Изо ©ретенне относится к электротехнике, а более конкретно к устройствам сигнализации положения, используемым в системах автоматики различного назначения. Качественно новый уровень внедряемой-, в, народное хозяйство дождевальной техники достигается в том числе самоходностью дождевальных машин по заданной траектории движения (курсу) определяемому рельефом местности, землеустройством, топографией оросительных каналов и т.п. Движение машин по заданному курсу обеспечивается автоматическими систе мами управления, источниками информа ции для которых об отклонении от кур са являются сигнализаторы положений подвижных органов дождевальных машин следящих за курсом. Коррекция курса дождевальных машин должна обеспечиваться при различных уровнях откло нений последних от заданной траектории движения. Это определяет необходимость выдачи электрических сигналов сигнализатором в различных (требуемых ) положениях элемента ввода движения в сигнализатор, на который воздействует подвижный орган, а также сохранение состояния электри ческого сигнала при любой величине перемещения элемента ввода движения за каждую .точку выдачи сигнала. Известно коммутационное устройство, содержащее шток, толкатель, кинематически связанный со штоком, и микропереключатель С1 1. Указанное коммутационное устройст во может быть использовано как сигна лизатор положения при механическом воздействии(нажатии ) на его шток. Пр перемещении штока на определенную ве личину толкатель, кинематически -связанный со штоком, воздействует на кнопку микропереключателя - контакты последнего переключаются (на выходе сигнализатора появляется электрический сигнал). Однако этот сигнал может быть получен только в одном наперед заданном положении штока, а продвижение штока за точку выдачи сигнала строго ог раничено конструкцией нажимателя. Таким образом, указанное коммутационное, устройство в принципе не может выполнять функции сигнализатора различных требуемых положений воз действующего на его элемент ввода движения подвижного органа (в любых требуемых положениях элемента ввода движения ), при неограниченной величине пережима, т.е. дополнительного перемещения за каждую точку выдачи сигнала. Наиболее близким к изобретению является сигнализатор положений, содержащий корпус, ось, кулачок в виде диска с двумя лысками на его цилиндрической поверхности, расположенными одна напротив другой под углом одна к другой, толкатель в виде пластины, закрепленной на корпусе с возможностью поворота, промежуточный элемент с цилиндрической боковой поверхностью, закрепленный на толкателе также с возможностью поворота, возвратную пружину и микропереключатель, при этом кулачок связан с промежуточным элементом толкателя С2 J. Однако известное устройство не обеспечивает выдачу сигналов в любых требуемых положениях оси, а также не обеспечивает неограниченную величину пережима за каждую точку выдачи сигнала, что ограничивает область его применения. Цель изобретения - расширение области применения. Поставленная цель достигается тем, что сигнализатор положений, содержащий корпус, ось, кулачок в виде диска с двумя лысками на его . цилиндрической поверхности, расположенными одна напротив другой и под углом одна к другой, толкатель в виде пластины, закрепленной на корпусе с возможностью поворота, промежуточный элемент с цилиндрической боковой поверхностью, закрепленный на толкателе также с возможностью поворота, возвратную пружину и-микропереключатель, при этом кулачок связан с промежуточным элементом толкател я, снабжен цилиндрической пружиной сжатия, упорами, упорными шайбами, опорной шайбой, стопорной шайбой и цилиндрической втулкой с кольцевым пояском, цилиндрическая втулка и стопорная шайба жестко закреплены на оси, а кулачок и упорные шайбы установлены.на цилиндрической втулке с возможностью свободного поворота, причем боковая поверхность кулачка и боковая поверхность кольцевого пояска цилиндрической втулки, обращенные одна к другой, выполнены
шлифованными, упорные шайбы размещены между кольцевым пояском цилиндрической втулки и кулачком, опорная шайба установлена на указанной оси с возможностью поворота и упирает- ся в стопорную шайбу,, а цилиндрическая пружина сжатия установлена на оси между опорной шайбой и кулачком, при этом кулачок и упорные шайбы поджаты указанной пружиной к кольце- вому пояску цилиндрической втулки, а кулачок установлен так, что поверхность одной из лысок кулачка имеет возможность попеременного взаимодействия с упорами, закрепленными на корпусе, а возвратная пружина размещена между микропереключателем и толкателем так, что толкатель с промежуточным элементом поджат указанной возвратной пружиной к поверхност другой лыски кулачка.
Промежуточный элемент выполнен в виде шарикоподшипника.
