Изобретение относится к судостроению, -в частности к системам погрузки-выгрузки судов.
Целью изобретения является повышение надежности.
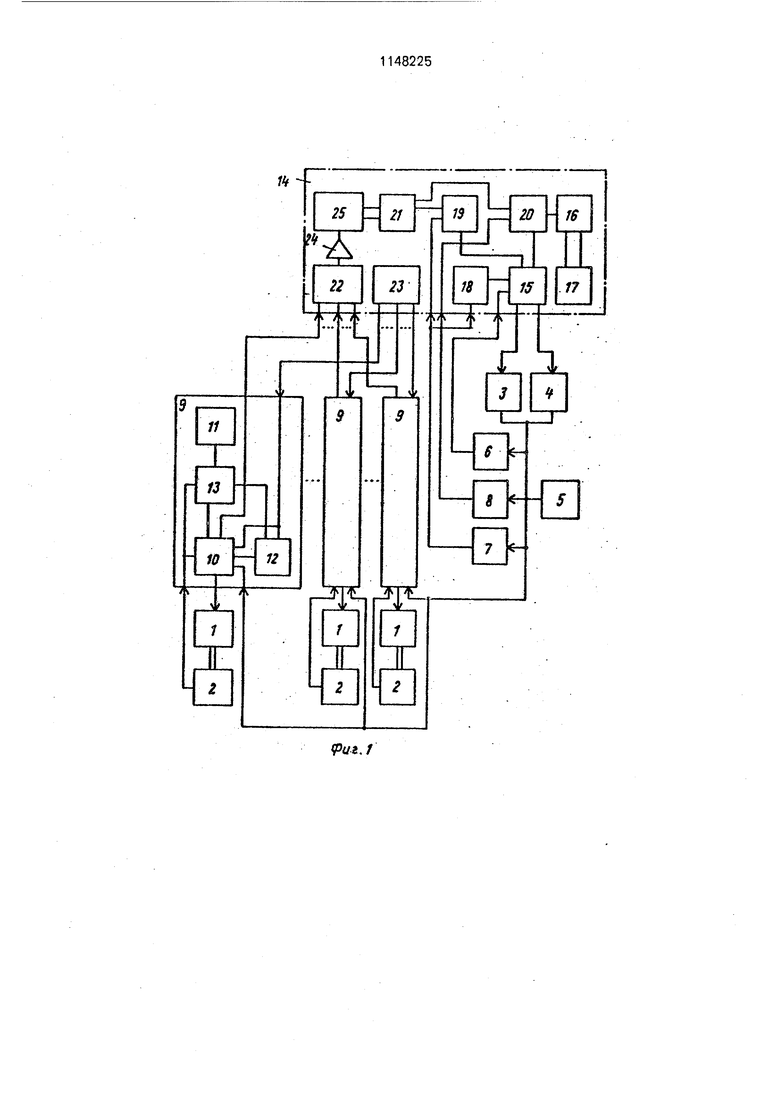
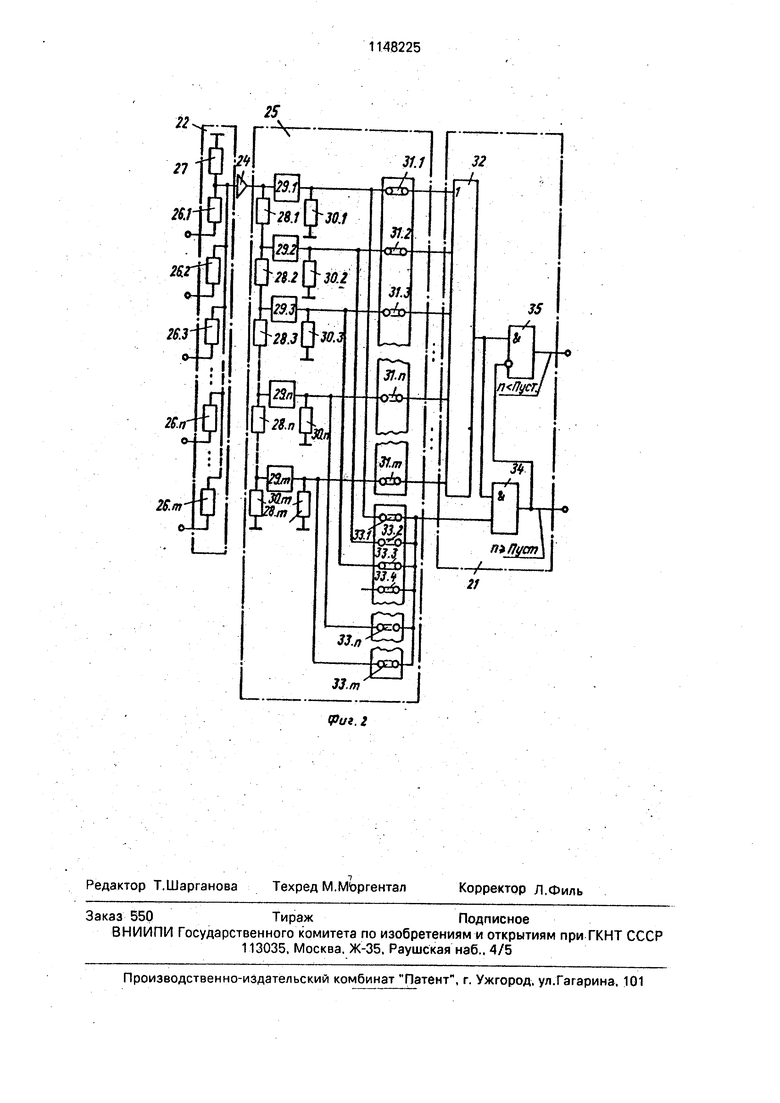
На фиг. 1 изображена функциональная схема предлагаемой системы; на фиг. 2 принципиальная схема части системы.
Система содержит дистанционно управляемые затворы 1, установленные на трубопроводе и оборудованные сигнализаторами 2 конечного положения. Рабочей средой для исполнительных механизмов затворов служат веретенное масло или специальная жидкость, нагнетаемая насосами 3 и 4 с электроприводами. Система также содержит гидроаккумулятор 5, сигнализаторы верхнего 6 и нижнего 7 рабочего и нижнего 8 предельного давлений.
Количество устройств 9 контроля и управления затворами 1 соответствует количеству затворов. Каждое устройство 9
включает блок 10 управления затвором, блок 11 сигнализации, блок 12 выявления неисправностей и блок 13 коммутации. Устройство 14 контроля и управления насосами включает блок 15 управления насосами, блок 16 тревожной сигнализации, органь.117
отключения тревожной сигнализации, блок
О) 18 управления расходом ресурса насосов,
Ю Ю блок 19 выявления тяжелого режима работы,.блок 20 выявления аварийного режима
