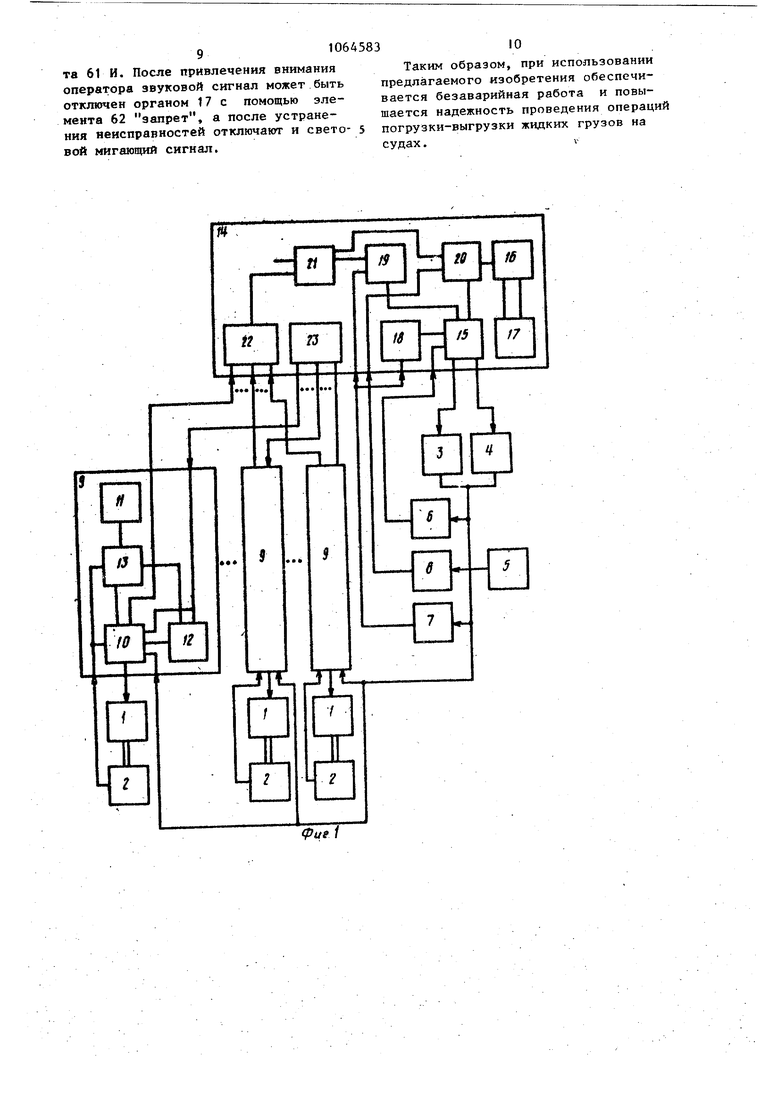
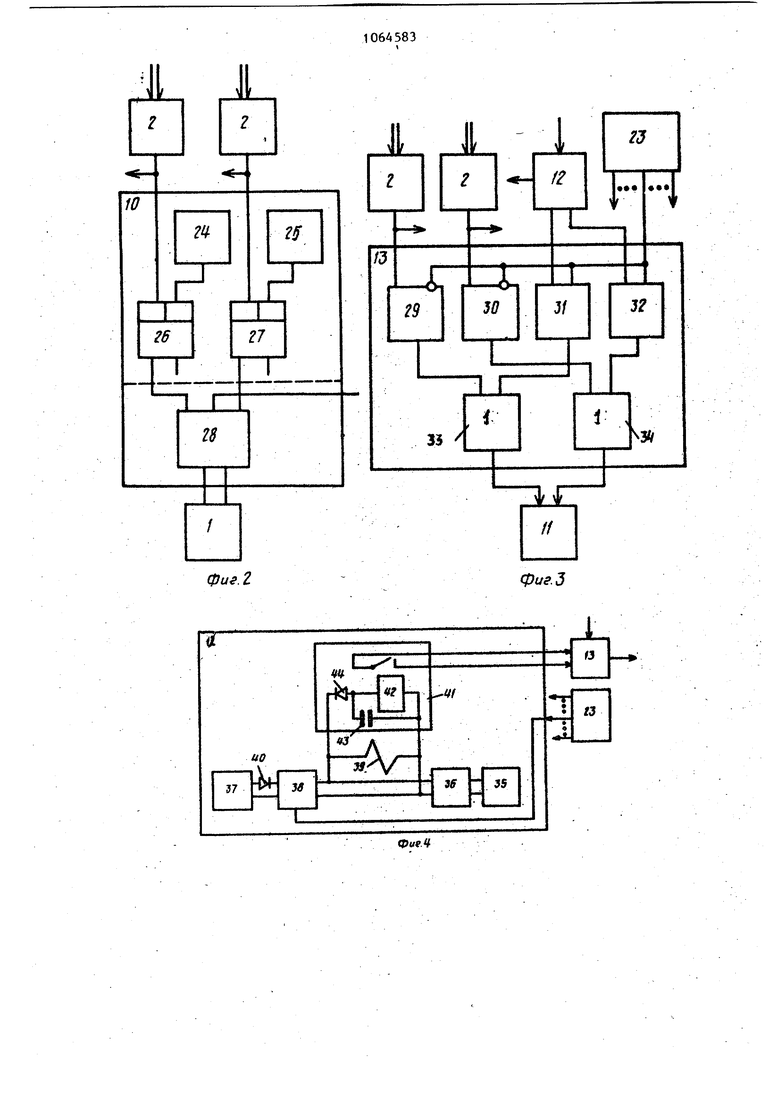
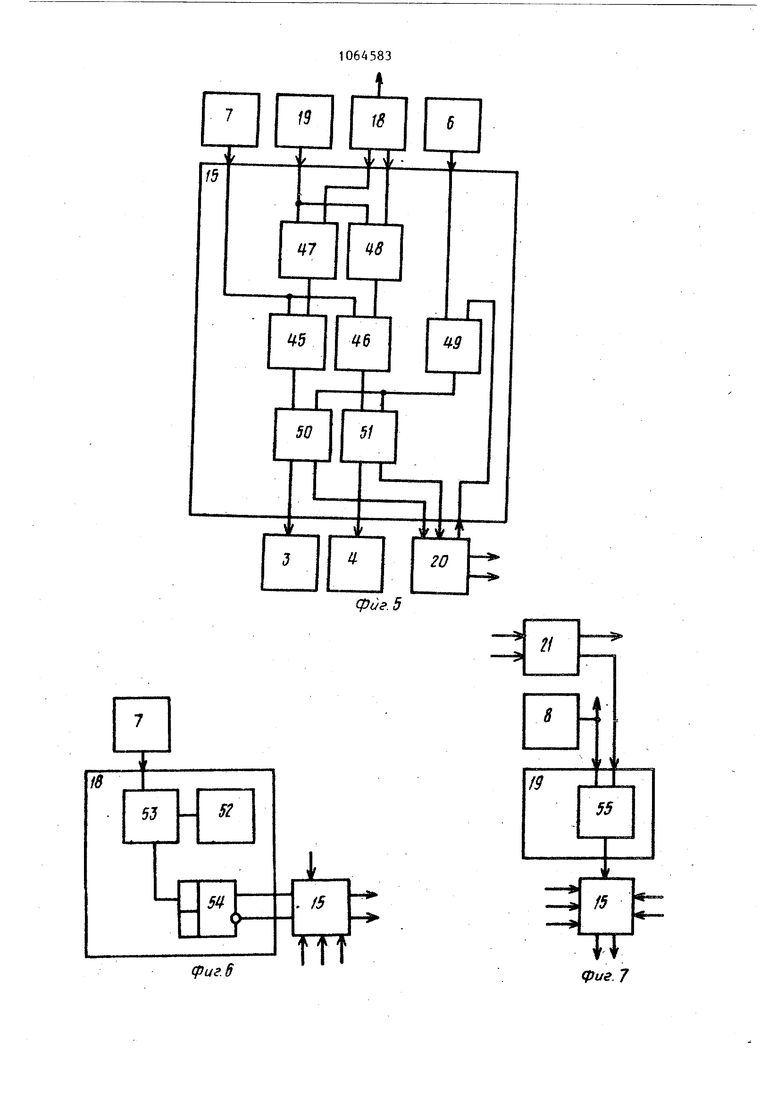
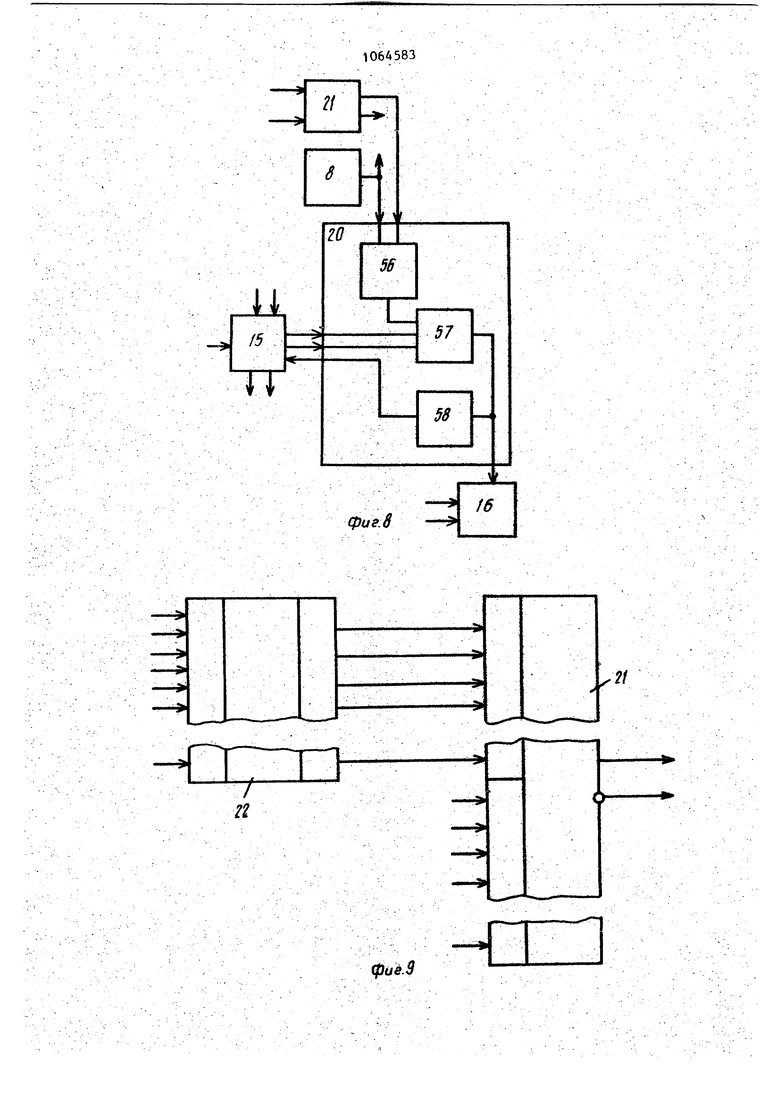
Изобретение относится к судостроению, в частности к системам по грузки-выгрузки жидких грузов на судне. Известна система погрузки-выгруз ки жидких грузов на судне, содержащая блоки управления насосами и затворами, связанные с соответствующими исполнительными механизмами, сигнализаторы конечных положений .затворов, сигнализаторы верхнего и нижнего рабочего и нижнего предел ного давлений, блоки коммутации, блоки выявления неисправностей, бло ки сигнализации и блок тревожной си нализации, причем каждый блок управ ления затвором связан с соответству щим блоком выявления неисправностей и через соответствующий блок коммутации - с блоком сигнализации, а сигнализаторы конечных положений затворов связаны с соответствующими блоками управления затворами и коммутации 1J. Недостатком известной системы является недостаточная надежность ее работы. Цель изобретения - повышение надежности ее работы. Для достижения цели система погрузки-выгрузки жидких грузов на суд не, содержащая блоки управления насосами и затворами, связанные с соот ветствующими исполнительными механизмами, сигнализаторы конечных поло жений затворов, сигнализаторы верхне го и нижнего рабочего и нижнего предельного давлений, блоки коммутации, блоки выявления неисправностей блоки сигнализации и блок тревожной сигнализации, причем каждый блок управления затвором связан с соответствующим блоком выявления неисправно тей и через соответствующий блок ком мутации - с блоком сигнализации, а сигнализаторы конечных положений затворов связаны с соответствующими блоками управления затворами и ком: мутации снабжена блоком управления расходом ресурса