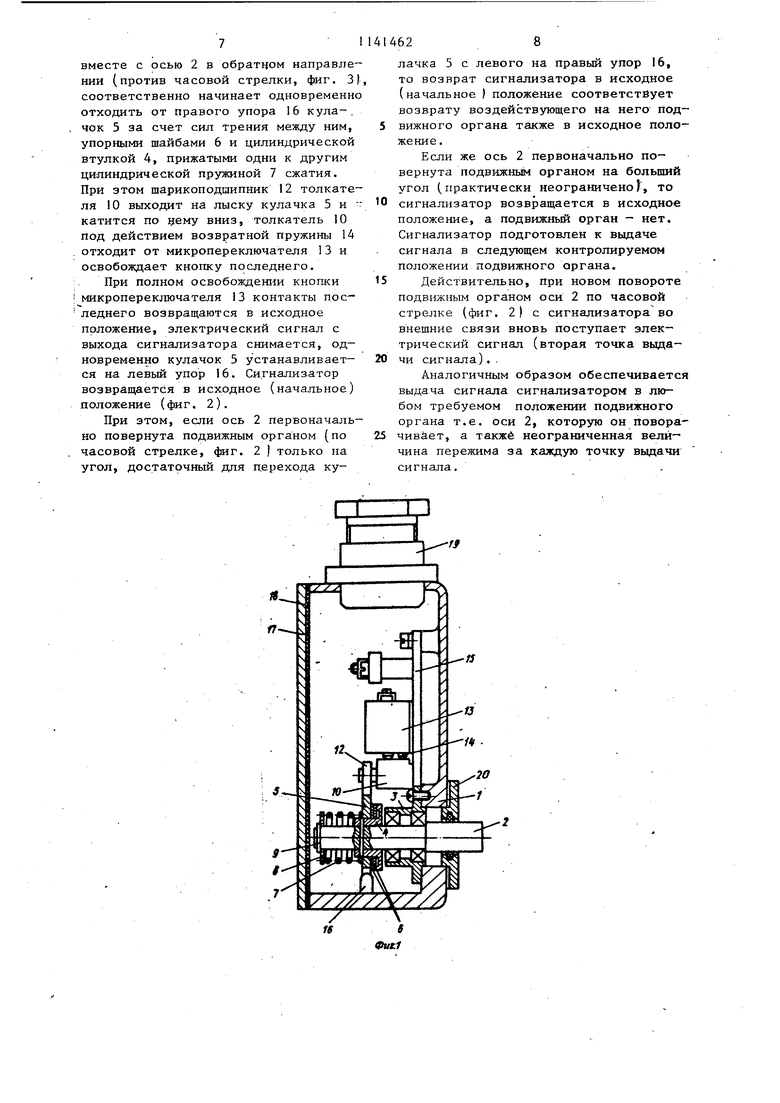
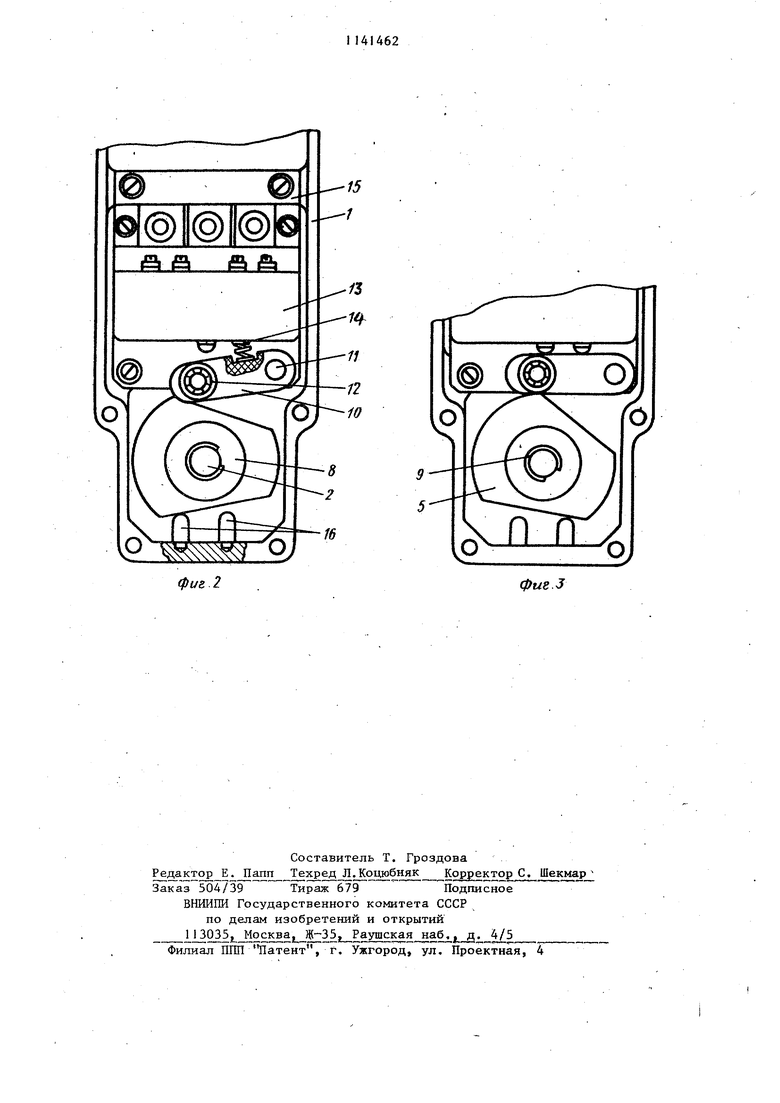
На фиг. 1 показан сигнализатор положений, общий вид; на фиг. 2 то же, вид сбоку без крьш1ки в исходном положении; на фиг. 3 - то же, в положении срабатывания.
