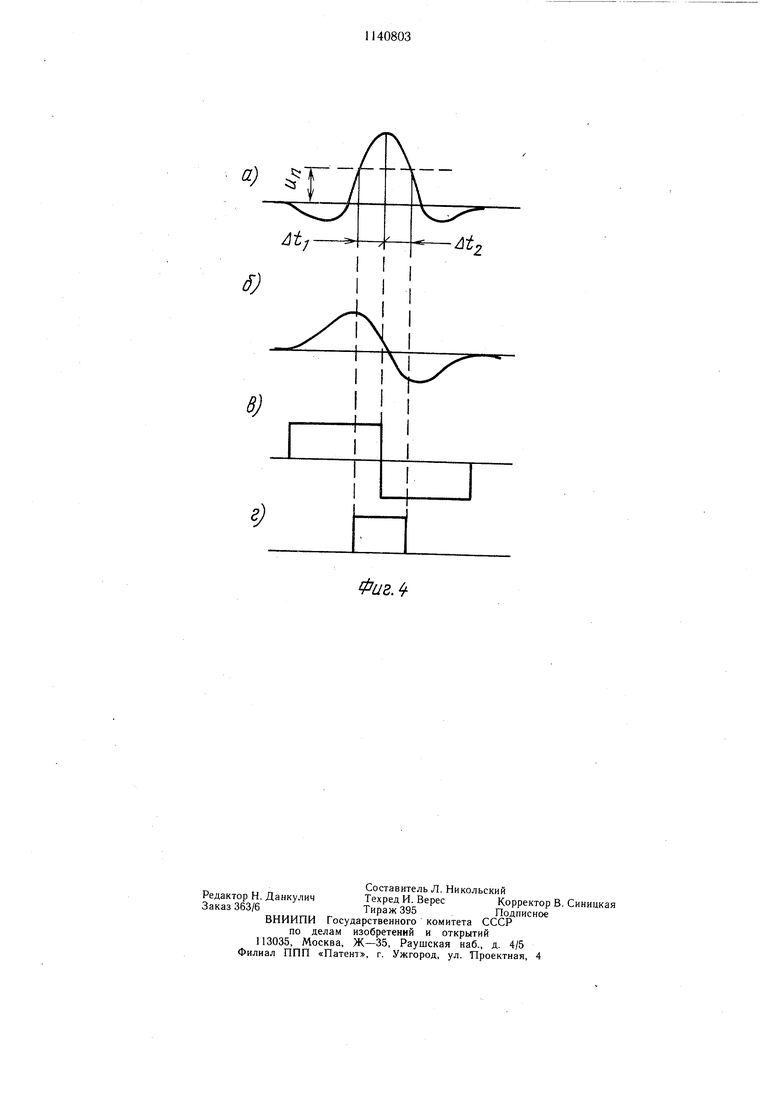
Изобретение относится к устройствам измерения параметров движения спортсменов и может быть использовано для определения положения спортсмена или некоторых спортивных снарядов относительно ряда контрольных точек траектории движения, а также для измерения средней скорости движения спортсмена на контрольных отрезках дистанции. Известно устройство фиксации положения спортсмена, содержащее петлевые приемные антенны, связанные через приемные устройства, и блок измерения с блоком индикации и передатчик со средством крепления на спортсмене 1. Недостатком известного устройства является низкая точность измерения при неконтролируемом изменении ориентации оси передающей рамочной антенны, на которую работает передатчик, закрепленный на спортсмене. Цель изобретения - повыщение точности фиксации положения. Поставленная цель достигается тем, что устройство фиксации положения спортсмена, содержащее петлевые приемные антенны, связанные через приемные устройства, и блок измерения с блоком индикации и передатчик со средством крепления на спортсмене, имеет пороговые элементы и блоки оценки амплитуды, выходы которых подключены к дополнительным входам блоков измерения, а входы через пороговые элементы - к выходам приемных устройств, а петлевые приемные антенны выполнены в виде двух последовательно соединенных и разнесенны.х в плоскости петель. Кроме того, блок измерения содержит электронные схемы, каждая из которых имеет компаратор, дифференциатор, нулькомпаратор, тактовый генератор, схему И, триггер, реверсивный- счетчик и регистр, входы которого соединены с разрядными входами реверсивного счетчика, вход R которого соединен с выходом триггера, вход счета на сложение соединен с выходом схемы И, один из входов которой соединен с входом триггера и выходом компаратора, а другой ее вход подключен к выходу тактового генератора, а вход счета на вычитание реверсивного счетчика через нуль-компаратор соединен с выходом дифференциатора, вход которого соединен с одним из входов компаратора, причем первые входы компараторов электронных схем являются основными входами блоков измерения, а вторые их входы подключены к блокам оценки амплитуды. На фиг. 1 представлена .структурная схема устройства фиксации положения; на фиг. 2 - форма сигнала в приемных антеннах при равномерном перемещении относительно них объекта, несущего передатчик, работающий на рамочную передающую антенну, ось которой отклонена на некоторый угол У от нормали к плоскости приемной антенны. Кривая 1 на фиг. 2 соответствует вертикальной оси передающей рамки (Г 0). Такое положение передающей антенны, в указанных случаях поясной и корпусной передающих антенн