Описываемый горизонтальный бесшаботный молот предназначается для горячей штамповки изделий ударом двух бойков, движущихся навстречу один другому с одинаковыми скоростями и одинаковой энергией удара.
С этой целью в молоте применены электромагнитные устройства, выполненные с плоскими якорями, катушки которых соединены между собой последовательно и обтекаются одним и тем же током игнитронного трехфазного выпрямителя.
Для выравнивания скорости движения бойков и полной синхронизации работы правой и левой частей молота у катушек одного из бойков применены дополнительные компенсационные обмотки с отводами, подключаемыми или отключаемыми при помощи коммутатора, работающего от датчика длины пути перебега или недобега бойка.
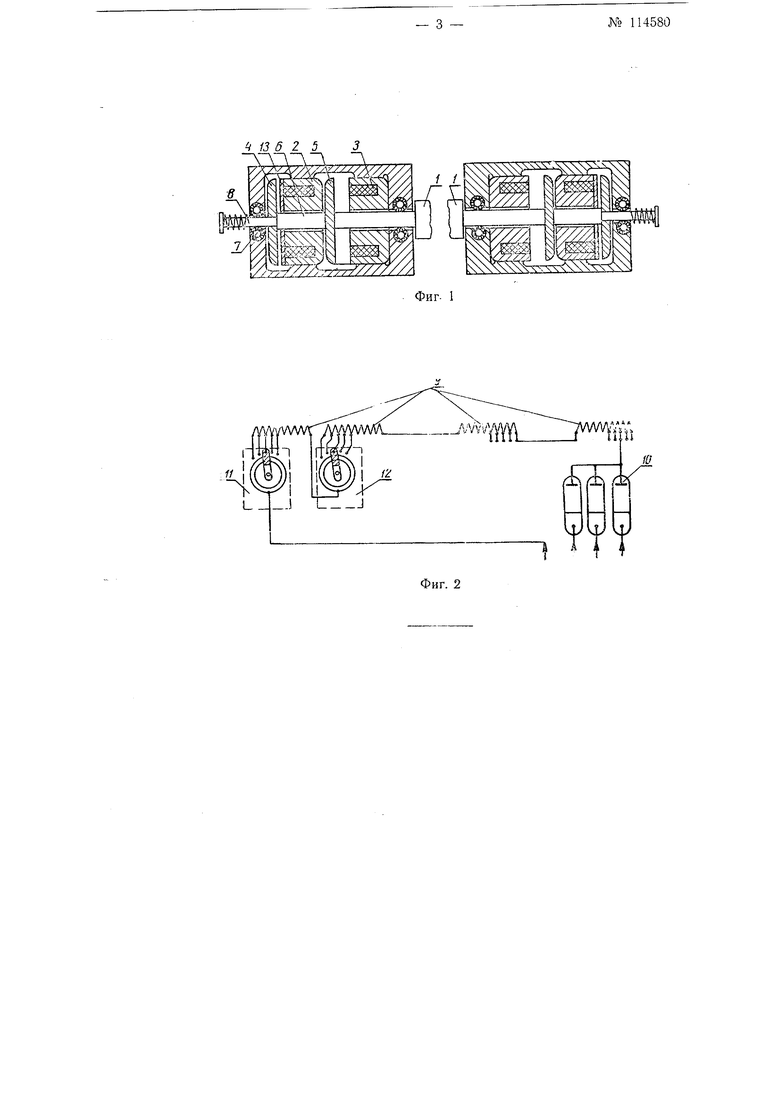
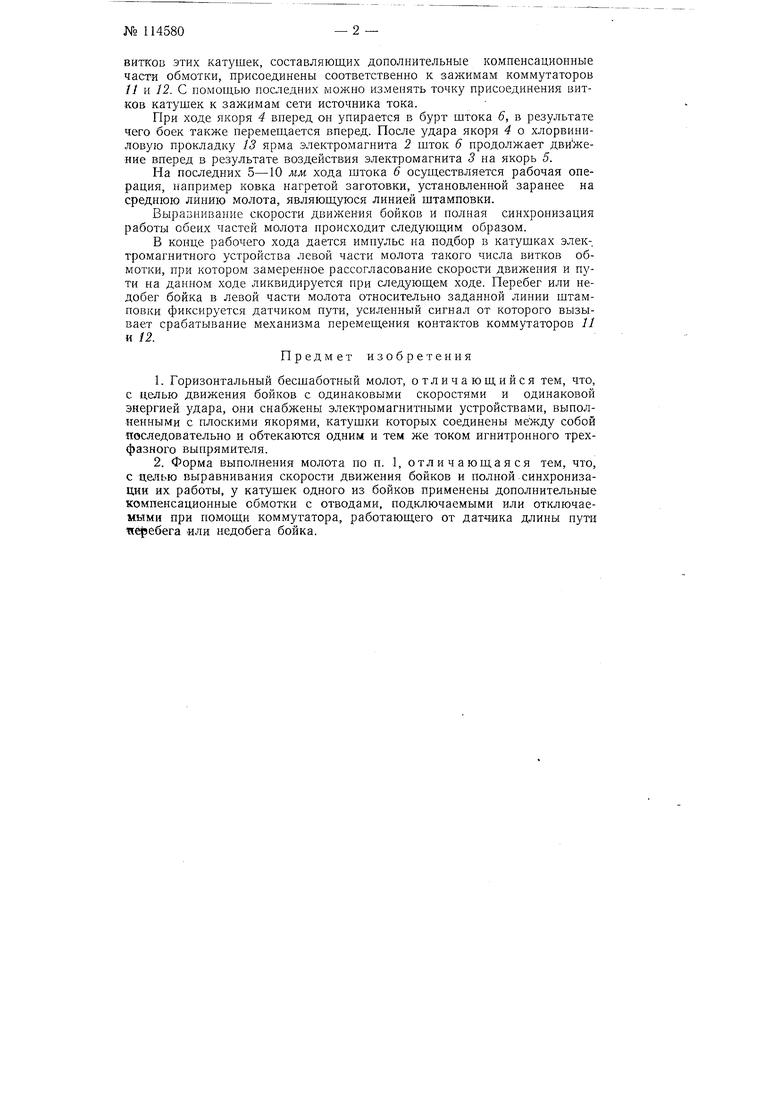
На фиг. 1 изображена схема горизонтального бесшаботного молота; на фиг. 2 - схема соединения катушек электромагнитных устройств молота.
