5.Способ по пп., отличающийся тем, что отклонения положения световой точки от контрольных точек в направлении сканирования определяют путем измерения времени движения световЬй точки между контрольными точками, затем формируют сигнгш разности времен движения как значение координаты X . 6.Способ ПОП.1, отличающий с я тем, что, с целью использования светового луча, модулированного видеосигналом, коррекцию положения информации изображения производят путем изменения временной последовательности значений видеосигнала на соответствующие величины коррекции. 7.Способ по п.6, отличающийся тем, что временную после119 довательность величин видеосигнала изменяют с помощью управляемого величинами коррекции изменения задержки времени, 8.Способ по П.6, отличающийся тем, что величины видеосигнала запоминают и посредством такта сигнала считывают, причем временную последовательность величин видеосигнала изменяйт посредством управляемого величинами коррекции изменения частоты такта считывания. 9.Способ по пп.6-8, отличающийся тем, что считывание величин видеосигнала осуществляют в начале строки посредством синхронизирующего стартового импульса.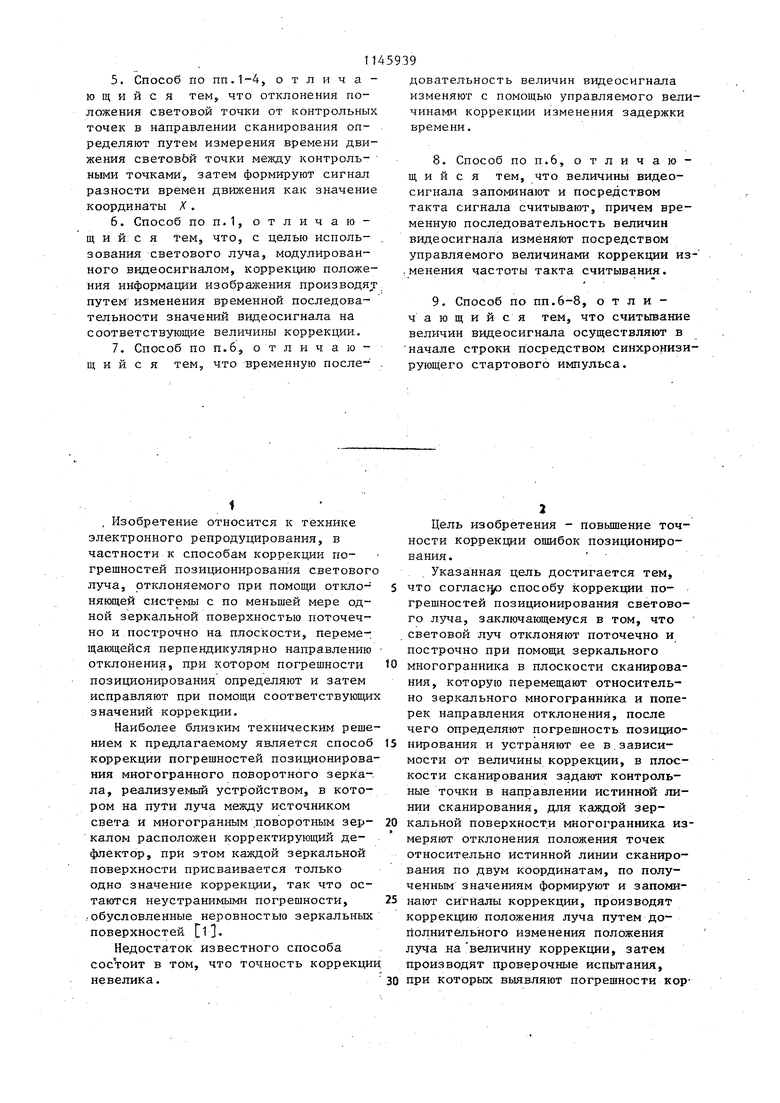
1. СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ПОЗИЦИОНИРОВАНИЯ СВЕТОВОГО ЛУЧА, заключающийся в том, что световой луч отклоняют поточечно и построчно при помощи зеркального многогранника в плоскостисканирования, которую перемещают относительно зеркального многогранника и поперек направления отклонения, после чего определяют погрешность позици.онирования и устраняют ее в зависимости от величины коррекции, отличающийся тем, что, с целью повышения точности .коррекции ошибок позиционирования, в плоскойти сканирования задают контрольные точки в . направлении истинной линии сканирования, для каждой зеркальной поверхности многогранника измеряют отклонения положения точек относительно истинной линии скаршрования по двум координатам, по полученным значениям формируют и з.апоминают сигналы коррекции, производят коррекцию положения луча путем дополнительного изменения положения луча на величину коррекции, затем производят проверочные испытания, при которых выявляют погрешности коррекции, и изменяют величину ранее полученной коррекции в соответствии с полученными отклонениями положения луча и повторяют указанные операции до полной компенсации погрешности, после чего измененные величины коррекции для отдельных зеркальных поверхностей многогранника запоминают, а затем считывают и используют длякоррекции погрешностей позиционирования. 2.Спосрб по П.1, от л ич аю щ и и с я тем, что покоординатные (Л добавочные отклонения светового луча перед поточечным и построчным скас: нированием производят с помощью зеркального многогранника. 3.Способ по ;пп.1 и2, отличающийся тем, что для каждой зеркальной поверхности многогранника 4 интерполируют и запоминают из полученных величин коррекции функцию корсл рекции, которую считывают при работе CD 00 CD и используют для текущей коррекции погрешностей позиционирования. 4.Способ по пп.1-3, отличающийся тем, что отклонения по ложения световой точки относительно контрольной точки в двух перпендикулярно расположенных к направлению сканирования светочувствительных поверхностях определяют путем измерения двух фототоков, которые интегриР5ПОТ, и из интегрированных фототоков формируют разностный сигнал как значение координаты J .
. Изобретение относится к технике электронного репродуцирования, в частности к способам коррекции погрешностей позиционирования светового луча, отклоняемого при помощи отклоняющей системы с по меньшей мере одной зеркальной поверхностью поточечно и построчно на плоскости, перемещающейся перпендикулярно направлению отклонения, при котором погрешности позиционирования определяют и затем исправляют при помощи соответствующих значений коррекции.
Наиболее близким техническим решением к предлагаемому является способ коррекции погрешностей позиционирования многогранного поворотного зеркала, реализуемый устройством, в котором на пути луча между источником света и многогранным поворотным зеркалом расположен корректирующий дефлектор, при этом каждой зеркальной поверхности присваивается только одно значение коррекции, так что остаются неустранимыми погрешности, ..обусловленные неровностью зеркальных поверхностей Г 1Недостаток известного способа состоит в том, что точность коррекции невелика.
Цель изобретения - повьшение точности коррекции ошибок позиционирования.