работы, блок 21 сравнения, сумматор 22 и орган 23 управления контролем, подключенный к блокам 10 и 13. Второй выход блока 10 через блок 13. к второму и третьему
Ю входам которого подключены соответственно второй выход блока 12 и сигнализаторы 2, подключенные также к бл.оку 10, связан с блоком 11, Блоки 10 подключены к входам сумматора 22, выход которого через усилитель 24 и блок 25 формирования сигнала установки подключен к входу блока 21 сравнения, первый вход через блок 19 выявления тяжелого режима работы, а второй выход через блок 20 подключен к блоку 15, вторые входы блоков 19 и 20 - соответственно к сигнализаторам нижнего 7 рабочего и 8 предельного давлений, второй выход блока 20 подключен к блоку 16, второй и третий входы которого подключены к органам 17,
Блок 1.0 может быть реализован, например, с использованием выключателей Открыто и.Закрыто, элементов памяти со стиранием, в качестве которых могут быть использованы RS-триггеры и электрогидравлические манипуляторы.
Блок 13 реализован на логических элементах И, ИЛИ, ЗАПРЕТ..
Сумматор 22 включает в себя группу резисторов 2б.1-2б.п-26.т, концы которых объединены и подключены к другому резистору 27, к которому подключен усилитель 24.