насосов, блоками выявления тяжелого и аварийного режи мов работы, блоком сравн-ения и сумма тором, при этом выходы блоков управления затворами связаны с входами сумматора, выход которого соединен с блоком сравнения, сигнализатор / верхнего рабочего давления подключ и к блоку управления насосами, сиг нализатор нижнего рабочего давления подключен к блоку управления расходом ресурса насосов и к блоку выявления тяжелого режима работы, , КУ выявления тяжелого режима работы, к другому входу которого подключен блок сравнения, а к выходу - блок управления насосами, соединенный своими входами с блоком управления расходом ресурса насосов и с блоком выявления аварийного режима работы, к входам которого подключены сигнализатор нижнего предельного давления и блок сравнения, а к выходу - блок тревожной сигнализации, кроме того, блок управления расходом ресурса насосов включает соединенные последовательно элемент ИЛИ и триггер, выходы которо.го являются выходами указанного блока, входом которого является вход элемента ИЛИ, блок выявления тяжелого режима работы включает элемент И, а блок выявления аварийного режима работы включает последовательно соединенные первьш и второй элементы И и элемент задержка времени, при этом к входам первого элемента И подключены сигнализатор нижнего предельного давления и блок сравнения, к входу второго элемента И - блок управления насосами, связанный с выходом элемента задержка времени, а выход второго элемента И соединен с блоком тревожной сигнализации. На фиг.1 изображена функциональная схема сиртемы погрузки жидких грузов на-судне,, на фиг.2 - принципиальная схема блока управления затвором; на фиг.3 - принципиальная схема блока коммутации; на фиг.4 - принципиальная схема блока выявления неисправностей; на фиг.5 - принципиальная схема блока управления насосами; на фиг.6 - принципиальная схема блока управления расходом насосов; на фиг.7 .