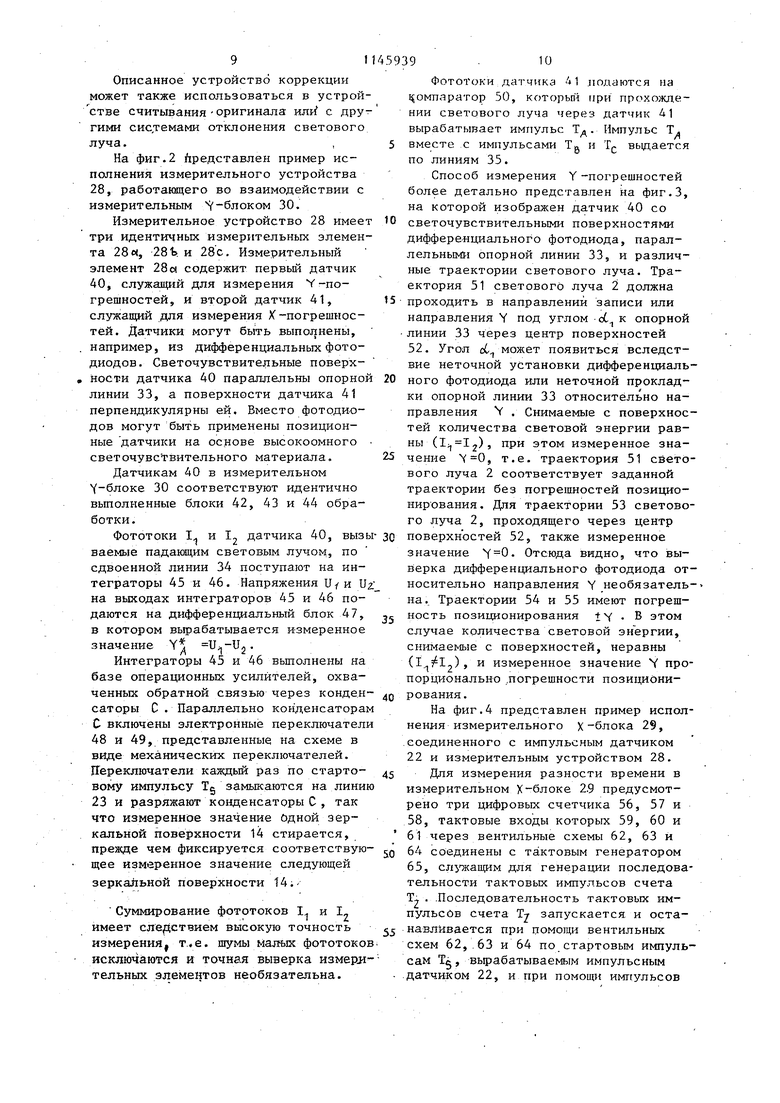
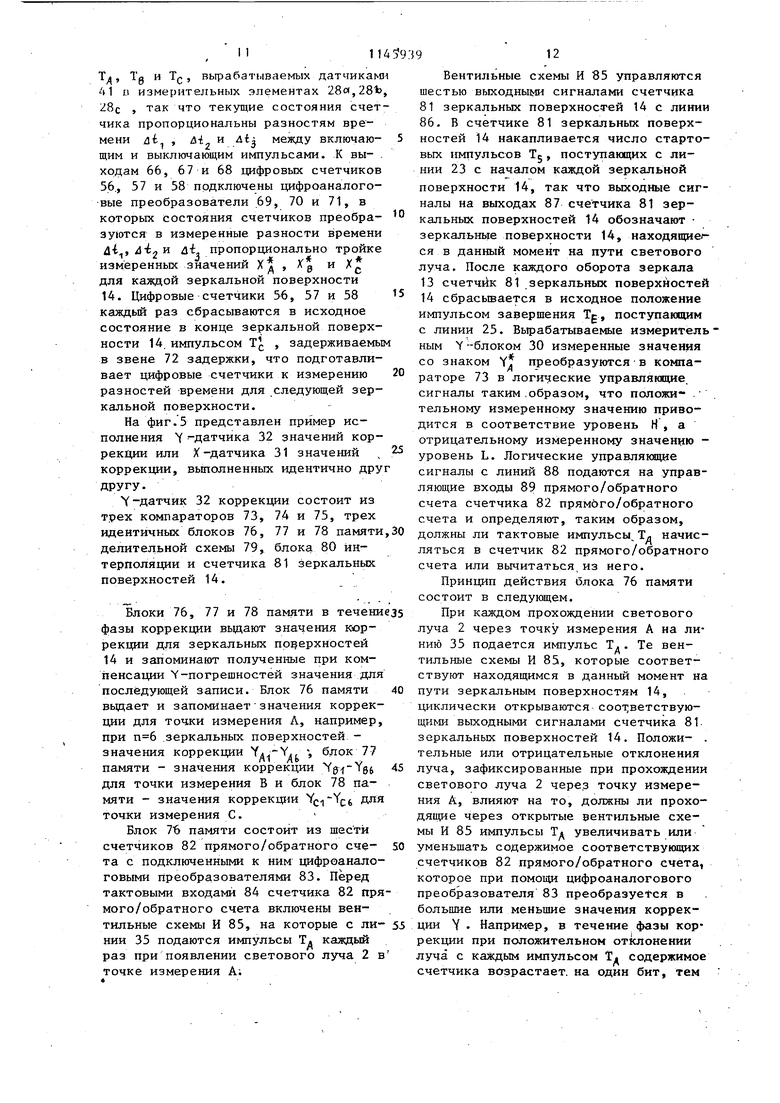
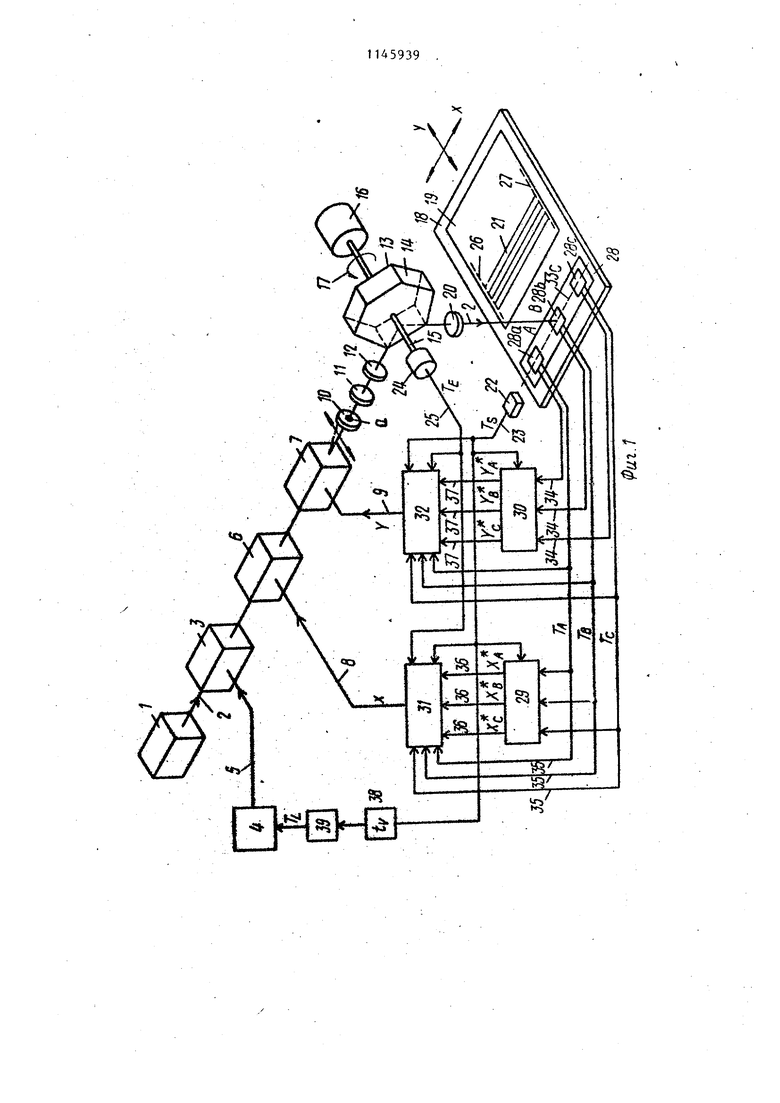
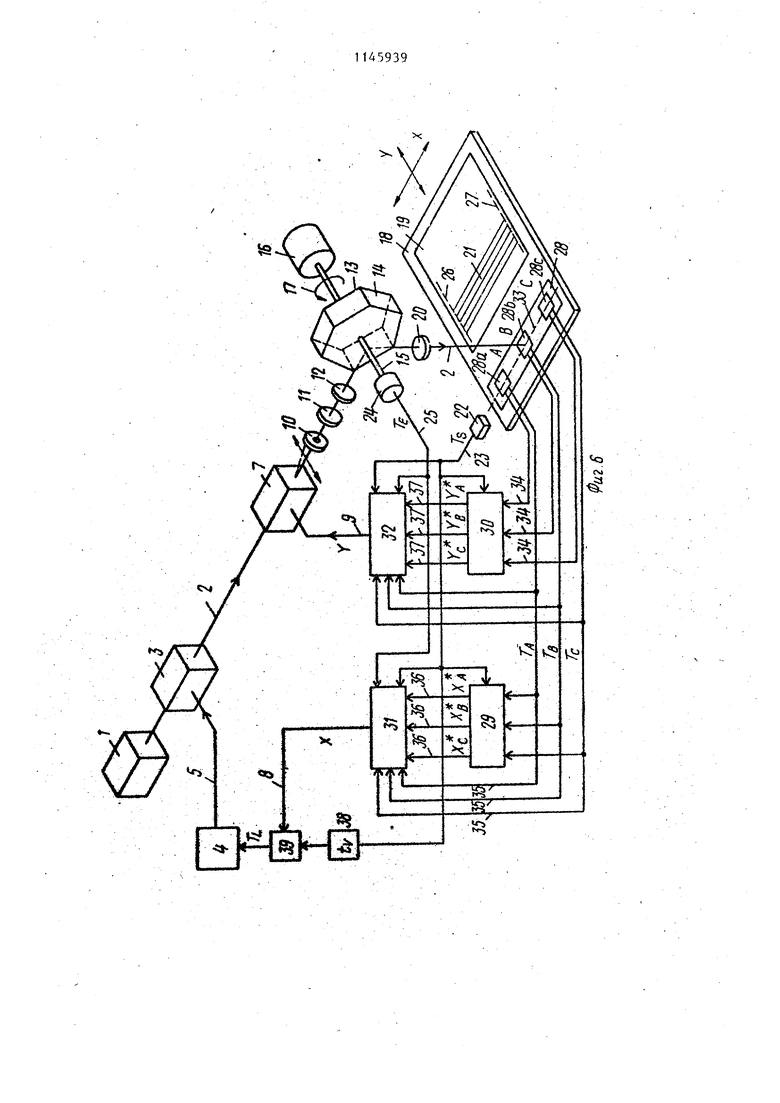
Указанная цель достигается тем, что cornacijo способу коррекции погрешностей позиционирования светового , заключающемуся в том, что световой луч отклоняют поточечно и построчно при помощи, зеркального многогранника в плоскости сканирования, которую перемещают относительно зеркального многогранника и поперек направления отклонения, после чего определяют погрешность позиционирования и устраняют ее в.зависимости от величины коррекции, в плоскости сканирования задают контрольные точки в направлении истинной линии сканирования, для каждой зеркальной поверхности многогранника измеряют отклонения положения точек относительно истинной линии сканирования по двум координатам, по полученным значениям формируют и запоминают сигналы коррекции, производят коррекцию положения луча путем дополнительного изменения положения луча навеличину коррекции, затем производят проверочные испытания, при которых выявляют погрешности кор 31 рекции, и изменяют величину ранее полученной коррекции в соответствии с полученньми отклонениями положения луча и повторянуг указанные операции до полной компенсации погрешности, после чего измененные величины коррекции для отдельных зеркальных поверхностей многогранника запоминают а затем считывают и используют для коррекции погрешностей пйзициониро- вэ.ния. Покоординатные добавочные отклонения светового луча перед поточечным и построчным сканированием про- изводят с помощью зеркального много гранника. Для каждой зеркальной поверхности многогранника интерполируют и за поминают из полученных величин коррекции функцию коррекции, которую считывают при работе и используют для текущей коррекции погрешностей позиционирования. Отклонения положения световой точки относительно контрольной Точки в двух перпендикулярно расположенных к направлению сканирования светочув ствительных поверхностях определяют путем измерения двух фототоков, кот рые интегрируют, и из интегрированных фототоков формируют разнрстный сигнал как значение координаты Y . Отклонения положения световой то ки от контрольных точек в напр,авлеНИИ сканирования определяют путем измерения времени движения световой точки между контрольными точками, .затем формируют сигнал разности apei мен движения как значение координаты X . Коррекцию положения информации изображения производят путем измене ния временной последовательности значений видеосигнала на соответств няцие величины коррекции. Временную йоследовательность вел чин видеосигнала изменяют с помощью управляемого величинами коррекции изменения задержки времени. Величины видеосигнала запоминают и посредством такта сигнала считьша ют, причем временную последовательность величин видеосигнала изменяют посредством управляемого величинами коррекции изменения частоты такта считывания. Считьшание величин видеосигнала осуществляют в начале строки поспед 94 . ством синХронизйрунлцего стартового импульса. На фиг.1 изображено,устройство записи с системой коррекции, реализующее предлагаемый способ; на фиг.2 - пример исполнения измерительного устройства и блок измерения У-погрешности, на фиг.З - графидеская схема измерения Y-погрешностей на фиг.4 - пример исполнения блока измерения X -погрешности, йа фиг.З пример исполнения датчика значений коррекции на фиг.6 и 7 - варианты исполнения устройства для реализации способа. Источник t света, например лазер, вьфабатывает.