является наиболее вероятным. Кривые 2 и 3 соответствуют некоторым углам TTj и Уг причем Tj TI ; на фиг. 3 - функциональная схема части блока измерения, осуществляющая выделение сиг налов от основной и дополнительной приемных антенн и вычисление характеристи ки асимметрии сигнала основной приемной антенны, на фиг. 4 - временные диаграммы работы схемы. В состав устройства входят разнесенные в горизонтальной плоскости основные 1 и дополнительные 2 петлевые антенны, последовательно подключенные к входам соответствующих приемных устройств 3. Выходы приемных устройств 3 соединены с блоками 4 оценки амплитуды и блоком 5 измерения. Выходы б.токов 4 оценки амплитуды соединены с пороговыми элементами 6, подключенны.ми, в свою очередь, к блоку 5 измерения, связанному с блоком 7 индикации. Спортсмен 8 с размещенным на нем передатчиком 9, работающим на передающую ра.мочную. антенну, перемещается относительно проводов приемных антенн 1 и 2. Устройство работает следующим образом. Нри вертикальной ориентации оси передающей антенны (кривая 1 на фиг. 2) сигнал в приемных антеннах 1 или 2 при .перемещении относительно них спортсмена 8 представляет собой четную функцию времени при равномерном движении объекта, т.е. является симметричным относительно точки , соответствующей положению передающей антенны над центром соответствующей приемной антенны, где достигается максимум амплитуды сигнала. Указанное предположение о равномерности движения объекта, как правило, соответствует реальности, поскольку рассматривается лищь небольщой интервал времени, когда спортсмен находится в окрестности приемной антенны, и скорость его на этом- интервале не может существенно измениться. Поскольку положение максимума сигнала в приемной антенне в этом случае всегда соответствует положению спортсмена над центром приемной антенны, то
измеряя положение максимума сигнала, можно зафиксировать положение спортсмена относительно центра приемной антенны.
Если ось передающей рамочной антенны при движении объекта в районе какой-либо из приемных антенн нак 1онена по отношению к нормали на некоторый .угол Т , то форма сигнала искажается. Это проявляется в смещении положения максиму.ма сигнала относительно точки t Со, соответствующей положению передающей антенны над центро.м приемной. Смещение составляет некоторую величину дС зависящую от-угла Т. Расчеты показывают, что уже при угле наклона оси передающей антенны максимум сигнала наблюдается в точке, отстоящей от центра приемной антенны на величину, 0,14h(h - высота передающей антенны над плоскостью приемной), что представляет собой весьма существенную ощибку при фиксации положения объекта по максимуму сигнала в приемной антенне.
