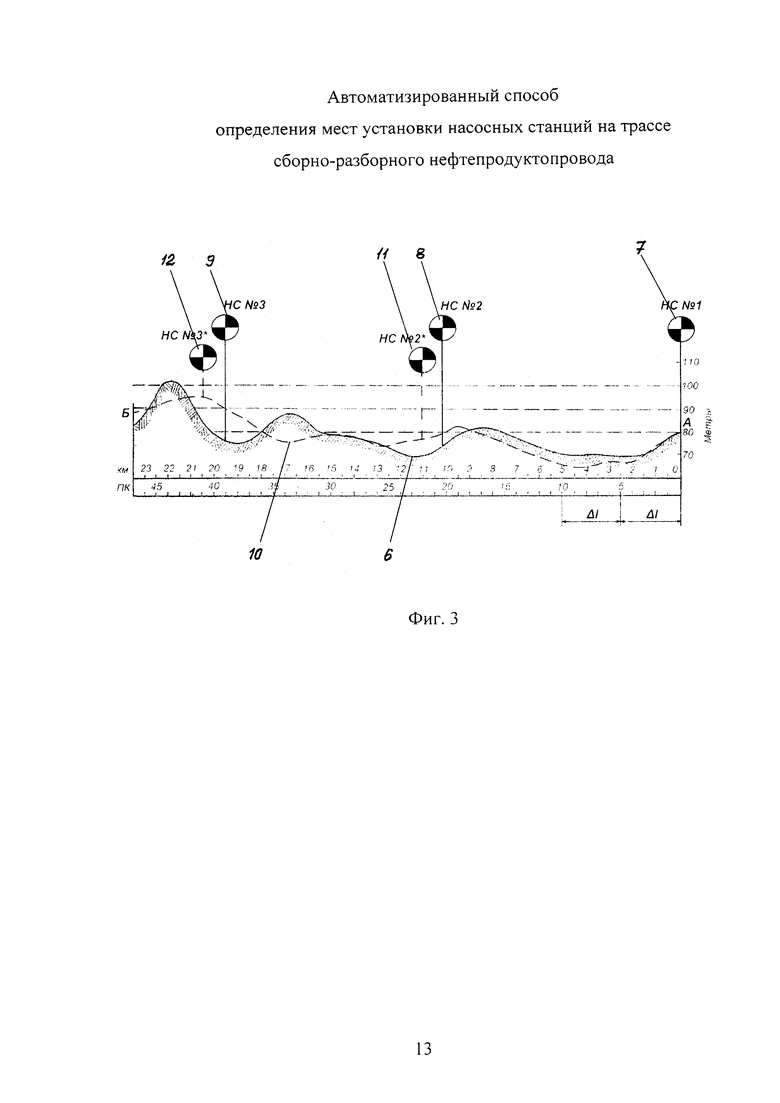
фиг. 2 - фрагмент карты, на которой отображена в плане трасса нефтепродуктопровода от точки А до точки Б (сплошная линия -составлена с использованием топографической карты с указанием расчетных мест установки НС, пунктирная линия - фактическая трасса, скорректированная с использованием заявляемого способа);
фиг. 3 - то же (фиг. 2 в разрезе с указанием профиля трассы).
Блок-схема автоматизированной системы, реализующей способ определения мест установки НС, содержит спутниковую систему навигации 1 ГЛОНАСС [1] (используется не менее трех спутников), подвижное средство 2 (любой автомобиль высокой проходимости, бронемашина и др.), на котором размещена навигационная аппаратура потребителей 3 (НАП) сигналов ГЛОНАСС 1 (как вариант аппаратура спутниковой навигации «Грот-В»14Ц821) (Навигационная аппаратура потребителей ГЛОНАСС/GPS. - М.: ОАО «НИИ КП», 2011. - с. 5), программный блок 4 обработки данных (как вариант персональный или планшетный компьютер), устройство 5 отображения информации о выходных параметрах (монитор).