световой луч 2, интенсивность которого модулируется записываемой инфсфмацией в модуляторе 3 света. Модулятор 3 света может представлять собой, например, акустический модулятор. Записываемая информация выбирается из устройства памяти,например цифрового запоминающего устройства 4, и по линии 5 подается на модулятор 3 света. Промодулированный по интенсивности световой луч 2 отклоняется от оптической оси элементом 6 X -коррекции и расположенным за ним элементом 7 Y-коррекции для исправления погрешностей позиционирования. В качестве элементов 6 и 7 коррекции, управляемых на основе значений коррекции по линиям 8 и 9, могут использоваться световые дефлекторы, например акустооптические или другие типы световых дефлекторов. Для модуляции интенсивности и отклонения светового луча может также использоваться один общий акустооптический модулятор. Скорректированный световой луч2 через экран .10 с отверстиями с , слу- „ жащий для исключения паразитных световых лучей, и линзы 11 и 12, служащие для расширения светового луча 2, падает на вращающееся многогранное поворотное зеркало 13, имекщее п зеркальных поверхностей 14, ось 15 вращения которого направлена перпендикулярно оптической оси светового луча 2. В данном примере исполнения мйогограйнре поворотное зеркало 13 имеет п 6 зеркальных поверхностей. Двигатель 16 приводит в движение многогранное поворотное зеркало 13 в направлении, указанном стрелкой 17, с постоянной угловой скоростью. .51 На плоскостной подложке 18 расположен носитель 19 информации, например, В виде пленки. При помощи вращения многогранного поворотного зер кала 13 отражающийся от зеркальных поверхностей14 и фокусируемый объективом 20 на нрситель 19 информации световой луч постоянно отклоняется в направлении X (направлении строки) по носителю19 информации. Одновременно плоскостная подложка 1 вьшолняет периодическое или непрерьшное движение подачи в направлени Y (направлении подачи). Таким обра зом, отклоненньш световой луч 2 освещает на носителе 19 информации расположенные рядом строки 21. В данном случае при зеркальных поверхностей 14 в течение оборота зеркала запйсьшается, таким образом шесть строк 21. Расноложенньй вне плоской подлож ки 18 в плоскости отклонения светового луча 2 оптоэлектронный импульс ный датчик 22 при поступлении калодо го светового луча подает стартовый импульс Тд на линию 23, т.е. при зеркальных поверхностей 14 шесть стартовых импульсов Тд за оди оборот зеркала. Другой импульсный датчик 24, соединенньш с осью 15 вр щения многогранного поворотного зер кала 13, после каждого оборота зер- кала подает на линию 25 импульс завершения Tg. Непараллельность.зеркальных поверхностей 14 Инестабильность оси 15 вращения.вызывают отклонения положения записывакяцего светового луч 2 на носителе 19 информации, перпен дикулярные направлению записи, обоз начаемые далее как У-погрешности (позиционирования). Y-погрешности, на которые вследствие неровности зеркальных поверхностей 14 оказывает влияние направление записи, имеют следствием нера ные интервалы между строками. Разли чие , в углах меяоду соприкасающимися зеркальными поверхностями 14 обусло ливает то, что от строки к строке и меняется место начала и конца строк Неровности зеркальных поверхностей 14 ведут к отклонениям записывающег светового луча 2 от тех позиций на линии строки, на которых он должен быть к определенным моментам, т.е. нерав номерности угловой скорости 9. светового луча. Эти отклонения, далее называемые X-погрешностями (позиционирования) , имеют следствием искажения внутри строки. В то же время для хорошего качества записи необходимо, чтобы строки 21 начинались на условной линии 26, проходящей перпендикулярно направлению записи, и заканчивались на параллельной ей линии 27 и чтобы интервалы между строками были равны. Эти требования не могут быть выполнены без коррекции названных цогр шностей позиционирования. Устройство коррекции погрешностей позиционирования многогранного поворотного зеркала 13 состоит из измерительного устройства 28, X -блока 29 измерений, Y-блока 30 измерений, Х-датчика 31 значений коррекции и у-датчика 32 значений коррекции, а также из элемента 6 X.