Кроме того, при наличии угла У появляется аси.мметрия формы сигнала относительно максимума (фиг. 2). Эта асимметрия используется в предлагаемо.м устройстве для коррекции результатов фиксации положения объекта по максимуму сигнала в приемной антенне. Осуществляется это следующим образом.
Провода приемны.х антенн 1 и 2 уложены таким образом, что при своем перемещении спортсмен 8 проходит вначале над проводами дополнительной приемной антенны 2, а затем основной 1. Центр основной антенны 1 совпадает с соответствующей контрольной точкой беговой дистанции спортсмена 8, а дополнительная антенна 2 располагается в непосредственной близости от основной, но на некотором удалении от нее, достаточном для различия сигналов в обеих антеннах. Требование близости расположения антенн вытекает из необходимости получения идентичных параметров сигналов в них, что может не выполняться при значительном отличии свойств полупроводящей поверхности, на которую укладываются провода антенн.
Сигнал дополнительной приемной антенны 2 усиливается приемным устройством 3, выходной сигнал которого поступает на блок 4 оценки амплитуды и блок 5 измерения. По измеренной в блоке 4 оценки амплитуды амплитуде сигнала в пороговом элементе 6 устанавливается некоторый пороговый уровень Un по отноцгению к .максимальному значению сигнала. Этот пороговый уровень Un далее
используется в блоке 5 измерения для вычисления характеристик асимметрии сигнала, принимаемого основной приемной антенной 1, который, появляется на выходе приемного устройства 3 вслед за сигналом дополнительной антенны 2.
Блок 5 измерения осуществляет следующие операции: измерение временного положения максимума сигнала в основной приемной антенне 1; измерение характеристики асимметрии этого сигнала MZ, определяемой как разность временных интервалов между -моментами пересечения порогового уровня Un ( t на фиг. 2) и положением максимума сиг5 нала; коррекцию временного положения максимума сигнала. Коррекция положения максимума сигнала предполагает вычитание из значения, соответствующего положению максимума, поправки йТ, равной смещению максимума относительно
0 точки СЬ , представляющей собой момент истинного положения объекта над центром приемной антенны 1.
При известном пороговом уровне Un асимметрия сигнала в приемной антенне 1,
5 равная Д t-i- Atj, зависит только от угла наклона Т оси передающей антенны. Таким образом, измерив Atj-ui, тем самым можно оценить величину. угла У. С другой стороны, смещение максимума сигнала Д при каждом значении угла У
0 известно из соответствующих расчетов. Таким образом, существует однозначное соответствие между характеристикой Д tj Д t и смешением д , представляющее собой некоторую функцию (,дtl -
5 )
