Do О 4
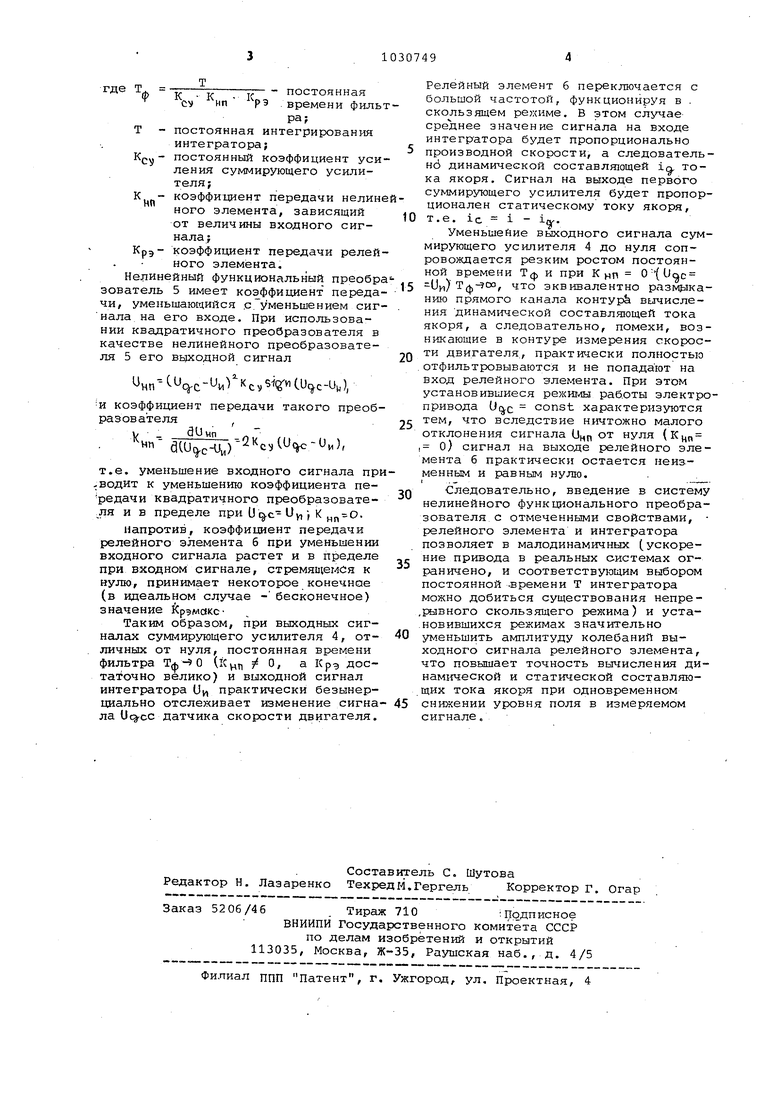
;о 1 -Изобретение относится к электровехнике и может быть использовано В: системах управления электроприводами постоянного тока, в частности в системах управления электроприводами наматывающих и разматывающих устройств, скорость вращения которы регулируется при постоянном статическом токе, и которое могут быть использованы также для построения гзстатических систем управлении скоростью электропривода. Известны устройства для измерени статической составляющей тока якоря содержащее дополнительный электродвигатель постоянного тока, работаю щий вхолост.та, причем измерение ста тической составляющей производится с-равнением полного тока рабочего двГШателя постоянного тока с током якоря дополнительного двигателя С1. Известны также устройства для из, мёрения статической составляющей то якоря на основе применения датчика дйнагдического тока якоря, причем последний выполнен в виде RLC -цепоч ки, включенной на зажимы двигателя постоянного тока, либо дифференцирующей НС-цепочки (дифференцирующего операционного усилителя}, вклвзченной на выходе тахогенератора 2 И и 4 . Наиболее близкшл к предлагаемому по технической сущности является устройство для шмерения статической составляЕощей тока якоря двигателя постоянного тока, содержащее датчик полного тока якоря, датчик скорости вращения двигателя (тахогенератор), дифференцирующее звено, под ключенное к выходу датчика скорости и суммирующий усилитель, к входам которого подключены датчик полного тока якоря и выход дифференцирующего звена 5. Вычисление динамической составля ющей тока якоря с применением диффе ренцирующего звена приводит к зна чительной погрешности измерения, по кольку сложно реализовать операцию дифференцирования, близкую к идеаль ной, достаточно простыми средствами Пульсации тахогенератора и помехи 3 канале измерения скорости, ijoпадающие на вход ,дифференцирующего звена, приводят к значктельному уровню помех измеряемого динамичеакого тока и статической составляизще тока якоря. Высокий уровень помех требует применения фильтрующих устройств на выходе устройства для измерения статической составляющей тока якоря, что приводит к искажению измеряемого сигнала и, как след ствие, к низкому качеству функционирования систем авторегулнрования электроприводов, использующих этот датчик. Целью изобретения является повышение точности измерения и снижение уровня помех в измеряемом сигнале. . Поставленная цель достигается тем, что устройство для вычисления динамической составляющей- якорного тока выполнено в виде последовательно включенных вт.орого cy 4миpyIOщeгo усилителя, нелинейного функционального преобразователя, релейного элемента и интегратора, причем выходы датчика скорости вращения двигателя и интегратора .подключены к входам второго суммирующего усилителя, а выход релейного элемента подключен к входу первого .lиpyющeгo усилителя. На чертеже представлено предлагаемое устройство,. Устройство содержит первый сумг-гарующий усилитель 1, к входам которого подключены выходы датчика 2 пол-ного тока якоря и устройства 3 для вычисления динамической составляющей якорного тока, состоящего из последовательно включенных второго суммирующего усилителя 4, нелинейного функционального преобразователя 5, релейного элемента 6 и интегратора 7, пр.ичем выходы датчика 8 скорости двигателя и интегратора 7 подключены к входам второго суммирующего усилителя 4, а выход релейного элемента б подключен к входу первого суммирующего усилителя 1. В установившихся режимах работы электропривода, когда скорость вращения двигателя и сигнал (J о-с на выходе датчика 8 скорости постоянны, среднее значение сигнала на выходе релейного элемента б равно нулю, величина напряжения 1) на выходе интегратора 7 постоянна и равна напряжению на выходе датчика 8 скорости, В этом случае значение измеряемой статической составляющей i тока якоря равно сигналу датчика полного тока i якорЯ, т.