-коррекции и элемента 7 Y-коррекции, расположенных на пути луча между источником 1 света и многогранным поворотным зеркалом 13. Измерительное устройство 28 в виде измерительной планки в пределах рабочей ширины плоской подложки 18 имеет некоторое число измерительных элементов, расположенных по опорной линии 33 и предназначенных для определения отклонения луча в направлениях X и Y . В данном примере исполнения предусмотрено три измерительных элемента 28о(, 28Ь и 28с в точках измерения /1 , Б и С , причем измерительный элемент 28 расположен в области начала строки, измерительный элемент 28 - конца строки, измерительный элемент 28 - приблизительно в середине строки. Измерительное устройство 28 является неотъемлемой составной частью плоской подложки 18. В другом случае измерительное устройство 28 может быть помещено для измерений на плоскую подложку 18 или введено на путь луча вместо плоской подложки 18. Для определения погрешностей пози ционирования в пределах измерительной фазы перед записью, в течение которой многогранное поворотное зеркало 13 вращается, плоская подложка 18 сдвигается в направлении Y настолько, чтобы измерительные элементы 28о(, 28fc и 28с (фиг.1) находились в плоскости отклонения светового лу-
711
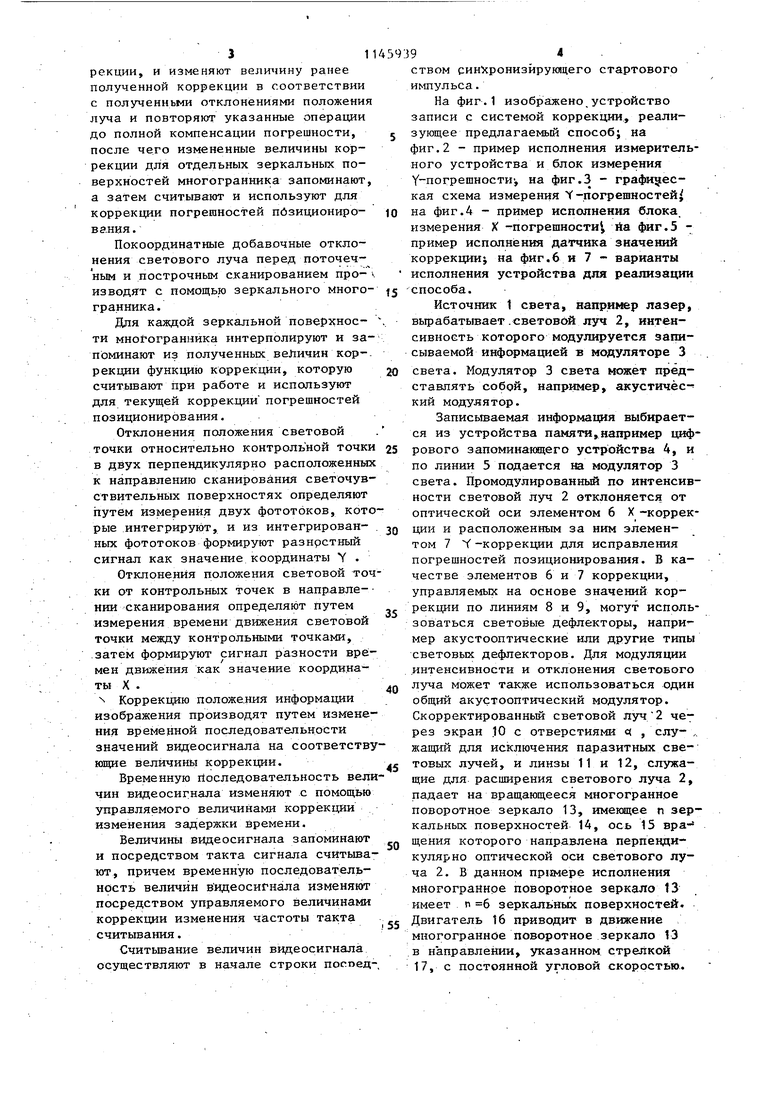
ча 2. Y -по1решности, измеренные в отдельных точках измерения Д , б и С вдоль направления записи измерительными элементами 28а, 28Ъ и 28с, по сдвоенным линиям 34 передаются на Y-блок 30 измерений и преобразуются в нем в тройку измеренных значений Y, g и V для каждой зеркальной поверхности 14.
Для определения Л -погрешностей проводятся измерения разности времени пробега светового луча 2 между импульсным датчиком 22 и измерительным элементом 28 а ( ui ), между измерительными элементами 28а и 28 Ь (difl) J 3 также между измерительными элементами 28 Ь и 28с (4i,). Импульсы, отмеченные в импульсном датчике 22 и измерительных элементах 28й,28Ъ и 28с при пересечении их световым лучом 2, передаются на X-блок 29 измерений по линии 23, а также поступают на линии 35 и используются там для измерения разности времени. Измеренные разности времени ui, uti и aij преобразуются в тройку измеренных значений Сд, Хд )( для каждой зеркальной поверхности 14.
В течение примыкающей к измерительной фазе фазы коррекции Х-датчик 31 значений коррекции и Y-датчик 32 значений коррекции вырабатывают возрастающую внаправлении требуемой коррекции тройку значений коррекции Хд, Х и Х (; , а также Чд , Ч и YC,которые последовательно ив соответствии с находящимися и данный
момент на пути луча зеркальнь ми поверхностями 14 по линиям 8 и 9 подаются на Хг лемент 6 коррекции-и Y-элемент 7 коррекщги.
Элементы 6 и 7 коррекции лернодлчески корректируют погрешности позицио1(иро)зания, причем процесс коррекции контролируется измерительным уст ройством 28, Для этого каждый раз TpoJJKH измерепнык значений X, Xg и V и Y , Y V, .-, . кую;-д-1е И1хол.я;. . .мь;й --:.;«;;;- H-i пути .пума Ук;..И:-:-1 i;oBHj./-.i-:----v 14, r;u -() и ;;o;i; ;T a ii;; / -;3,i4Hi, i 1 y9.jl4 ;;inii i:-v.;i,.- i;. ;i,;iii ii / ,i:r; :jIj;:fJn:HH,l ,:..,;;{,
,;;);: :i.j./;,,i::i; (-i,;.-;;-: :.,...,., .l Jt;Ufifi. iJJ .UjftlfM 1- )ЦИИ ч (1НГ: ijlliJtM.iJMn ls.)tJi i:iHIJii Hd ЧЛеМ«} Г1,1 ) И / к (,.К)11И «:)jtl/l O|fti f.
)UtHii -ii MHO) огрйкно) . )1Гйо1 оГно1о
8
зеркала 13 управляется подачей стаитового импульса Т на линию 23 и подачей импульса завершения Tg на линию 25.
Периодическая коррекция погрешностей позиционирования продолжается до тех пор, пока измеренные отклонения не будут скомпенсированы. Получаемые при этом значения коррекции запоминаются в ,соответствующих датчиках 31 и 32 значений коррекции и вьщаются в течение специальной паузы в записи для коррекции погрешностей позиционирования.