В блоке 5 измерения по измеренному значению dtt-MZ может быть вычислена поправка Af. Как показывает анализ, функция дТ (Д11-Д1г.) весьма
близка к линейной, поэтому вычисление без существенных потерь в точности может быть осуществлено путем умножения величины MI -д на соответствующий коэффициент пропорциональности. Другой
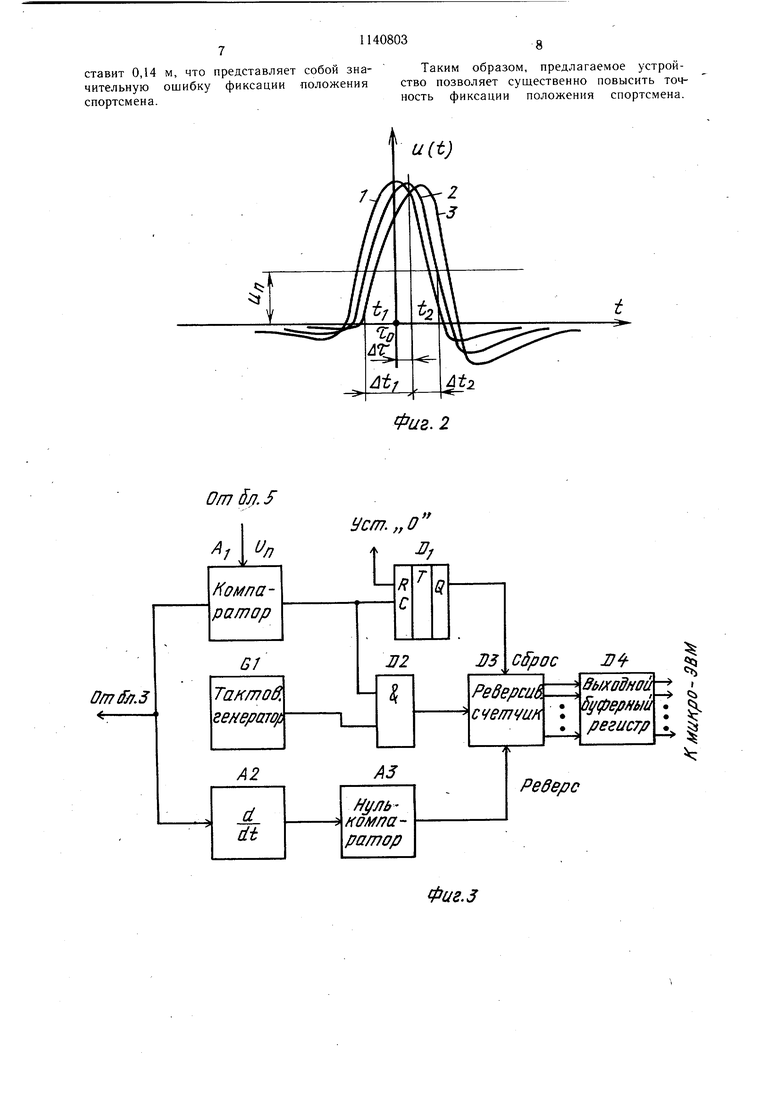
5 возможный путь определения поправки А заключается в составлении таблицы значений At в зависимости от и записи данных этой таблицы в постоянное запоминающее устройство (ПЗУ). Далее при подаче на вход ПЗУ значения &it- Д tx на выходе его получаем соответствующую поправку д Вычисленная поправка Л вычитается в блоке измерения 5 из числа, соответствующего временному положению максимума сигнала. Знак ДС определяется направлением оси передающей антенны относительно нормали к плоскости приемной антенны, и поэтому в зависимости от этого направления поправка д вводится авто1матически с нужным знаком. Таким образом определяется значение о , представляющее собой момент нахождения объекта над центром приемной антенны 1, независимо от угла наклона оси передающей рамочной антенны. Значение отображается на блоке 7 индикации. Часть блока 5 измерения, осуществляющая разделение сигналов от основной I и до толнительной 2 приемных антенн и вычисление характеристики асимметрии сигнала t - t , может быть выполнена в соответствии с функциональной схемой, представленной на фиг. 3. Блок измерения содержит электронные схемы, каждая из которых имеет (фиг. 3) компаратор А1, дифференциатор А2, нулькомпаратор A3, тактовый генератор G1, схему И D2, триггер D1, реверсивный счетчик D3 и регистр D4. Приведенная схема представляет собой миллисекундомер, выполненный на реверсивном двоичном счетчике D3, подсчитывающем импульсы тактового генератора G1 следующие с периодом 1 мс, и содержащий цепи управления от сигналов приемного устройства 3 и порогового элемента 6 (фиг. 1). Счетчик D3 через выходной буферный регистр Р4 связан с микро-ЭВМ, которая вычисляет поправку д€ в соответствии с приводимым алгоритмом. Схема работает следующим образом. От приемного устройства на схему поступают сигналы основной 1 и дополнительной 2 приемных антенн, разделенные во времени. Эти сигналы подаются на ком паратор А1 и дифференциатор А2. (фор.ма сигналов иллюстрируется на фиг. 4а). Компаратор А1 вырабатывает сигнал (фиг. 4г) при достижении этими сигналами порогового уровня Ufi, устанавливаемого в прогово.