принципиальная схема блока выявления тяжелого режима работы; на фиг-.8 принципиальная схема блока выявления аварийного режима работы; на фиг.9 - принципиальная схема блоков сравнения и суммирования; на фиг.10 - принципиальная схема блока тревожной сигнализации. Система содержит дистанционно-управляемые затворы 1, которые установлены на трубопроводах, соединяющих грузовые емкости и насосы. Затворы оборудованы сигнализаторами 2 конечного положения. Рабочей средой для исполнительных механизмов затворов 1 служит веретенное масло или специальная жидкость, которая нагне тается насосами 3 и 4 с электроприводами. Кроме того, в составе стацци гидравлики имеется гидроаккумулятор сигнализаторы верхнего 6 и нижнего 7 рабочего и нижнего 8 предельного давлений. Количество устройств 9 контроля и управления затворами соответствует количеству затворов. Каждое устройст во 9 включает в себя блок 10 управления затвором, блок 11 сигнализации, блок 12 выявления неисправностей и блок 13 коммутации. Устройство 14 контроля и управления насосами включает в себя блок 15 управле ния насосами, блок 16 тревожной сигнализации, органы 17 отключения тре ножной сигнализации, блок 1.8 управле ния расходом ресурса насосов, блок 1 выявления тяжелого режима работы, блок 20 выявления аварийного режима работы, блок 21 сравнения, сумматор 22 и орган 23 управления контролем,который подключен к блоку 10 управления затв ром и блоку 12 выявления неисправнос тей, связанным между собой, второй выход блока 10 управления затвором через блок 13 коммутации, к второму и третьему входам которого подключены соответственно второй выход блока 12 выявления неисправностей и си нализаторы 2 конечного