Область значений коррекции может лежать между и Y t, причем значению коррекции соответствует максимальное отклонение светового луча в направлении -Y , значени о коррекции У:: Yf,i - в направлении + , а значению коррекции /2 - нулевЬе отклонение.
В течение фазы записи стартовые импульсы задерживаются в блоке 38 задержки на ,время, соответствующее времени пробега светового луча 2 между импульсным датчиком 22 и желаемым местом начала строки на носителе 19 информации.
Тактовый генератор 39 вырабатывает тактовый импульс считывания для цифрового запоминающего устройства i. Каждьо задержанный стартовый импульс Тс заново запускает такт считывания, так что первая информация изображения строки всегда считывается н записывается точно в выбранный момент старта строки.
В предпочтительном исполнении X-датчик 31 значений коррекции и Yдатчик 32 значений коррекции имеют по одному блоку интерполяхщи, в которых из ка;кдой тройки значений коррек 1,ии Хд , Хц и Y или у, Y и У. путем интерполяции для каждой чPJ)к,4.111,ной поверхности выводится фупкияя )сК11.ии X f ( X 1 или com-
;.:.,,, .-.Jr-MilOI : / ) , I.SK ,ТО ;31Ш КЯЖ
.: :-MU : Ijn.ijt ijcTOBMo луча. 2
:П - - ;-4e:.i(; КО1.реКШ И .
;,,:;., . -iiii-i, :: и(;:Д каждой
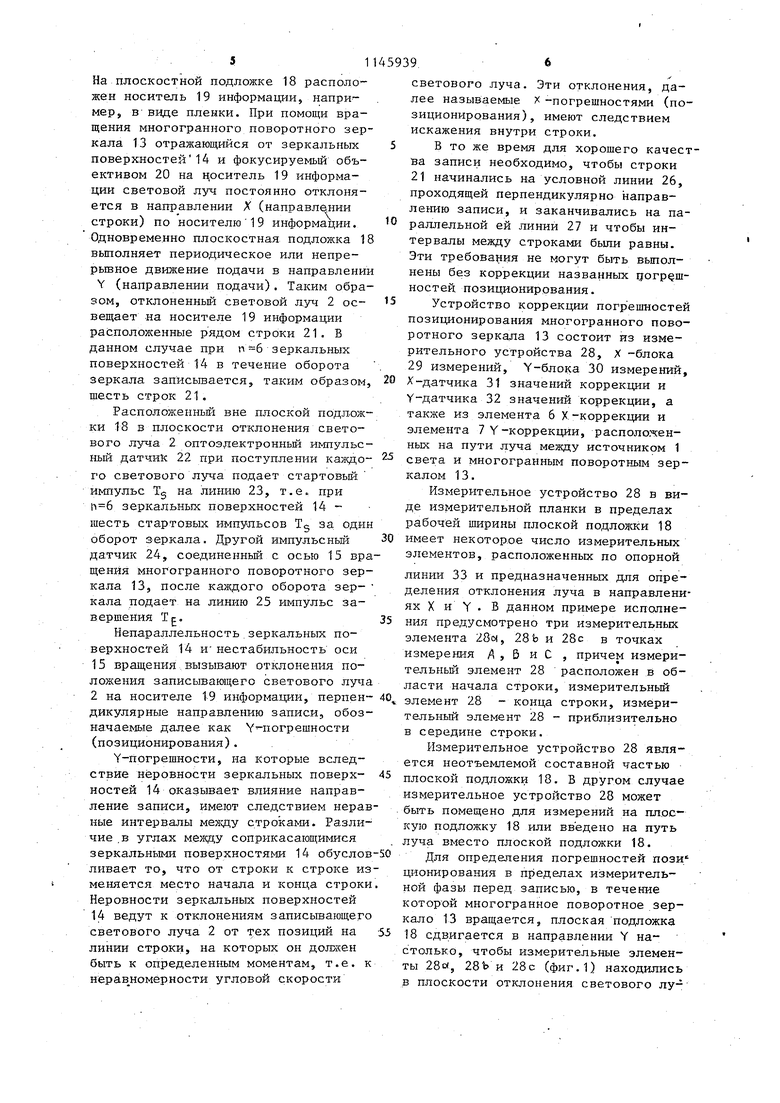
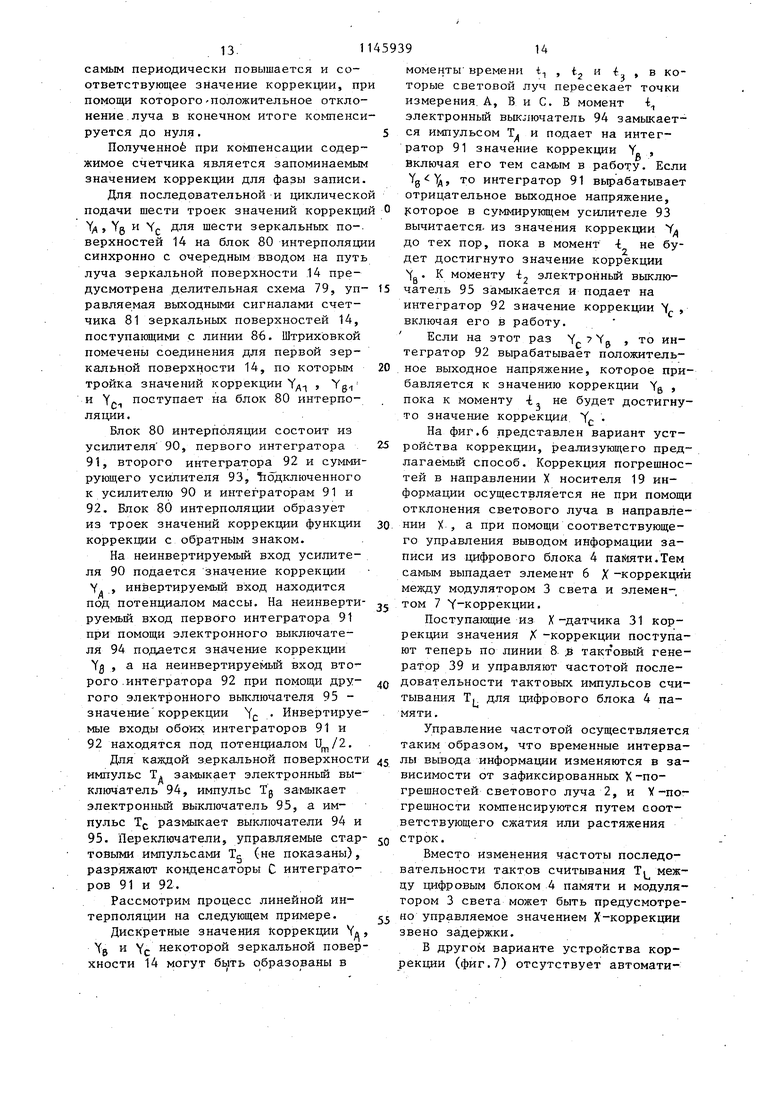
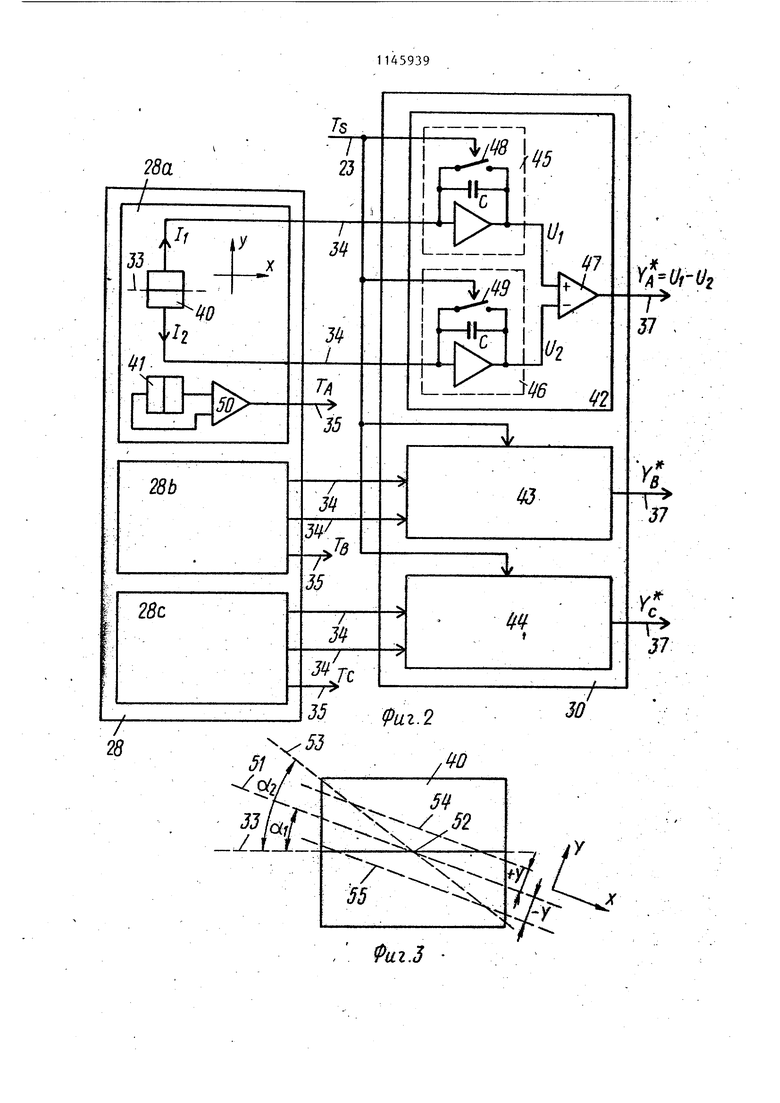
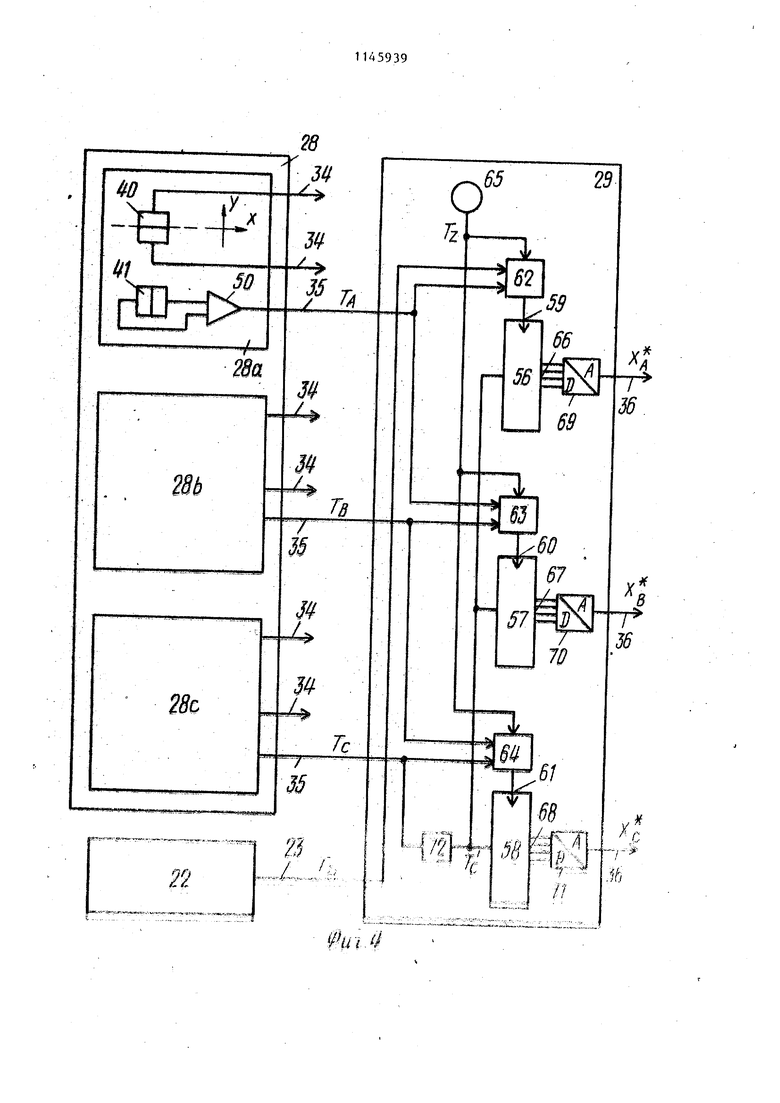
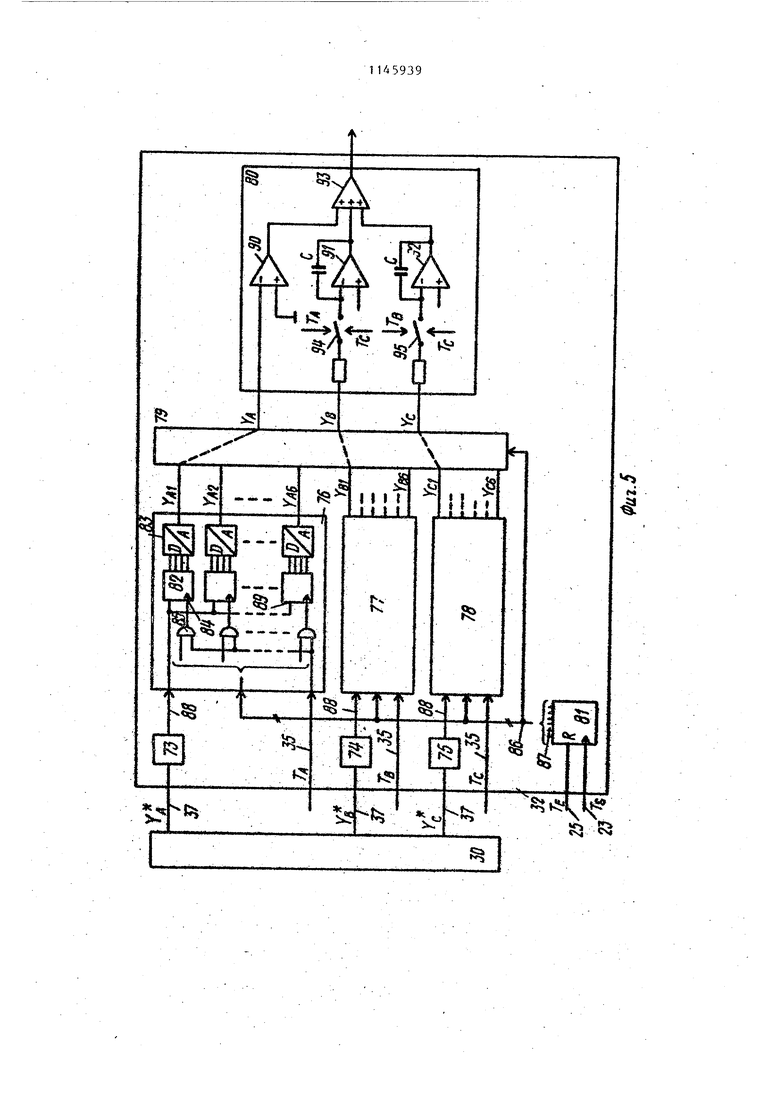
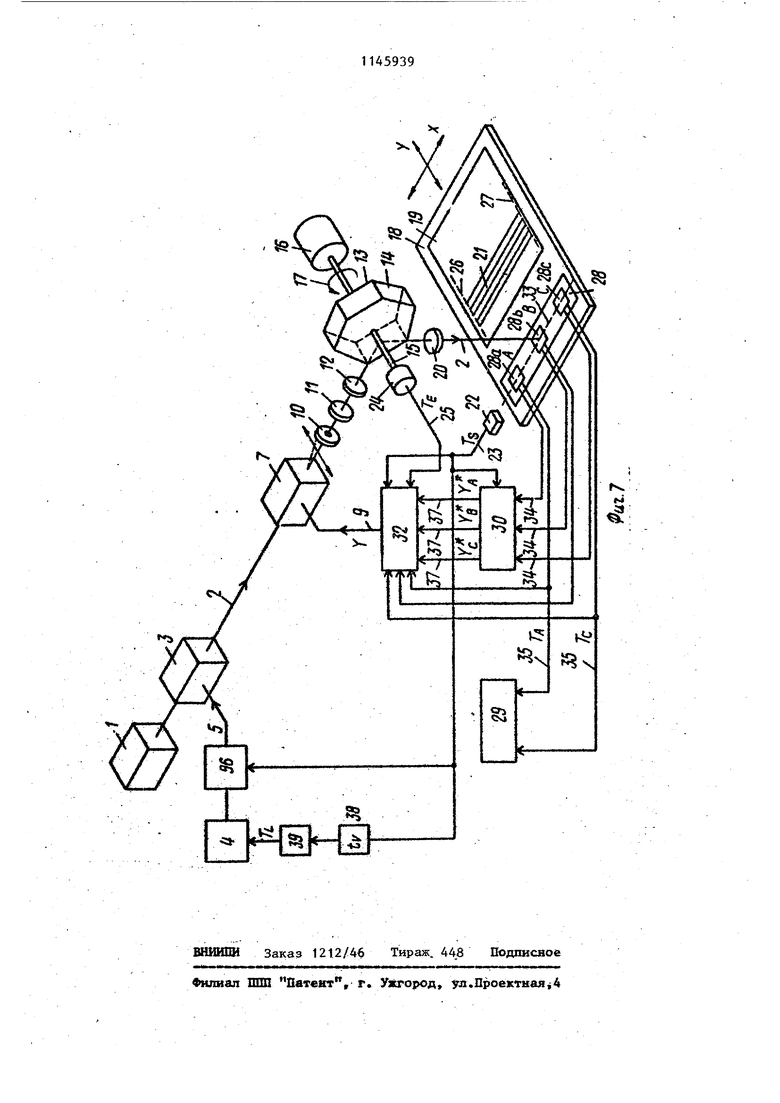
; ,.; -.-I ;,.:-Й ;;.:-p .-i-.T-il П ВОЯИТСЯ ..; j.;,i;iii;.;i ;;:;) i-t и. отк .1; -ii/i t. .inMii)i-ii|.ynj)CH iiorjsemnocTH i-Hyi i).,i;.iH.Hi)i.)(- H/j(;iiii(:TbK : рркальньгх i(4)j-j)...i(rTfu, я ПО гигаючся вь сокий iivia iTJif I oMHii.Tii. Описанное устройство коррекции может также использоваться в устройстве считыванияоригинала ил с другими системами отклонения светового луча. На фиг.2 представлен пример исполнения измерительного устройства 28, работающего во взаимодействии с измерительным -блоком 30. Измерительное устройство 28 имеет три идентичных измерительных элемента 28 е(, 28Ъ. и 28с, Измерительный элемент 28о( содержит первый датчик 40, служшций для измерения Y-погрешностей, и второй датчик 41, служащий для измерения X-погрешностей. Датчики могут быть выполнены, . например, из дифференциальных фотодиодов. Светочувствительные поверх. Ности датчика 40 параллельны опорной линии 33, а поверхности датчика 41 перпендикулярны ей. Вместо фотоди-одов могут быть применены позиционные датчики на основе высокоомного светочувствительного материала. Датчикам 40 в измерительном у-блоке 30 соответствуют идентично выполненные блоки 42, 43 и 44 обработки. Фототоки 1 и 1 датчика 40, вызы ваемые падакяцим световым лучом, по сдвоенной линии 34 поступают на интеграторы 45 и 46. Напряжения и/и U на выходах интеграторов 45 и 46 подаются на дифференциальный блок 47, в котором вырабатывается измеренное значение Y . Интеграторы 45 и 46 вьшолнены на базе операционных усилителей, охваченных обратной связью через конден саторы С . Параллельно конденсаторам С включены электронные переключатели 48 и 49, представленные на схеме в виде механических переключателей. ГГереключатели каждый раз по стартовому импульсу Tg замыкаются на линию 23 и разряжают конденсаторы С, так что измеренное значение Одной зеркальной поверхности 14 стирается, преяоде чем фиксируется соответствую щее измеренное значение следующей зеркальной поверхности 4;/ Суммирование фотртоков 1 и 1„ имеет сле ствием высокую точность 55 измерения, т..е. шумы малых фототоков. исключаются и точная выверка измерл тельных элементов необязательна. 1 9 . 