Сигнализатор положений содержит корпус 1, ось 2, выполненную в форме ступенчатого цилиндра, причем ступень меньшего диаметра размещена внутри корпуса 1 и выполнена с коль- цевой канавкой на свободном конце. На ступени большего диаметра, высту- пающей из корпусд 1, при необходимости крепится любым известным способом элемент связи (например, рычаг, зубчатое колесо и т.п.)сигнализатора с органом, положения которого конт- ролируются. Подшипниковый узел 3 с двумя соосными шарикоподшипниками закреплен с помощью фланца внутри корпуса 1. Во внутренних обоймах шарикоподшипников узла ось 2 уста- новлена так, что ее ступень большего диаметра упирается во внутреннюю обому одного из шарикоподшипников. Ус- тановкой оси 2 в двух шарикоподшипниках обеспечивается стабильность её положения в процессе эксплуатации сигнализатора. Цилиндрическую втулку 4, жестко, например, с помощью штифта, закрепляют на оси 2. Цилиндрическая втулка 4 выполнена с выступающим пояском, имеющим шлифованную поверхность. Кулачок 5 выполнен в фоме диска с центральным осевым отверс
тием и двумя лысками на его цилиндрической поверхности, расположенными одна напротив другой и под углом одна к другой, и размещен на цилиндрической втулке 4 так, что имеет возможность свободно проворачиваться относительно последней ( это реализуется, например установкой кулачка 5 на цилиндрической втулке 4. по скользящей посадке I. Кулачок 5 и цилиндрическая втулка 4 выполнены из одинакового металла, например стали, при этом боковая поверхность кулачка 5, обращенная к шлифованной поверхности выступающего пояска цилиндрической втулки 4. выполнена также шлифован- ной.
Две шорные шайбы 6 выполнены из материала с низким коэффициентом трения, например капролона. Упорные шайбы 6 размещены на цилиндрической втулке 4 между кольцевым пояском последней и кулачком 5, при этом диаметр центрального отверстия у каждой упорной шайбы равен диаметру центрального осевого отверстия кулачка. Сигнализатор содержит также цилиндрическую пружину 7 сжатия, размещенную на оси 2, опорную щай- :бу 8, также размещенную на оси 2 так, что опорная шайба имеет возможность свободно проворачиваться на указанной оси, стопорную шайбу 9, зафиксированную в кольцевой канавке оси 2.
Опорная шайба 8 прижата к стопорной шайбе 9 цилиндрической пружиной 7 сжатия, размещенной между кулачком 5 и опорной шайбой 8. Толкатель 10 выполнен в форме пластины и установлен на своей оси 1Г одним концом так что имеет возможность свободно качат ся в плоскости,параллельной плоскости кулачка 5. Шарикоподшипник 12 закреплен на толкателе 10. Толкатель с Шарикоподшипником 12 поджат к лыске кулачка. Вместо шарикоподшипника при реализации конструкции сигнализатора может быть использоваи ролик или т.п. Сигнализатор, содевжит также микропере11лючатель 13, тип которого приреализации сигнализатора может быть выбран любым - в зависимости от схемных решений и требув мых уровней коммутадии. Возвратная пружина 14 расположена MeacAy;TjOJikaтелем 10 (в пазу последнего) и микропереключателем 13.