Блок 25 содержит последовательную цепь резисторов первой группь 28.1-28.п28.т, к каждому из которых через пороговые элементы 29.1-29.n-29.m подключены резисторы 30.1-30.n-30.m второй группы. Пороговый элемент может быть реализован, например, с использованием нелинейного элемента, усилителя и цепи положительной обратной связи либо в более простом варианте с использованием стабилитронов,
Блок 25 включает также коммутационные элементы 31.1-31.n-31.т. Через указанные элементы выходы элементов 29.1-29.т подключены к входам многовходового элемента 32 ИЛИ, а через другие коммутационные элементы 33.1-33.т, выходные клеммы которых объединены, подключены к входу элемента 34 И, входящего 3 состав блока 21.
Количество коммутационных элементов выбирается равным числу уставки без единицы, а установлены они, начиная с первого разряда, без пропусков.
Во второй группе коммутационных элементов 33.1-33.m устанавливают один коммутационный элемент в разряде по порядку, равном числу уставки, начиная с первого разряда.
Так, например, для числа уставки в первой группе должны быть установлены два коммутационных элемента в первом и втором разрядах, а во второй группе - один элемент в третьем разряде.
К другому входу элемента 34, а также к входу элемента ЗАПРЕТ подключен выход элемента 32.
Выход элемента 34 подключен к выходной клемме устройства, с которого снимается сигнал 1 в случае п Пуст, а также на запрещающий выход элемента 35, выход которого подключен к выходной клемме, с которой снимается сигнал 1 в случае п Пуст. Сопротивления резисторов первой группы блока 25 выбраны равными между собой, в связи с чем для обеспечения прямой пропорциональности между аналоговыми сигналами на выходе усилителя 24
Uebix.ycT. О...ивых max ус-O...UBX max. где UBX напряжение на входной клемме блока 25, и единичным кодом, снимаемым с выхода пороговых элементов, величина их порога Unop должна ,быть вь1брана по формуле Unop -1,2. . . n...m.
Так, например, при UBX В и пороговые элементы должны быть подобраны с порогом, образующим следующий ряд: 10,18,24,28,30.30.28,24,18,10.
При работе сумматора на входе блока, реализуемого на делителях напряжения (резисторы), возникает ошибка Д К по коэффициенту к передачи входного делителя. . Идеальный коэффициент передачи
m
Фактический коэффициент передачи к - 2 .
гчфакт-
R.+E
,2,...n...m.
где RI - величина резистора первой группы (26.1-26.т):
На - величина другого резистора 27.
Зависимость Кфакт от п нелинейна. Ошибкой входного делителя по коэффициенту передачи напряжения можно считать разность между его идеальным и фактическим значениями
Ra
Д К-Кия - Кфакт
R,.il
m
Для компенсации этой ошибки ее величина должна быть учтена при подборе величин порогов пороговых элементов с помощью формулы
I /
-n.-(n-l) +
rr V|
/вх пор
m
R2
Система работает следующим образом.
Первоначально включается питание устройств управления затворами 1 и насосами. Далее с помощью органа 23 управления контролем контролируется исправность лиНИИ управления от блоков 10 до электрогидравлических манипуляторов, т.е. на значительном расстоянии от поста управления. Одновременно контролируется исправность обмоток электромагнитов управления манипуляторов. При наличии неисправности, которая индицируется на блоке 11, необходимо их исправить и повторить операцию контроля.
Убедившись в исправности линии управления и обмоток манипулятора, приступают собственно к осуществлению грузовых операций, а именно к коммутации затворов 1 при условии, если давление в гидросистеме имеется (хотя бы за счет гидроаккумулятора 5), насосы 3 и 4 будут запущены в случае необходимости автоматически. Возможно также ручное включение насосов от кнопки, например, при неисправности сигнализаторов давления.
Контроль и управление затворами осуществляется устройством 9,
Для перевода затвора в положение Открыто или Закрыто необходимо подать сигнал на соответствующие входы электротидравлического манипулятора, который подключает гидропитание к нужной полости исполнительного механизма затвора 1. Управляющие команды запоминаются и далее поступают на входы манипулятора. Стирание памяти осуществляется при отмене команды после окончания открытия (закрытия) затвора по сигналу от сигнализаторов 2 его конечного положения, который индицируется на лампах блока 11. Эти же лампы используются для индикации неисправности в режиме контроля линий связи и манипулятора. В этом режиме штатные каналы от сигнализаторов 2 отключаются от ламп блока 11. с помощью блока коммутации, а каналы от блока 12, наоборот, подключаются к лампам блока 1 1.