м элементе 6. Сигнал с выхода компаратора А1 поступает на счетный вход С триггера D1 и на схему И D2. При включении устройства триггер D1 всегда устаналивается в исходное состояние сигналом «Установка в «О. При поступлении с приемного устройства первого из сигналов (это всегда сигнал дополнительной приемной антенны) триггер D1 вырабатывает сигнал «Сброс на реверсивный счетчик- D3. Этим сигналом обнуляется показание счетчика (результат предыдущего измерения или случайное число возцикщее при включении питания). При наличии сигнала «Сброс сигналы на остальных входах счетчика не меняют его состояния. При поступлении с приемного устройства 3 второго сигнала (от основной приемной антенны) компаратор А1 вырабатывает сигнал, меняющий состояние триггера D1, при этом сигнал «Сброс с реверсивного счетчика D3 снимается. Одновременно компаратор А1 подает сигнал на схему «И D2, и через нее на счетчик D3 поступают тактовые импульсы от тактового генератора G1. Сигнал приемного устройства 3 подается одновременно на дифференциатор А2, вырабатывающий сигнал, показанный на фиг. 46. Этот сигнал поступает на нулькомпаратор A3, вырабатывающий сигнал реверса для реверсивного счетчика D3 (фиг. 40). Пока сигнал на выходе нулькомпаратора A3 больще нуля, счетчик D3 работает как суммирующий, если сигнал на выходе A3 меньше нуля, счетчик D3 начинает работать на вычитание. Как следует из приведенных на фиг. 4 временных диаграмм, направление счета счетчика D3 меняется в момент, когда сигнал на выходе приемного устройства 3 достигает максимума (его производная на выходе дифференциатора .А2 меняет знак Таким образо.м, к мо.менту окончания сигнала на выходе компаратора А1 (фиг. 4г) в счетчике D3 оказывается подсчитанным числом , определяющее асимметрию сигнала основной приемной антенны. По окончании сигнала с компаратора А1 схема ИО2 закрывается, а поступление тактовых импульсов на счетчик прекращается. Число, накопленное в счетчике D3, через буферный регистр D4 поступает на вход микро-ЭВМ. При дальнейшем перемещении спортсмена, когда он проходит над проводами следующих дополнительной 2 и основной 1 приемной антенн, схема работает аналогично. По сигналу дополнительной антенны триггера D1 запрепдает счет в счетчик D3. По сигналу основной антенны запрет счета снимается и реверсивный счетчик подсчитывает характеристику асимметрии сигнала При этом к началу счета пороговый элемент 6 по результатам измерения амплитуды сигнала дополнительной приемной антенны вырабатывает пороговый уровень Un. Расчетные и экспериментальные данные, полученные при анализе предлагаемого устройства, показывают, что ощибка фиксации положения составляет величину порядка 3-5 см независимо от ориентации оси передающей антенны. В известном устройстве точность фиксации значительно ниже из-за наличия неконтролируемого смещения результата измерения при неизвестной ориентации оси передающей антенны. Как отмечалось, при незначительном отклонении оси передающей антенны от расчетного значения (2Г 10°) и при высоте подвеса передающей антенны м неконтролируемое с.мещение составит 0,14 м, что представляет собой значительную ошибку фиксации положения спортсмена.