10 Фото1Ч:)ки датчика 41 лодаются на цомпаратор 50, которьй при прохождении светового луча через датчик 41 вырабатывает импульс Тд. Импульс Т. вместе с импульсами Tg и Tj. выдается по линиям 35. Способ измерения Y-погрешностей более детально представлен на фиг.З, на которой изображен датчик 40 со светочувствительными поверхностями дифференциального фотодиода, параллельнымн опорной линии 33, и различные траектории светового луча. Траектория 51 светового луча 2 должна проходить в направлений записи или направления Y под углом оС к опорной линии 33 через центр поверхностей 52. Угол оС может появиться вследствие неточной установки дифференциального фотодиода или неточной прокладки опорной линии 33 относительно направления V . Снимаемые с поверхностей количества световой энергии равны (), при этом измеренное значение 0, т.е. траектория 51 светового луча 2 соответствует заданной траектории без погрешностей позиционирования . Для траектории 53 светового луча 2, проходящего через центр поверхностей 52, также измеренное значение Y-O. Отсюда видно, что выверка дифференциального фотодиода относительно направления Y необязательна. Траектории 54 и 55 имеют погрешность позиционирования iv . В этом случае количества световой энергии, снимаемые с поверхностей, неравны (), и измеренное значение Y пропорционально .погрешности позиционирования. На фиг.4 представлен пример исполнения измерительного X-блока 29, соединенного с импульсным датчиком 22 и измерительным устройством 28. Для измерения разности времени в измерительном X-блоке 2.9 предусмотрено три цифровых счетчика 56, 57 и 58, тактовые входы которых 59, 60 и 61 через вентильные схемы 62, 63 и 64 соединены с тактовым генератором 65, сл ткащим для генерации последовательности тактовых импульсов счета Т,. .Последовательность тактовых импульсов счета Tj запускается и остаиавлйвается при помощи вентильных схем 62,.63 и 64 по стартовым импульсам Т, вырабатываемым импульсным датчиком 22, и при помощи имггульсов Т, Tg и Tf., вырабатываемых AaT4HKaNO 41 n измерительных элементах 28ot,28b 28с так что текущие, состояния счет чика пропорциональны разностям времени , ui и Л1 между включающим и выключающим импульсами. К выходам 66, 67 и 68 цифровых счетчиков 56., 57 и 58 подключены цифроаналоговые преобразователи 69, 70 и 71, в которых состояния счетчиков цреобразуются в измеренные разности времени пропорционально тройке измеренных значений Х , Хд и X для каждой зеркальной поверхности 14. Цифровые счетчики 56, 57 и 58 каждьй раз сбрасываются в исходное состояние в конце зеркальной поверхности 14, импульсом Tj. , задерживаемы в звене 72 задержки, что подготавливает цифровые счетчики к измерению разностей времени для следующей зеркальной поверхности. На фиг.5 представлен пример исполнения Y -датчика 32 значений коррек1щи или X-датчика 31 значений , коррекции, выполненных идентично дру другу. -датчик 32 коррекции состоит из трех компараторов 73, 74 и 75, трех идентичных блоков 76, 77 и 78 памяти делительной схемы 79, блока 80 интерполяции и счетчика 81 зеркальных поверхностей 14. БЛОКИ 76, 77 т 78 памяти в течени фазы коррекции вьщают значения коррекции для зеркальных поверхностей 14 и запоминают полученные при компенсации Y-погрешностей значения для последующей записи. Блок 76 памяти вьщает и запоминаетзначения коррекции для точки измерения Л, например, при .