Горизонтальный бесщаботный молот состоит из двух одинаковых по конструкции частей, монтированных на общей станине и имеющих движущиеся навстречу один другому бойки /.
Движением каждого бойка управляет электромагнитное устройство, включающее в себя электромагниты 2 и 3 с плоскими якорями 4 и 5.
Якори 4 и 5 установлены на несущем боек штоке 6, п 1ичем якорь 4 закреплен на подвижной посадке. Шток 6 перемещается в роликоподшипниковых опорах 7 и имеет пружину 8, устанавливающую его вместе с бойком в исходное положение.
Катушки 9 электромагнитов обеих частей молота имеют одинаковое число витков, одинаково намотаны, соединены между собой последовательно и питаются от одного источника тока через игнитронный трехфазный выпрямитель 10.
У катушек 9 одного из электромагнитных устройств молота, например в левой (по чертежу) его части, несколько одинаковых по числу
№ 114580- 2 -
витков этих катушек, составляющих дополнительные компенсационные части обмотки, присоединены соответственно к зажимам коммутаторов // и 12. С помощью последних можно изменять точку присоединения витков катушек к зажимам сети источника тока.
При ходе якоря 4 вперед он упирается в бурт штока 6, в результате чего боек также перемещается вперед. После удара якоря 4 о хлорвиниловую прокладку 13 ярма электромагнита 2 шток 6 продолжает движение вперед в результате воздействия электромагнита 3 на якорь 5.
На последних 5-10 мм хода штока 6 осуществляется рабочая операция, например ковка нагретой заготовки, установленной заранее на среднюю линию молота, являющуюся линией штамповки.
Выравнивание скорости движения бойков и полная синхронизация работы обеих частей молота нроисходит следующим образом.
В конце рабочего хода дается импульс на подбор в катушках элек-. тромагнитного устройства левой части молота такого числа витков обмотки, при котором замеренное рассогласование скорости движения и п}.тн на данном ходе ликвидируется при следующем ходе. Перебег или недобег бойка в левой части молота относительно заданной линии штамповки фиксируется датчиком пути, усиленный сигнал от которого вызывает срабатывание механизма перемещения контактов коммутаторов 11 и 12.
Предмет изобретения
1.Горизонтальный бесшаботный молот, отличающийся тем, что, с целью движения бойков с одинаковыми скоростями и одинаковой энергией удара, они снабжены электромагнитными устройствами, выполненными с плоскими якорями, катушки которых соединены между собой последовательно и обтекаются одним и тем же током игнитронного трехфазного выпрямителя.
2.Форма выполнения молота по п. 1, отличающаяся тем, что, с целью выравнивания скорости движения бойков и полной синхронизации их работы, у катушек одного из бойков применены дополнительные компенсационные обмотки с отводами, подключаемыми или отключаемыми при помощи коммутатора., работающего от датчика длины пути яфебега или недобега бойка.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМОЛОТ | 2008 |
|
RU2383684C1 |
| Способ управления многобойковым электромагнитным молотом и устройство для его осуществления | 1984 |
|
SU1247476A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| СКВАЖИННЫЙ СЕЙСМОИСТОЧНИК | 2017 |
|
RU2642199C1 |
| Вибромашина | 1991 |
|
SU1791041A1 |
| Скважинный сейсмоисточник | 2020 |
|
RU2753805C1 |
| СИСТЕМА ПИТАНИЯ И УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОЛОТОМ ДВОЙНОГО ДЕЙСТВИЯ, ВХОДЯЩИМ В СОСТАВ ВИБРОИСТОЧНИКА | 2023 |
|
RU2823122C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАШИН УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2454777C1 |
| Электромагнитный перфоратор | 1986 |
|
SU1373805A1 |
| Электродвигатель возвратно-поступательного движения | 1989 |
|
SU1721740A1 |