S11
Возвратная пружина 14 обеспечивает постоянный механический контакт шарикоподшипника 12 с кулачком 5, а также отжимает толкатель 10 от кнопки микропереключателя 13. Плата 15 установлена на корпусе 1. На плате закфеплены ось 11 качания толкателя 10 и микропереключатель 13, а также- установлены элементы для электрического подсоединения микропереключателя 13 к внешним связям сигнализатора положений.
Настройка сигнализатора положения при его изготовлении может быть осуществлена, при необходимости, перемещением плату 15с установленными на ней элементами относительно оси 2 (соответственно - кулачка 5) за счет зазоров в деталях крепления платы 15 к корпусу 1,
Два упора 16, жестко закрепленны на корпусе 1 в плоскости кулачка 5 со стороны, противоположной толкателю, размещены ближе к краям лыски кулачка.- Крышка 17, прокладка 18, узел 19 ввода кабеля и сальниковый фпанец 20 являются элементам конструкции сигнализатора, обеспечивающими защиту внутренней полости его корпуса 1 от воздействия внешней среды.
Сигнализатор положений работает следующим образом.
В исходном (начальном) положении сигнализатора (фиг. 1 и 2) кулачок 5 своей лыской поджат к одному из упоров 16 (левому упору на фиг. и З); шарикоподшипник 12 толкателя 10 находится на другой лыске кулачка 5, а кнопка микропереключателя 13 освобождена от воздействия толкател 10 (контакты микропереключателя 13 -находятся в исходном состоянии).
Такое взаимное расположение толкателя, 10, кнопки микропереключател 13, кулачка 5 и упоров 16 обеспечивается возвратной пружиной 14.
При повороте оси 2 подвижным органом, положения которого контролируются сигналтизатором, от исходного (начального) положения в направлени почасовой стрелке (фиг, 2) вместе с осью 2 поворачиваются жестко закрепленные на ней цилиндрическая втулка 4 и удерживаемые одни относительно других силами трения упорные шайбы 6, кулачок 5, цилиндрическая пружина 7 сжатия, опорная шайба 8 и стопорная шайба 9,
626
При этом кулачок 5 отходит от ле вого упора 16, шарикоподшипник 12 катится по прямолинейному участку кулачка 5 вверх, а толкатель 10 на-
5 чинает воздействовать на кнопку микропереключателя 13,
При достижении осью 2 положения, соответствующего контролируемому положению подвижного органа (фиг, 31,
0 .шарикоподшипник 12 выходит на окружность образующей поверхности кулачка 5, толкатель 10 утапливает кнопку микропереключателя 13 на величину, обеспечивающую переключение контактов
5 последнего, а кулачок 5 устанавливается на правый упор 16.
Переключение контактов микропереключателя 13 соответствует первой точке выдачи сигнала сигнализатором. С
0 сигнализатора поступает требуемый электрический сигнал.
При .дальнейшем повороте подвижным органом оси 2 в том.же направлении цилиндрическая втулка 4, упорные 5 шайбы 6 и стопорная шайба 9 продолжают поворачиваться вместе с осью 2, а кулачок 5 сохраняет свое положение на правом упоре, 16, так как упорные шайбы 6 с цилиндрической втулкой 4
Q проскальзывают относительно него и силами трения продолжают поджимать кулачок к правому (фиг. З) упору 16. Вместе с кулачком 5 сохраняют свое положение цилиндрическая пружина 7 сжатия и опорная шайба 8, проскальзывающая относительно стопорной шайбы 9, а также толкатель 10, шарикоподшипник 12 которого остается на окружности кулачка 5. Соответственjj но йохраняется состояние контактов микропереключателя 13 и электрического сигнала на выходе сигнализатора положения.
Подвижный орган, положения которого контролируются сигнализатором, может продолжать проворачивать ось неограниченно, при этом кулачок 5 остается на правом упоре 16, состояние контактов микропереключателя 13 сохраняется, состояние электрического сигнала на выходе сигнализатора не изменяется. Таким образом, сигнализатор обеспечивает неограниченную величину пережима за точку выдачи сигнала.