зеркальных поверхностей значения коррекции ,, , блок 77 памяти - значения коррекции для точки измерения В и блок 78 памяти - значения коррекции Рточки измерения С. Блок 76 памяти состоит из шести счетчиков 82 прямого/обратного счета с подключенными к ним цифроаналоГовыми преобразователями 83. Перед тактовыми входами 84 счетчика 82 пря мого/обратного счета включены вентильные схемы И 85, на которые с лиНИИ 35 подаются импульсы Т. каждый раз при появлении светового луча 2 в точке измерения А; 912 Вентильные схемы И 85 управляются шестью выходными сигналами счетчика 81 зеркальных поверхностей 14 с линии 86. В счетчике 81 зеркальных поверхностей 14 накапливается число стартовых импульсов Tg, поступающих с линии 23 с началом каждой зеркальной поверхности 14, так что выходные сигналы на выходах 87 счетчика 81 зеркальных поверхностей 14 обозначают зеркалbHbie поверхности 14, находящие/ся в данный момент на пути светового луча. После каждого оборота зеркгша 13счетчик 81 зеркальных поверхностей 14сбрасьшается в исходное положение импульсом завершения Тс, поступающим с линии 25. Вьфабатываемые измеритель ным Y блоком 30 измеренные значения со знаком Vt преобразуютсяв компараторе 73 в логические управляющие. сигналы таким.образом, что положи- . тельному измеренному значению приводится в соответствие уровень Н , а отрицательному измеренному значению уровень L. Логические управляющие сигналы с линий 88 подаются на управляющие входы 89 прямого/обратного счета счетчика 82 прямого/обратного счета и определяют, таким образом, должны ли тактовые импульсы Т начисляться в счетчик 82 прямого/обратного счета или вычитаться, из него. Принцип действия блока 76 памяти состоит в следующем. При каждом прохождении светового луча 2 через точку измерения А на линию 35 подается импульс Т.. Те вентильные схемы И 85, которые соответствуют находящимся в данный момент на пути зеркальным поверхностям 14, циклически открываются соо1;ветствующими выходными сигналами счетчика 81. зеркальных поверхностей 14. Положи- . тельные или отрицательные отклонения луча, зафиксированные при прохождении светового луча 2 чере.з точку измерения А, влияют на то, должны ли проходящие через открытые вентильные схемы И 85 импульсы Тд увеличивать или уменьшать содержимое соответствующих счетчиков 82 прямого/обратного счета, которое при помощи цифроаналогового преобразователя 83 преобразуется в большие или меньшие значения коррекции Y . Например, в течение фазы коррекции при положительном отклонении луча с каждым импульсом Т. содержимое счетчика возрастает, на один бит, тем самым периодически повышается и соответствующее значение коррекции, при помощи которогоПоложительное отклонение, луча в конечном итоге компенсируется до нуля. Полученное при компенсации содержимое счетчика является запоминаемым значением коррекции для фазы записи. Для последовательной и циклической подачи шести троек значений коррекций Х 5 и YC для шести зеркальных по-. верхностей 14 на блок 80 интерполяции синхронно с очередным вводом на путь луча зеркальной поверхности 14 предусмотрена делительная схема 79, управляемая выходными сигналами счетчика 81 зеркальных поверхностей 14, поступающими с линии 86. Штриховкой помечены соединения для первой зеркальной поверхности 14, по которьм тройка значений коррекции Уд. , Yg., и УЛ поступает на блок 80 интерполяции. Блок 80 интерполяции состоит из усилителя 90, первого интегратора 91,второго интегратора 92 и суммирующего усилителя 93, подключенного к усилителю 90 и интеграторам 91 и 92.Блок 80 интерполяции образует из троек значений коррекции функции коррекции с обратным знаком. На неинвертируемьй вход усилителя 90 подается значение коррекции Y. , инвертируемый вход находится под потенциалом массы. На неинверти руемый вход первого интегратора 91 при помощи электронного выключателя 94 подается значение коррекции Yg , а на неинвертируемьй вход вто рого.