В режиме контроля на обмотку манипулятора подается вместо постоянного рабочего выпрямленное напряжение. В случае исправности формируется ЭДС самоиндукции, образующая второй полупериод напряжения. В этом случае суммарный сигнал достаточен для срабатывания и удержания и соответствующий сигнал Исправно подается на лампы блока 11 сигнализации. В случае обрыва линии управления или обмотки манипулятора или короткого замыкания ее витков второй полупериод напряжения исчезает и в блок 13 коммутации поступает сигнал неисправно, который будет индицироваться на лампах блока 11.
Контроль и управление насосами осуществляется устройством 14. Возможны три режима работы: нормальный, тяжелый и
аварийный. Нормальный режим характеризуется исправным состоянием трубопроводов гидросистемы и расходом рабочего тела при количестве одновременно открывающихся и закрывающихся затворов 1, определяемом конкретной системой каждого типа судна. В этом случае при использовании энергии гидроаккумулятора и падении давления в гидросистеме ниже уставки сиг0 нализатора 7 сигнал от него поступает на блок 15 -управления гидронасосами и при наличии сигналов на первом и втором выходах блока 18 запускает гидронасос 3 или 4. Блок 18 формирует сигналы на одном из
5 своих выходов поочередно, при этом каждый последующий сигнал пуска будет проходить на другой насос. Так достигается поочередность срабатывания насосов и выравнивание расхода их ресурсов работы.
0Останов работающего насоса в нормальном режиме осуществляется при достижении давлением в гидросистеме значения, соответствующего уставке сигнализатора 6. сигнал от которого поступает на входы
5 магнитных пускателей насосов, причем соответствующий пускатель размыкает контакты силовой линии электропривода работавшего насоса 3 и 4.
Тяжелый режим работы характеризуется повышенным расходом рабочего тела в системе гидравлики, вызванным необходимостью одновременной коммутации большего количества затворов, чем рекомендуется, что может быть связано с требованием интенсифицировать процесс погрузки в порту.
В этом случае давление в гидросистеме может достичь предельного значения (нижнего). Тогда блоком 19 будет сформирован сигнал на запуск двух насосов одновременно, который и будет реализован с помощью блока 15. Сигнал блока 21 формируется на основе подсчета количества одновременнооткрывающихсяи
5 закрывающихся затворов, осуществляемого усилителем 24 и блоком 25 и сумматором 22, к которому подключены элементы памяти блока 15, сигнал на которых имеется только во время перекладки затворов.
0 Количество одновременно работающих сравнивается с его уставочным значением Пуст, сформированным блоком 25 на блоке 21 сравнения. На прямом выходе этого блока формируется сигнал, соответствующий
5 Пуст, служащий для формирования сигнала о тяжелом режиме работы блоком 19.
При срабатывании одновременно нескольких затворов трубопроводной систе мы судна о том, что они находятся в
состоянии переключения сигналы поступают на входные клеммы устройства. На сумматоре происходит сложение сигналов, суммарный сигнал подается на вход усилителя 24, выходной аналоговый сигнал котоус
poro изменяется в диапазоиэ О-Увых /
мае
O...UBX мах. Этот сигнал равномерно падает на равных по величине рез гСторах первой группы.