Как только подвижный орган изменяет направление поворота оси 2, цилиндрическая втулка 4, шайбы 6 и стопорная шайба 9 начинают поворачиваться вместе с осью 2 в обратном направле нии (против часовой стрелки, фиг. 3 соответственно начинает одновременн отходить от правого упора 16 кула-. чок 5 за счет сил трения между ним, упорными шайбами 6 и цилиндрической втулкой 4, прижатыми одни к другим цилиндрической пружиной 7 сжатия. При этом шарикоподшипник 12 толкате ля 10 выходит на лыску кулачка 5 и катится по цену вниз, толкатель 10 под действием возвратной пружины 14 отходит от микропереключателя 13 и освобождает кнопку последнего. При полном освобождении кнопки микропереключателя 13 контакты последнего возвращаются в исходное положение, электрический сигнал с выхода сигнализатора снимается, одновременно кулачок 5 устанавливается на левый упор 16. Сигнализатор возвращается в исходное (начальное) положение (фиг, 2). При этом, если ось 2 первоначаль но повернута подвижным органом (по часовой стрелке, фиг. 2 ) только на угол, достаточный для перехода ку628лачка 5 с левого на правый упор 16, то возврат сигнализатора в исходное (начальное ) положение соответствует возврату воздействующего на него подвижного органа также в исходное положение. Если же ось 2 первоначально повернута подвижньм органом на больший угол (практически неограничено), то сигнализатор возвращается в исходное положение, а подвижный орган - нет, Сигнализатор подготовлен к выдаче сигнала в следующем контролируемом положении подвижного Органа. Действительно, при новом повороте подвижным органом оси 2 по часовой стрелке (фиг. 2) с сигнализатора во внешние связи вновь поступает электрический сигнал (вторая точка вида- чи сигнала). . Аналогичным образом обеспечивается выдача сигнала сигнализатором в любом требуемом положении подвижного органа т.е. оси 2, которую он позорачивйет, а также неограниченная величина пережима за каждую точку выдачи сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор положений | 1985 |
|
SU1348922A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Контактный сигнализатор положений | 1984 |
|
SU1211819A1 |
| Коммутационное устройство | 1982 |
|
SU1032489A1 |
| Биметаллический термометр с регулирующим механизмом | 1980 |
|
SU928176A2 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2013 |
|
RU2545163C1 |
| АНТИРЕВЕРСИВНЫЙ МЕХАНИЗМ КАТУШКИ ДЛЯ ЛЕСЫ | 1989 |
|
RU2067390C1 |
| Устройство для подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1782692A1 |
| ФРИКЦИОННАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА КАТУШКИ ДЛЯ ЛЕСЫ | 1989 |
|
RU2067392C1 |
. СИГНАЛИЗАТОР ПОЛОЖЕНИЙ, содержащий корпус, ось, кулачок в виде диска с двумя лысками на его цилиндрической поверхности, расположенными одна напротив другой и под углом одна к другой, толкатель в виде пластины, закрепленной на корпусе с возможностью поворота, промежуточный элемент с цилиндрической боковой поверхностью, закрепленный на толкателе также с возможностью поворота, возвратную пружину и микропереключатель, при этом кулачок связан с промежуточным элементом толкателя, отличающи и с я тем, что, с целью расширения области применения, он снабжен цилиндрической пружиной сжатия, упорами, упорными шайбами, опорной шайбой , стопорной шайбой и цилиндрической втул- кой с кольцевым пояском, цилиндрическая втулка и стопорная шайба жестко закреплены на оси, а кулачок и упорные шайбы установлены на цилиндрической втулке с возможностью свободного поворота, причем боковая поверхность кулачка и боковая поверхность кольцевого пояска цилиндрической втулки, обраш;енные одна к другой, выполнены шлифованными, упорные шайбы размещены между кольцевым пояском цилиндрической втулки и кулачком, опорная шайба установлена на указанной оси с возможностью поворота и упирается в стопорную ш&йбу, а цилиндрическая пружина сжатия установлена на оси между опорной шайбой и кулачком, при этом кулачок и упорные шайбы поджаты указанной пружиной к кольцевому пояску цилиндричессл кой втулки, а кулачок установлен так, что поверхность одной из лысок кулачка имеет возможность попеременного взаимодействия с упорами, закрепленными на корпусе,, а возвратная пружина размещена между микропереключателем и толкателем так, что толкатель с промежуточным элементом поджат указанной возвратной пружиной к поверхности другой лыски фь кулачка. Од ьо 2, Сигнализатор по п. 1, о т Иичающийся тем, что промежуточный элемент выполнен в виде шарикоподшипника.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коммутационное устройство | 1979 |
|
SU864365A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ВЫВОДА СКВАЖИНЫ, ОБОРУДОВАННОЙ УСТАНОВКОЙ ЭЛЕКТРОЦЕНТРОБЕЖНОГО НАСОСА С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ, НА СТАЦИОНАРНЫЙ РЕЖИМ РАБОТЫ | 2000 |
|
RU2181829C2 |
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