Для удобства пояснения реализации способа введены следующие условные обозначения:
Задаваемые показатели:
- Q - суточная производительность СРНПП, т/сут;
- ρ - плотность нефтепродукта, кг/м;
- ν - кинематическая вязкость нефтепродукта, м /с;
- d - внутренний диаметр модулей СРНПП, м;
- L - общая протяженность трассы СРНПП, км;
- начертание расчетной трассы нефтепродуктопровода в плане;
- hH, hk - геодезические высотные отметки точки начала (пункт А) и
точки конца (пункт Б) трассы СРНПП, м;
- N - мощность двигателя предполагаемой к использованию
насосной станции (по паспорту), л.с.;
- Hmax - максимальный напор предполагаемой к использованию
насосной станции (по паспорту), м;
- ηнс - коэффициент полезного действия насосной станции;
- βo - коэффициент использования напора;
- Δl - заданный единичный участок трассы нефтепродуктопровода,
на котором полностью используется максимальный напор предполагаемой к использованию НС, м.
Замеряемые показатели (поступают от НАП ГЛОНАСС):
- li (i=1- до n) - текущее расстояние перемещения подвижного средства от начальной точки установки НС №1 до точки установки НС №2 (и до каждой последующей точки установки НС на трассе), км;
- hj (j=1- до n) - высотные отметки текущих точек трассы, м.
Расчетные показатели (конечный результат):
- профиль фактической трассы СРНПП;
- координаты мест установки НС на фактической трассе;
- Lф - общая длина фактической трассы СРНПП, км
- Нопт - оптимальная величина напора НС, м;
- Qопт - оптимальная подача НС, м3/ч;
- Кнс - требуемое количество НС, шт.
Автоматизированный способ определения мест установки насосных станций на трассе сборно-разборного нефтепродуктопровода реализуется следующим образом.
Реализация заявляемого способа предусматривает подготовительный период, касающийся использования НАП 3 и определения предварительной трассы 6 от точки А до точки Б.
Подготовка НАП 3 системы ГЛОНАСС 1 к работе включает в себя: выбор необходимого языка интерфейса, системы географических координат и единиц измерения, а также настройку даты и временного пояса, синхронизированного с системным временем системы ГЛОНАСС 1 (Навигационная аппаратура потребителей ГЛОНАСС/GPS. - М.: ОАО «НИИ КП», 2011, 64 с.).
Используя топографическую карту и заданную протяженность трассы СРНПП от начального пункта А до конечного пункта Б в соответствии с известным гидравлическим расчетом (Середа В.В., Данильченко И.Г., Голеницкий А.И. Автоматизация расчета эксплуатационных режимов работы насосных станций полевого магистрального трубопровода. Труды 25 ГосНИИ МО РФ. Вып. 55. - М.: Гралия М, 2010, с. 515-526) получают расчетную трассу 6 (фиг. 2, 3), на которую наносят, исходя из заданной суточной производительности Q нефтепродуктопровода, необходимое количество НС на расчетном расстоянии друг от друга (точка А - НС №1 и далее по трассе - НС №2, НС №3 и т.д.). Полученную расчетную трассу 6 с нанесенными на ней точками установки НС 7, 8, 9 вводят в программный блок 4 обработки данных. Расчетная трасса 6 в программный блок 4 вводится в двух видах -в плане (фиг. 2) и в разрезе (фиг. 3) с указанием геодезических отметок контрольных точек (с топографической карты местности). Расстояние между НС на расчетной трассе 6 выбрано, исходя из израсходования максимального напора Hmax НС при движении по трассе.
В программный блок 4 обработки данных вводят (база данных) числовые значения параметров (задают), указанных выше (с. 6).
Перед началом движения средства 2 фиксируют с помощью НАП 3 геодезическую координату и абсолютную высотную отметку начального пункта 7 трубопровода (точка А), где установлена начальная НС №1.
НАП 3, установленная на подвижном средстве 2 и подключенная к программному блоку 4 обработки данных, постоянно находится на связи с системой ГЛОНАСС 1, что позволяет фиксировать время начала движения из точки А по трассе, которое заносится в программный блок 4.