интегратора 92 при помощи другого электронного выключателя 95 значение коррекции У . Инвертируе мые входы обоих интеграторов 91 и 92 находятся под потенциалом /2. Для каждой зеркальной поверхност импульс Тд замыкает электронньй выключ-атель 94, импульс Tg замыкает злектронньй выключатель 95, а импульс TC размыкает выключатели 94 и 95. Переключатели, управляемые стар товыми импульсами Tg (не показаны), разряжают конденсаторы С интеграторов 91 и 92. Рассмотрим процесс линейной интерполяции на следующем примере. Дискретные значения коррекции У Уц и Ур некоторой зеркальной повер хности 14 могут образованы в 114 914 моменты времени i , i, и i., моменты времени i -| , vj п а ВКО торые световой луч пересекает точки измерения. А, В и С. В момент -t электронный выключатель 94 замыкается импульсом Т и подает на интегратор 91 значение коррекции У„ , включая его тем самым в работу. Если , то интегратор 91 вырабатывает отрицательное выходное напряжение, {соторое в суммирующем усилителе 93 вычитается, из значения коррекции Ул до тех пор, пока в момент -t не будет достигнуто значение коррекции X К моменту -i, электронньй выключатель 95 замыкается и подает на интегратор 92 значение коррекции у , включая его в работу. Если на этот раз У. 7 У , то интегратор 92 вырабатывает положительное выходное напряжение, которое прибавляется к значению коррекции Уц , пока к моменту i не будет достигнуто значение коррекции У . На фиг.6 представлен вариант устройства коррекции, реализующего предлагаемьй способ. Коррекция погрешностей в направлении X носителя 19 информации осуществляется не при помощи отклонения светового луча в направлении X , а при помощи соответствующего управления выводом информации записи из цифрового блока 4 пайяти.Тем самым выпадает элемент 6 X -коррекции между модулятором 3 света и элемен-, том 7 у-коррекции. Поступающие из X-датчика 31 коррекции значения X -коррекции поступают теперь по линии 8. .в тактовый генератор 39 и управляют частотой последовательности тактовых импульсов считывания Тц для цифрового блока 4 памяти. Управление частотой осуществляется таким образом, что временные интерна- лы вывода информации изменяются в зависимости от зафиксированных X-погрешностей светового луча 2, и У-погрешности компенсируются путем соответствующего сжатия или растяжения строк. Вместо изменения частоты последовательности тактов считывания f межцу цифровым блоком 4 памяти и модулятором 3 света может быть предусмотрено управляемое значением Х-коррекции звено задержки. В другого варианте устройства коррекции (фиг.7) отсутствует автомата1511ческая компенсация X-погрешностей. Между цифровым блоком 4 памяти и модулятором 3 света расположена линия 96 задержки, управляемая значениями коррекции. В упрощенном измерительном блоке 29 для всех зеркальных поверхностей 14 многогранного поворотного зеркала 13 путем временных измерений при помощи импульсов Тд и TC между точками измерения А и С снтределяются соответствунщие длины строк 2 и на их основе определяются соответствующие разности длин строк Z. Полуразчности длин строк 4Z/2 для каждой зеркальной поверхности многогранного поворотного зеркала вводятся в линию задержки в ка:честве значений коррекции 9 Во время записи хранимые в памяти значения коррекции под управлением стартовых импульсов вызываются на линии 23 синхронно с оборотом зеркала, и данные записи, считываемые из цифрового устройства 4 памяти в каждои строке (а значит, сама записьгоаемая строка) сдвигаются относительно первой строки настолько, что соответствующая погрешность дли-, ны строки каждый раз распределяется на начало и конец строки. Предлагаемьм способ повьппает точность коррек1Ц1И ошибок позициониро-. вания.
.J
й//.,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4002830, кл | |||
| Зажим для канатной тяги | 1919 |
|
SU358A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
