Изобретение относится к способам контроля и измерения характе ристик тракта звуковоспроизводящих устройств в динамическом режи ме на реальном сигнале.
В известных способах контроля нелинейности тракта звуковоснро изводящих устройств в динамическом режиме на реальном сигнале ис следуют только количественную сторону нелинейного процесса (нро дукты нелинейности).
Особенность предлагаемого способа состоит в применении извест ных математических способов аппроксимации характеристики нелиней ности к измерению и контролю электрических свойств исследуемого не линейного тракта. Для этого применяют электронное счетно-решаю щее устройство непрерывного действия, производящее определение ко эффициентов ряда, аппроксимирующего эту характеристику путем по следовательного дифференцирования выходного сигнала исследуемогс устройства по входному и выделения постоянных составляющих носле довательных производных, которые и будут коэффициентами искомогс ряда.
Технический эффект заключается в том, что таким путем получают качественную характеристику нелинейности тракта (вид нели нейности, наблюдаемой в тракте).
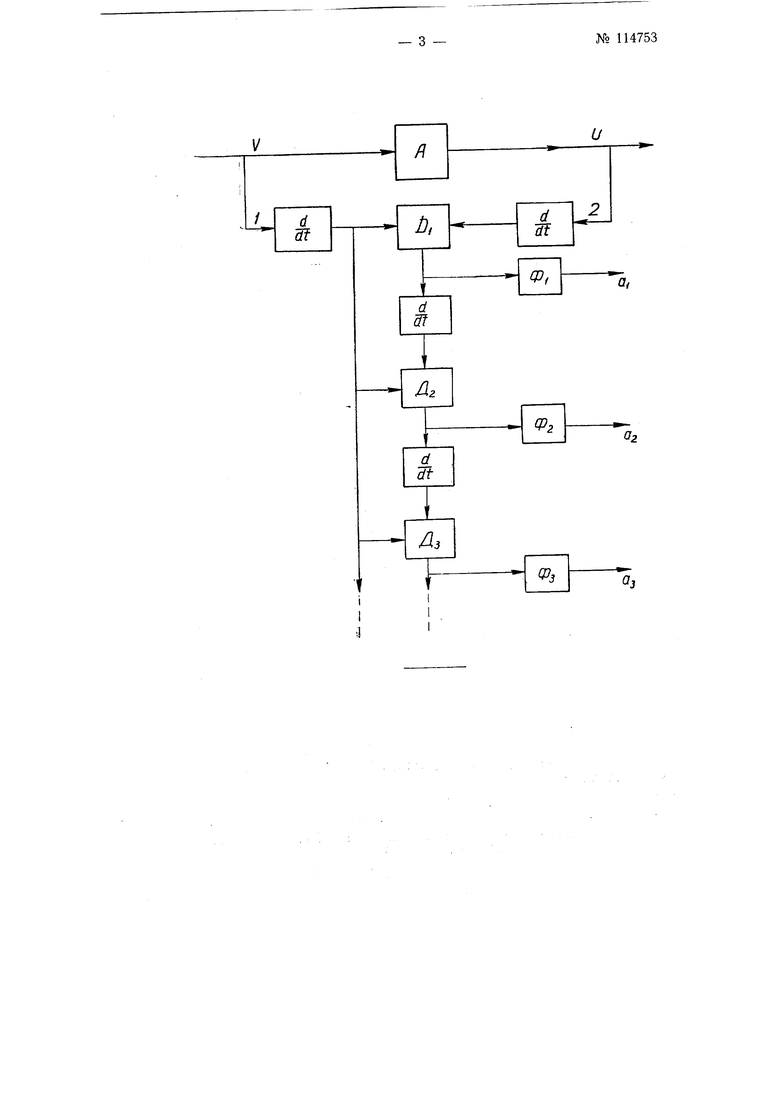
Сущность изобретения поясняется блок-схемой автоматическогс контроля характеристики в динамическом режиме.
Известно, что характеристика любого нелинейного устройства может быть представлена степенным рядом;
t/ № + ai 1/+ ааУз + - . . /(V),
где и W. V - соответственно напряжения на входе и выходе исследуе мого устройства, а коэффициенты «/ (i 2,3 . . .) определяют искаже ния выходного сигнала. С помощью фильтра или интегратора выделяю
№ 114753
постоянную составляющую выходного сигнала, которая есть коэффициент йо- Затем дифференцируется выходной сигнал по входному и определяется первая производная U. Из этого сигнала выделяют постоянную составляющую, которая определит коэффициент передачи сигнала йь Последующее дифференцирование с получением производных U, V и т. д. и выделение постоянных составляющих определяет коэффициенты QZ, из и т. д., характеризующие нелинейные искажения исследуемого тракта.
Устройство для контроля нелинейности тракта имеет два входа / и 2. На вход 1 подается сигнал V со входа чсследуемого четырехполюсника Л, а на вход 2 сигнал U с выхода этого четырехполюсника.
Сигналы дифференцируются в устройствах ,т последовательно столько раз, сколько коэффициентов ряда необходимо определить. На выходе делителя Дь Лч, Дз ((после каждого дифференцирования) включен фильтр (Фь Ф, Фз) или-интегратор, который выделяет постоянную составляющую, то есть соответствующий коэффициент ряда (а, Яз, из . «/} Оба входа устройства делают высокоомными, чтобы контрольное устройство не влияло на исследуемый четырехполюсник.
Описанный способ может использоваться для контроля нелинейно;ти тракта в динамическом режиме. Прибор подключается своими входами к выходу и входу исследуемого четырехполюсника, а на выходе 7рибора получают постоянные напряжения, пропорциональные коэффициентам ряда, который аппроксимирует характеристику исследуемого четырехполюсника. Выходные напряжения можно измерять каким-либо трибором, в этом случае будут известны численные значения коэффициентов, или можно просто, проградуировав прибор, поставить на его выходе устройство, которое будет подавать сигнал тревога в том случае, югда характеристика системы изменится на заданную величину.
Предмет изобретения
Способ контроля нелинейности электрической характеристики нелинейного устройства в динамическом режиме на реальном сигнале путем шпроксимации нелинейной характеристики степенным полиномом с полощью электронного счетно-рещающего устройства, отличающий:я тем, что, с целью получения непрерывной характеристики нелинейюсти тракта, аппроксимируют характеристику нелинейности путем оп)еделения коэффициентов степенного ряда последовательным дифференШрованием выходного сигнала исследуемого устройства по входному и 5ыделяют постоянные составляющие последовательных производных, шляющиеся коэффициентами искомого ряда.