С началом движения от начального пункта 7 расчетной трассы 6, в котором установлена НС №1 (точка А), подвижное средство 2, учитывая преодоление различных препятствий на местности, перемещается с отклонением от расчетной трассы 6 по фактической трассе 10. При перемещении по участкам Δl (как вариант длиной 500 м) реальной трассы 10 с НАП 3 в программный блок 4 постоянно поступают текущие значения пройденного расстояния lj и геодезических высотных отметок hj профиля трассы 10, в котором по заложенной в нем программе корректируют профиль трассы 6, места установки и координаты точек НС на фактической трассе 10 (фиг. 2, 3 НС №2*, НС №3*). Кроме того, с НАП 3 поступают текущие значения li, и hj, по которым в соответствии со специальной программой вычисляют текущий рабочий напор Нраб предполагаемой к использованию НС с учетом разности текущих высотных отметок. Значения напора Нраб, по заданной программе сравнивают с заданным максимальным напором Hmax и при достижении момента расходования максимального напора Hmax на преодоление конкретного отрезка пути фактической трассы 10, фиксируют место установки 11 НС №2*, которое принимают за начальную точку следующего участка пути.
При движении по последующим единичным участкам Δl, используя постоянно поступающие с НАП 3 системы ГЛОНАСС 1 текущие значения пройденного расстояния li, и геодезических высотных отметок hj, профиля трассы 10, и повторяя указанные выше действия и вычисления, определяют место установки 12 НС №3*, и так далее до конца фактической трассы 10. По достижении конечного пункта (точка Б) нефтепродуктопровода программный блок 4 вычисляет общую длину фактической трассы 10 Lф, количество НС Кнс, необходимое для обеспечения заданной производительности СРНПП, оптимальную величину напора Нопт и подачи Qопт каждой НС, которые поступают на устройство 5 отображения информации выходных параметров (монитор): профиль и длина Lф фактической трассы 10 нефтепродуктопровода на местности, количество Кнс НС и места их установки, оптимальные величины подачи Qопт и напора Нотп НС с учетом особенности местности. Конкретные алгоритмы программного обеспечения не рассматриваются подробно в данном описании, так как не относятся к сущности заявляемого изобретения.
Как видно из фиг. 2 и фиг. 3 точки установки НС на фактической трассе 10 не совпадают с расчетными точками на трассе 6, так как заявляемый автоматизированный способ учитывает рельеф, наличие водных преград, перепады высот, наличие дорог, степень проходимости местности, по которой осуществляется фактическое перемещение с использованием системы ГЛОНАСС, отличающейся высокой точностью и достоверностью.
Как показала практика, в реальных условиях отклонения могут в зависимости от масштаба карты и типа местности составить: по геодезической высоте - 10-20 м, по расстоянию - 500-1500 м.
Применение предлагаемого автоматизированного способа позволит более достоверно с высокой точностью проложить трассу СРНПП, построить ее профиль с учетом особенностей рельефа местности и обоснованно определить необходимое количество и местоположение НС на трассе, а также оптимальные режимы работы НС, что выгодно отличает его от прототипа.
Заявляемый способ определения мест установки НС при использовании его в известном способе строительства наземного металлического сборно-разборного нефтепродуктопровода (РФ патент №2439415 F16L 1/024) позволит значительно сократить время и трудозатраты, что в целом повысит эффективность эксплуатации СРНПП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем | 2023 |
|
RU2821670C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2012 |
|
RU2527902C2 |
| Устройство для определения положения насосной станции монтируемого трубопровода | 1986 |
|
SU1515042A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ НАСОСНЫМИ СТАНЦИЯМИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2001 |
|
RU2206065C1 |
| СПОСОБ СТРОИТЕЛЬСТВА НАЗЕМНОГО МЕТАЛЛИЧЕСКОГО СБОРНО-РАЗБОРНОГО НЕФТЕПРОДУКТОПРОВОДА | 2010 |
|
RU2439415C1 |