и it)
Фиг. 2 Таким образом, предлагаемое устройство позволяет существенно повысить точность фиксации положения спортсмена.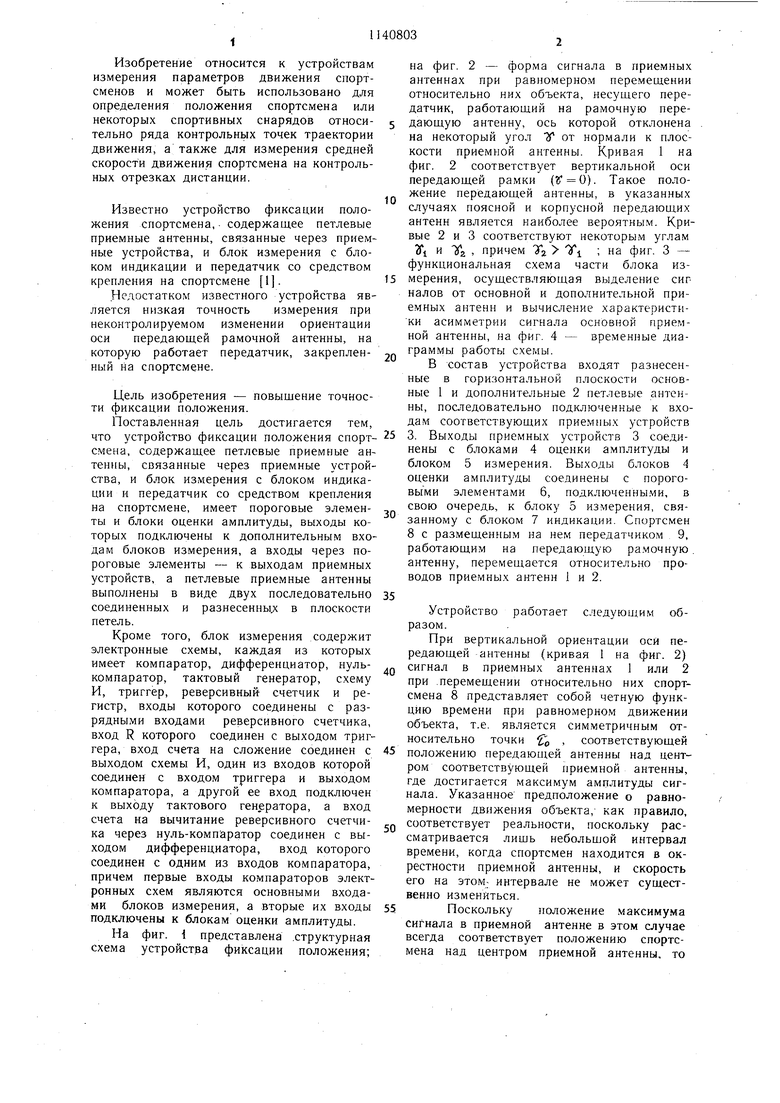
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации интервалов времени в спортивных состязаниях | 1990 |
|
SU1753481A1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| Устройство для определения моментов появления экстремумов | 1989 |
|
SU1661980A2 |
| Устройство фиксации положения спортсмена | 1981 |
|
SU995823A1 |
| Радиопеленгатор ближних гроз | 1984 |
|
SU1233064A1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1996 |
|
RU2106655C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ЗАТУХАНИЯ МЕЖДУ АНТЕННАМ | 1995 |
|
RU2127889C1 |
| Устройство для регистрации времени движения спортсмена | 1985 |
|
SU1432572A1 |
| Устройство для управления двухтактным преобразователем напряжения | 1987 |
|
SU1624635A1 |
1. УСТРОЙСТВО ФИКСАЦИИ ПОЛОЖЕНИЯ СПОРТСМЕНА, содержащее петлевые приемные антенны, связанные через приемные устройства, и блок измерения с блоком индикации и передатчик со средством крепления на спортсмене, отличающееся тем, что, с целью повышения точности фиксации, оно имеет пороговые элементы и блоки оценки амплитуды, выходы которых подключены к дополнительным входам