Рассмотрим, например, с.лучай, когда
, ивых.- Uex гпг1х lO при В. мах
8
Это напряжение разложится на сопротивлениях первой группы следующим образом:
R1.1 1.2 1.3 1.4 1.5 1.6
1.7 4 и 10 9 8765
а при UBX 100В: R 3.1 3.2 3.3 3.4 3.5 3.6
3.7 и 100 90 80 70 60 50 40
10Полную картину раскладок напряжения на резисторах первой группы при изменениях входного напряжения от нуля до максимума можно представить следующей таблицей (матричной):
| название | год | авторы | номер документа |
|---|---|---|---|
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
| МНОГОКАНАЛЬНОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1329432A1 |
| Устройство для управления питанием обмотки электромагнита | 1980 |
|
SU966757A1 |
| Устройство для пожарной сигнализации | 1980 |
|
SU987652A1 |
| Устройство для приема телесигналов | 1983 |
|
SU1137497A1 |
| Многоканальное резервированное аналоговое устройство | 1981 |
|
SU1051751A1 |
| СИСТЕМА УПРАВЛЕНИЯ СОРТИРОВКОЙ НАРЕЗАННОГО КАРТОФЕЛЯ | 1990 |
|
RU2016670C1 |
| Устройство для защитного отключения в сети переменного тока | 1987 |
|
SU1484240A1 |
| Устройство для контроля световой сигнализации транспортного средства | 1989 |
|
SU1733289A1 |
| Аналого-цифровой интегратор | 1979 |
|
SU813456A2 |
СИСТЕМА ПОГРУЗКИ-ВЫГРУЗКИ ЖИДКИХ ГРУЗОВ НА СУДНЕ по авт. св. № 1064583, отличающаяся тем, что, с целью повышения надежности, она снабжена включенным между выходом сумматора и входами блока сравнения блоком формирования сигнала уставки, содержащим на своем входе одну группу последовательно соединенных резисторов равной величины, пороговые элементы и другую группу рези-, сторов, каждый из которых подключен одним из выводов через пороговый элемент к одному из резисторов первой группы, а другим - к общей шине, и две группы коммутационных элементов, вход которых соединен с выходами соответствующих пороговых элементов, выходы одной из групп объединены и являются одним выходом блока, другими выходами которого являются выходы коммутационных элементов другой группы.
Д лагсналь указанной матрицы, идущ ля C-iesS: гэсрху h p-;-7i;: , соответствует :.начен 1ям НсГф::,: ;еиий, при которых срабатывают пороговь е ,. Итак, на входах сумматора мы i.iK4c;esv: сигналы, выраженные в единичном неупо|зядоченном коде. На выходе порогсвьч ,-ентоз пелV4.se;vi ТО же единичный кои. ;о упорядоченный, т.е. появление ьйждой новой единицы на любом входе приводит к появлению единицы на выходе «г:-Г,ко в следующем по номеру разряде по отно1Уению ьабсру пзрзь х разрядой, .г.уоршй имелся r.i, выходе пороговых злемеитоз ранее.
Далее с выходов пороговых злементов упорядоченный код поступает на группы коммутационных элементов 31.1-31.n-31.m и 33.1-ЗЗ.п-ЗЗ.т и происходит наладка на соответствующую уставку. Уставка определяется, исходя из количества одновременно переключаемых затворов системы погрузки, которое может обеспечить по расходу рабочей жидкости станция гидравлики данного судна.
Останов насосов в спучзе окончания тяжелого режима работы осущес является блоком 15 по сигналу от сигнализатора 6.
Аварийнь й режим работы характеризузтсй noRt-je. расходом рабочего тела в -;;дросистеме несмогря на то, что количество одновременно открывающихся и закрывающихся затворов не превосходит рекомендуемого значения Пуст. Этоуказывае на iG, что 1.гл;еются утечки рабочего тела из-за Нс1/ сг-:ревности или даже разрушения трубопроводое системы гидравлики. Сигнал о нзлич А : ssapi Sb-on ситуации в системе
:/ ДрйЬЛИК: фсрь Йр гСЯ блоком 20 мЭ ОСНОеании сигнэл;- - iSepCHoro выхода блока 2 г срс ьнеь-;|.чл . .: и- ализаторов 8, а также сигналов СП б.О.-с-контактов магнитных пускателей насосов. При совпадении указанных четырех сигналов возникает сигнал аварийного режима работы, подающийся.на блок 16 тревожной сигнализации и на входы Стоп магнитных пускателей.
Блок 16 запоминает входной сигнал и осуществляет звуковую и световую сигнализацию. После привлечения внимания оператора звуковая сигнализация отключается органом 17, а пос.ое устранения неисправности отключ.зют и световой мигающий сигнал.
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
