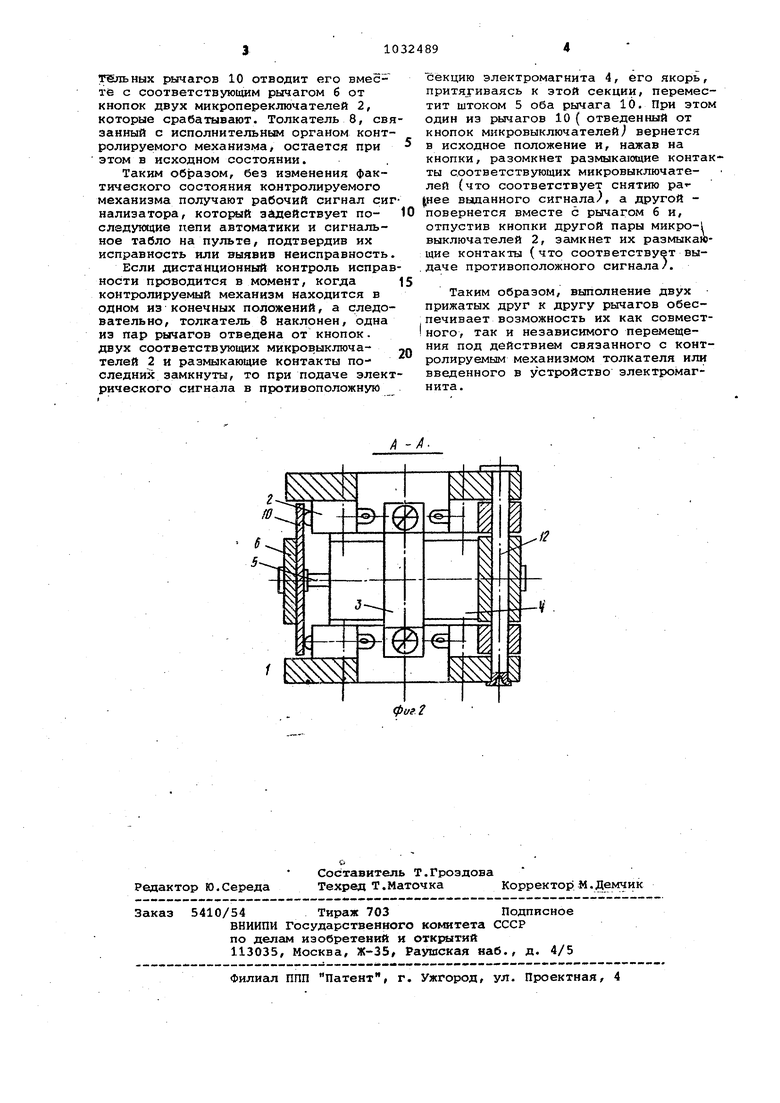
; Изобретение относится к электроте нике, в частности к когумутационным устройствам сигнализаторов конечного положения исполнительных органов раз личных автоматизируемьйх механизмов. Известно коммутационное, устройство, содержащее смонтированные на основании микропереключатели и элементы управления ими, пЪдпружиненный толкатель и замыкатель в виде пласти ныГ1.. Недостатком устройства является TJD, что оно не обеспечивает возможности дистанционного коргсроля исправ нЬсти, в то время как в случае испол вования коммутационных устройств В составе, например, сигнализаторов конечного положения исполнительных о ганов механизмов, управляемых с по. мощью систем автоматики, часто возни кает необходимость в периодическом проведении дистанционного контроля исправности как самих сигнализаторов, так и последующих за ним кабель ных линий, логических цепей автоматики и пультовых сигнальных устpoifcTB. Известно также коммутационное уст ррйство, содержащее корпус, закрепленные в корпусе контактные элементы, электромагнит с якорем, рычаги и толкатель, установленный с возможностью взаимодействия с рычагами, закрепленными на осях и связанных ме цу собой рабочей пру хинойи23. Данное устройство обеспечивает возможность дистанционного контроля, однако онЬ сложно по конструкции. Цель изобретения - упрощение конструкции. Указанная цель достигается тем, что коммутационное устройство, содер . жащее корпус, закрепленные в корпусе контактные элементы, электромаг нит с якорем, рычаги, и толкатель, установленный с возможностью взаимодействия с рычагами, закрепленными на осях и связанными между собой рабочей пружиной, снабжено дополнитель ными рычагами и дополнительными npi жинами; дополнительные рычаги шарнирно связаны с якорем электромагнита с возможностью попеременного взаимодейс ВИЯ -с контактными элементами, при этом каждый дополнительный рычаг закреплен на оси одного из ука занвых рычагов, соединенных с рабочей пружиной, и образует с ним кинематическую пару, поджатую дополнител;ьной пружиной. На фиг.1 зображен разрёэ по вертикальной оси симметрии устройства,, на фиг.2 - сечение А-А на фиг.1, Устройство состоит из корпуса 1, в котором закреплены четыре контактных элемента (микропереключателя ), 2, а также при помощи скобы 3 двухсекци онный электромагнит 4 со штоком 5, связанным с расположенным внутри электромагнита подвижным якорем. Рычаги б прижаты пружиной 7 к толкателю 8 Т-образной формы, установленному в корпусе на оси 9уи связанному с исполнительным органом контролируемого механизма. Оба конца штока 5, шарнирно соединены с дополнительными рычагами 10, наружные поверхности которых прижаты с помощью пружин 11 к рычагам 6. Рычаги б и 10 попарно насажены на общие оси 12 закрепленные на корпусе 1. Каждый рычаг б воздействует снаружи на дополнительный рычаг 10 и, сжимая менее жесткую пружину 11 f по сравнению с рабочей пружиной)обеспечивает нажатие рычага 10 ни обращенные к ней кнопки двух микропереключателей 2. Кнопки всех микропереключателей в исходном состоянии оказываются нажаты, а их размыкакддие контакты разомкнуты. В этом положении рычаги 10 с помощью регулируемых упоров 13 опираются на корпус 1, Устройство работает следующим образом. При использовании по прямому назначению исполнительный орган контролируемого .