е. i,, В динамических расчетах работы изменение скорости двигателя вызовет появление не равного нулю сигнала на выходе суммирующего усилителя 4 и нелинейного фуьцсционального преобразователя 5. При этом на входе релейного элемента 6 появится напряжение, причем такой полярности, что сигнал на выходе интегрирующего усилителя 7 стремится уменьшить по абсолютной величине сигнал на выходе суммирующего усилителя 4. Напряжение: на выходе интегратора в операторной форме может быть записано в виде (t - frfTr qcW, где Т - постоянная времени филь ра; постоянная интегрирования интегратора; постоянный коэффициент уси ления суммирующего усилителя ; коэффициент передачи нелин ного элемента, зависящий от величины входного сигнала;коэффициент передачи релей ного э лемё н та, Нелинейный функциональный преобр зователь 5 имеет коэ ффициент переда чи, уменьшающийся .с уменьшением сиг нала на его входе. При использовании квадратичного преобразователя в качестве нелинейного преобразователя 5 его вь ходной сигнал нп-- Чс- су5 ГЧис с-и,), и коэффициент передачи такого преоб разователя ) т.е. уменьшение входного сигнала пр -водит к уменьшению коэффициента пе редачи квадратичного преобразовате ля и в пределе при U (с-Uy,-, К „„ о. Напротив, коэффициент передачи релейного элемента б при уменьшении входного сигнала растет и в пределе при входном сигнале, стремящемся к нулю, принимает некоторое конечное (в идеальном случае - бесконечное) значение КрэмаксТаким образом, при выходных сигналах сумг ирующего усилителя 4, отличных от нуля, постоянная времени фильтра Тф-90 (Кц И О/ а Крз достат очно велико) и выходной сигнал интегратора (Jy, практически безынерциально отслеживает изменение сигна ла датчика скорости двигателя. Релейный элемент 6 переключается с большой частотой, функционируя в . скользящем режиме. В этом случае среднее значение сигнала на входе интегратора будет пропорционально производной скорости, а следовательно динамической составляющей ig, тока якоря. Сигнал на выходе первого суммирующего усилителя будет пропорционален статическому току якоря, т.е. ic i - i(v. Уменьшение выходного сигнала суммирующего усилителя 4 до нуля сопровождается резким ростом постоянной времени Тф и при К п O((JQC UH) , что эквивалентно разифшанию прямого канала контур вычисления динамической составляющей тока якорй, а следовательно, помехи, возникающие в контуре измерения скорости двигателя, практически полностью отфильтровываются и не попадают на вход релейного элемента. При этом установившиеся режшуи работы электропривода D(jc - const характеризуются тем, что вследствие н чтожно малого отклонения сигнала Он от нуля (Кцп о) сигнал на выходе релейного элемента б практически остается неизменным и равным нулю. Следовательно, введение в систему нелинейного функционального преобразователя, с отмеченными свойствами, релейного элемента и интегратора позволяет в малодинамичных (ускорение привода в реальных системах ограничено, и соответствующим выбором постоянной -времени Т интегратора можно добиться существования непреЕЫВНОГО скользящего режима) и уста-новившихся режимах значительно уменьшить амплитуду колебаний выходного сигнала релейного элемента, что повышает точность вычисления динамической и статической составляющих тока якоря при одновременном снижении уровня поля в измеряемом сигнале.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| Электропривод постоянного тока | 1981 |
|
SU1050075A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001405A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
УСТРОПСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ТОКА ЯКОРЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА, содержащее датчик полного тока якоря. датчик скорости вращения двигателя, устройство для вычислениядинамической составляющей тока якоря и первый суммирующий усилитель, к входам которого подключены выходы датчика полного тока якоря и устройства для вычисления динамической составляющей тока якоря, отличающееся тем, что, с цглью повышения тончности измерения и снижения уровня помех в измеряемом сигнгше, устройство для вычисления динамической составляющей тока якоря выполнено в виде последовательно включенных второго суммирующего усилителя, нелинейного функционального преобразователя , релейного элемента и интегратора,причем выходы датчика скорости вращения двигателя и интегратора подключены к входам второго суммирующего усилителя, а выход релейного элемента подключен к входу первого суммирующего усилителя.