блоков измерения, а входы через пороговые элементы - к выходам приемных устройств, а петлевые приемные антенны выполнены в виде двух последовательно соединенных и разнесенных в плоскости петель. 2. Устройство по п. 1, отличающееся тем, что блок измерения содержит электронные схемы, каждая из которых имеет компаратор, дифференциатор, нуль-компаратор, тактовый генератор, схему И. триггер, реверсивный счетчик и регистр, входы которого соединены с разрядными входами реверсивного счетчика, вход R которого соединен с выходом триггера, вход счета на сложение соединен с выходом схемы И, один из входов которой соединен с входом триггера и выходом компаратора, другой ее- вход подключен к i выходу тактового генератора, а вход счета на вычитание реверсивного счетчика че(Л рез нуль-компаратор соединен с выходом дифференциатора, вход которого соединен с одним из в.ходов компаратора, причем первые входы компараторов электронных схем являются основными входами блоков измерения, а вторые их входы подключены к блокам оценки амплитуды.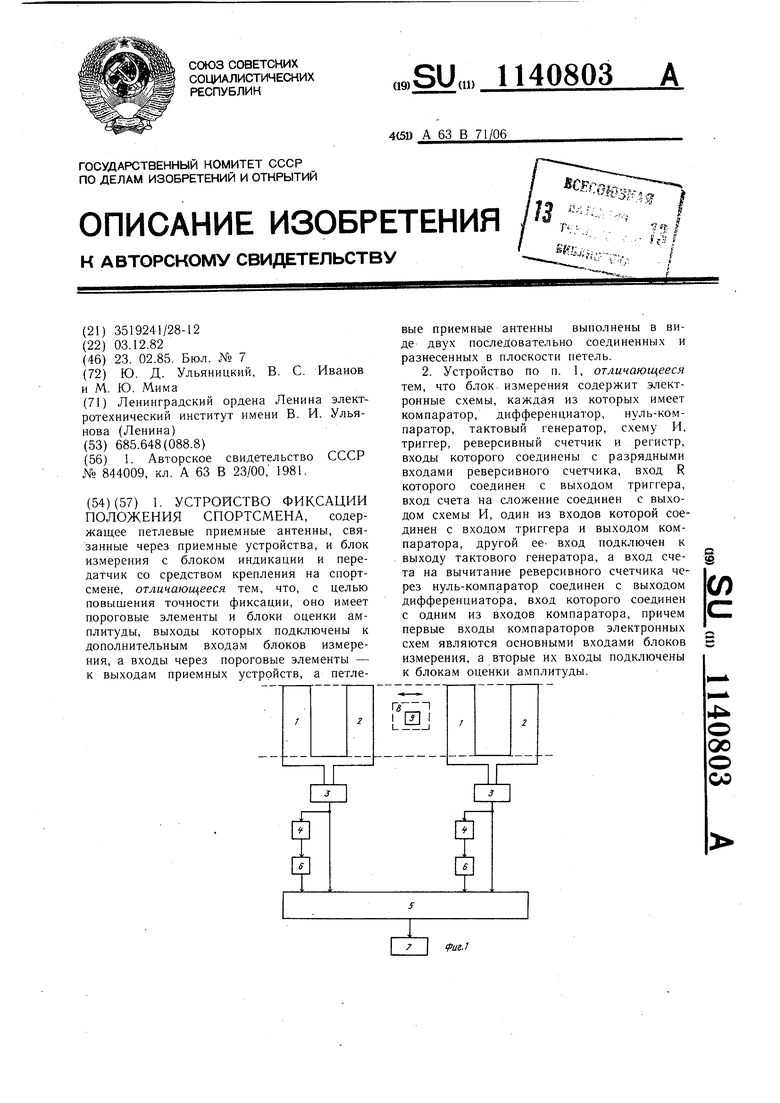
От BJJ.S
ti
u
Л
п
Уст,,, О
д
/
Фиг.з
я; :.n
)
Фиг.
| I | |||
| Устройство для фиксации положенияСпОРТиВНыХ Об'ЕКТОВ | 1979 |
|
SU844009A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