механизма, совершая перемещение в том или другом направлении по стрелке Б( фиг.1), воздействует на толкатель 8, который поворачиваясь вбкруг оси 9, нажимает на один из 15ычагов 6 и поворачивает его относительно оси 12, сжимая пружину 7. Под действиемусилия пружины 11, дополнительный рычаг 10 движется вслед за рычагом б, поворачиваясь вокруг той же оси 12. При этом кнопки двух микропереключателей освобождаются и происходит их срабатывание ( замыкание размыкающих контактов). Шток 5 вместе с якорем электромагнита 4 перемещается за дополнительным рычагом 10 до упора якоря в торец одной из секций электромагнита 4 (внутри последнего ). Дальнейшее перемещение толкателя 8 ( пережим сигнализатора ) не передается дополнительному рычагу рычаг б может продолжать по- ворот относительно оси 12. Состояние рычагов б и 10 и двух микропереключателей, расположенных на противоположной стороне устройства, остается при этом неизменным, так как толкатель 8 не воздействует на них, а сжимаемая пружина 7 еще сильнее прижи мает оба рычага упором 13 к корпусу 1 . В режиме дистанционного контроля исправности контроль проводится в исходком показанном на фйг.1 j состоянии устройства, то при подаче электрического сигнала в ту или другую секцию электромагнита 4 якорь последнего притягивается к этой секции, а шток 5, нажимая на один из дополнительных рычагов 10 отводит его вмес- те с соответствующим рычагом б от кнопок двух микропереключателей 2, которые срабатывают. Толкатель 8, связанный с исполнительным органом контролируемого механизма, остается при этом в исходном состоянии.
Таким образом, без изменения фактического состояния контролируемого механизма получают рабочий сигнал сигнализатора, котоЕялй зйдействует по- 10 следующие пепи автоматики и сигнальное табло на пульте, подтвердив их исправность или выявив неисправность.
Если дистанционный контроль исправности проводится в момент, когла 15 контролируемый механизм находится в одном из конечных положений, а следовательно, толкатель 8 наклонен, одна из пар рычагов отведена от кнопок. двух соответствующих микровыключа- -„ телей 2 и размыкающие контакты последних замкнуты, то при подаче электрического сигнала в противоположную
секцию электромагнита 4, его якорь, притягиваясь к этой секции, переместит штоком 5 оба рычага 10. При этом один из рычагов 10 ( отведенный от кнопок микровыключателей вернется в исходное положение и, нажав на кнопки, разомкнет размыкающие контакты соответствующих микровыключателей (что соответствует снятию ра нее выданного сигнала-, а другой повернется вместе с рычагом б и, отпустив кнопки другой пары микро-1 выключателей 2, замкнет их размыкающие контакты (что соответствует выдаче противоположного сигнала/.