| Способ определения расстояния между насосными станциями магистрального трубопровода | 1983 |
|
SU1138646A1 |
| Способ геодинамического мониторинга за смещениями блоков верхней части земной коры и деформационного состояния земной поверхности с применением технологии высокоточного спутникового позиционирования глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС /GPS | 2019 |
|
RU2704730C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
Изобретение относится к трубопроводному транспорту, в частности к автоматизированным способам с использованием спутниковой навигации при инженерной геодезии трассы трубопровода, и может найти применение в период развертывания сборно-разборных нефтепродуктопроводов (СРНПП), преимущественно в случаях, когда необходимо определить места установки насосных станций (НС) на трассе нефтепродуктопроводов, состоящих из секционных трубопроводных модулей с быстроразъемным раструбным соединением. В заявляемом способе используют, продвигаясь по фактической трассе СРНПП на подвижном средстве, установленную на нем навигационную аппаратуру потребителей сигналов ГЛОНАСС с программным блоком обработки данных, в который введены, как база данных, расчетная длина трассы с ее геодезическими отметками, суточная производительность СРНПП и максимальный напор НС, предполагаемой к установке на трассе, получают на конечном пункте трассы скорректированные значения параметров: длина и профиль фактической трассы СРНПП, необходимое количество НС, оптимальные величины подачи и рабочего напора НС, обеспечивающих заданную производительность СРНПП. Технический результат - повышение точности определения мест установки НС на фактической трассе СРНПП без снижения требования по обеспечению его заданной суточной производительности и, как следствие, повышение эффективности эксплуатации. 3 ил.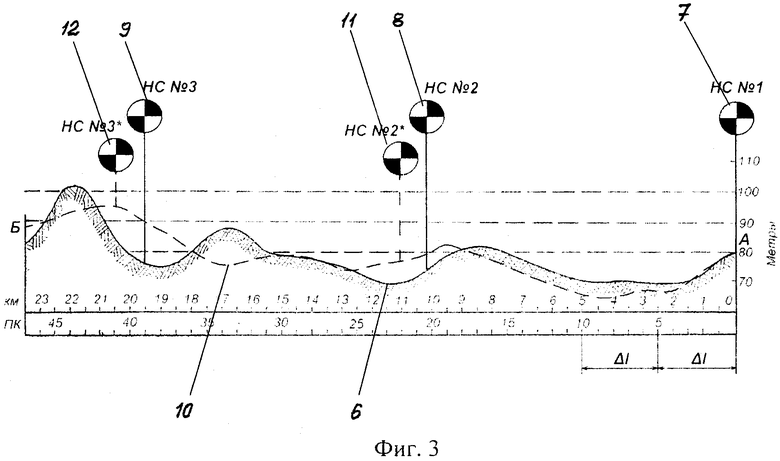
Автоматизированный способ определения мест установки насосных станций на трассе сборно-разборного нефтепродуктопровода, включающий задание общей протяженности трассы, геодезических высотных отметок точек начального пункта, который принимают за место установки первой насосной станции, и конечного пункта трубопровода, максимального напора предполагаемых к использованию насосных станций, после чего, продвигаясь по трассе сборно-разборного нефтепродуктопровода на подвижном средстве с установленным на нем программным блоком обработки данных, определяют координаты точки установки НС, которые фиксируют в момент израсходования заданного максимального напора НС на преодоление единичного участка трассы с учетом разности геодезических высотных отметок начала и конца этого участка, отличающийся тем, что дополнительно задают суточную производительность нефтепродуктопровода, плотность и кинематическую вязкость нефтепродукта, подлежащего транспортированию по нефтепродуктопроводу, внутренний диаметр используемых трубопроводных модулей нефтепродуктопровода, мощность, коэффициент полезного действия и коэффициент использования напора предполагаемой к использованию насосной станции, на подвижное средство устанавливают навигационную аппаратуру потребителей сигналов ГЛОНАСС, с помощью которой при движении по трассе замеряют текущие геодезические высотные отметки точек фактической трассы, которые передают в программный блок обработки данных, осуществляют корректировку профиля трассы и координат точек установки насосных станций, а при достижении конечного пункта трубопровода определяют необходимое количество насосных станций, для каждой из которых фиксируют оптимальную величину подачи и напора, обеспечивающих заданную суточную производительность сборно-разборного нефтепродуктопровода.
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ НАСОСНЫМИ СТАНЦИЯМИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2001 |
|
RU2206065C1 |
| Способ определения расстояния между насосными станциями магистрального трубопровода | 1983 |
|
SU1138646A1 |
| 0 |
|
SU153352A1 | |
| WO 2014189943 A1, 27.11.2014 | |||
| US 9720093 B2, 01.08.2017. | |||