Таким образом, выполнение двух прижатых друг к другу рычагов обеспечивает возможность их как совместного, так и независимого перемещения под действием связанного с контролируемым механизмом толкателя или введенного в устройство электромагнита.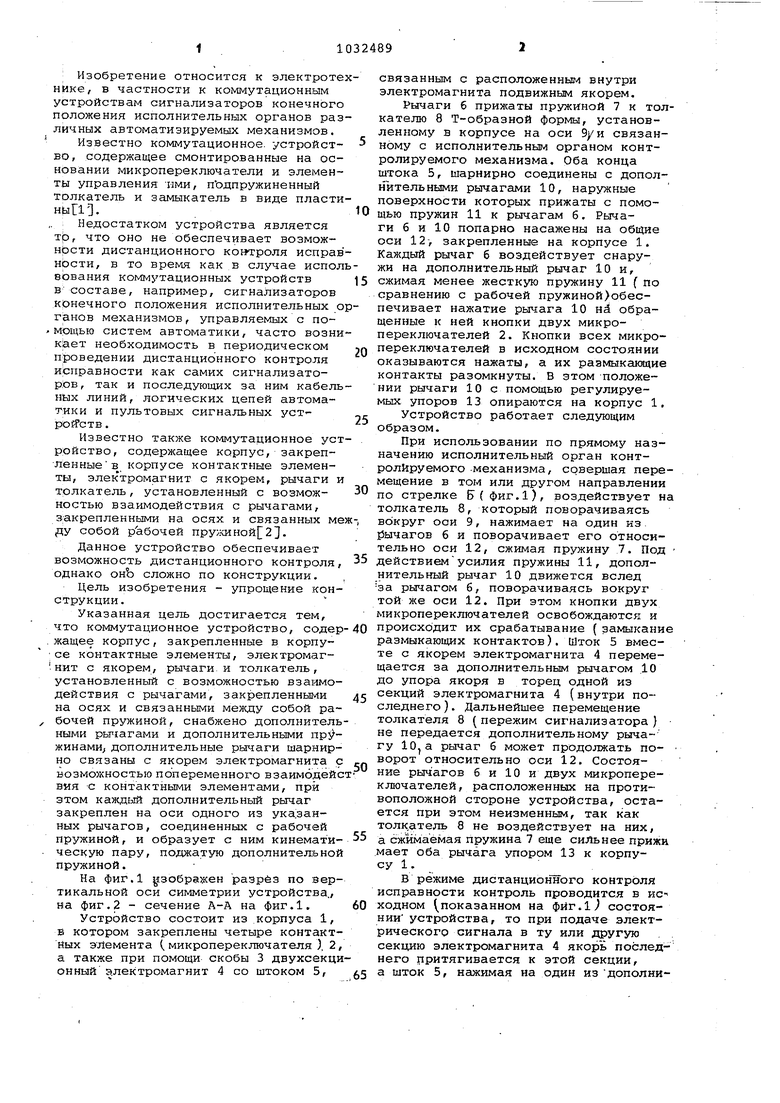
| название | год | авторы | номер документа |
|---|---|---|---|
| Сигнализатор положений | 1983 |
|
SU1141462A1 |
| Устройство для коммутации силовых электрических цепей | 1979 |
|
SU1003188A1 |
| Устройство для коммутации силовых электрических цепей | 1984 |
|
SU1229847A2 |
| Трехпозиционный переключатель | 1981 |
|
SU1032490A1 |
| Пускатель-автомат | 1982 |
|
SU1105956A1 |
| Торговый автомат | 1957 |
|
SU115788A1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
| Устройство для коммутации силовых электрических цепей | 1980 |
|
SU1003189A1 |
| Электроконтактный сигнализатор | 1983 |
|
SU1145367A1 |
| Автомат для печатания на бумажной ленте и выдачи чеков различных видов и стоимости | 1973 |
|
SU485480A1 |
КОММУТАЦИОЫНО Ё УСТРОЙСТВО, содержащее корпус, закрегцтенные в корпусе контактные элементы, электромагнит с якорем, рычаги и толкатель, установленный с возможностью взаимодействия с рьгчапами, закрепленными на осях и связанными между собой рабочей пружиной, отличаю щеес я тем, что, с целью упрощений конструкции, оно снабжено дополнительными -рычагами и дополнительными пружинами, дополнительные рычаги щарнирно связаны с якорем электромагнита с возможностью попеременного взаимодействия с контактными элемейтами, при этом каждый дополнительный рычаг закреплен на оси одного из указанных рычагов,соединеHffiix с рабочей пружиной и образует с ним кинематическую пару, поджатую дополнительной пружиной. СО 00 СО
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коммутационное устройство | 1979 |
|
SU864365A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УДАРОВИБРОСТОЙКИЙ | 0 |
|
SU395914A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