положения, подключенные также к блоку 10 управления затвором, связан с блоком 11 сигнализации, блоки 10 управления затворами подключены к входам суммат ра 22, выход которого подключен к ВХОДУ блока 21 сравнения, к второму входу которого подключен сигнал уставки допустимого количества одновременн работающих затворов 1, первый выход через блок 19 выявления тяжелого режима работы, а второй выход - через блок 20 выявления аварийного режима - подключены к блоку 15 управления насосами, вторые.входы бло- . ков 19 выявления тяжелого и 20 аварийного режимов подключены соответственно к сигнализаторам нижнего рабочего 7 и нижнего предельного 8 давлений, второй выход блока 20 выявления аварийного режима подключен к блоку 16 тревожной сигнализации, второй и третий вход которого подКДючены к органам 17 отключения треножной сигнализации, сигнализатор 6 верхнего рабочего давления подключен к блоку 15 управления насосами, сигнализатор 7 нижнего рабочего давления подключен также к второму входу блока 18 управления расходов ресурса насосов, а сигнализатор 6 верхнего рабочего давления подключен к блоку 15 управления насосом. Блок 10 управления затвором может быть реализован, например, с использованием выключателей открыто 24 и закрыто 25, элементов 26,27 памяти с стиранием, в качестве которых могут использоваться RS-триггеры и электрогидравлические манипуляторы, 28. Блок 13 коммутации может быть pea лизонан, например, с использованием элементов запрет 29 и 30, И 31 и 32, ИЛИ 33 и 34. Блок 12 выявления неисправности может быть реализован с помощью устройства, содержащего источник 35 рабочего напряжения постоянного тока, блок 36 коммутации рабочего сигнала (выполненный, например, на релейноконтактньрс элементах), источник 37 контрольного напряжения переменного тока, блок 38 подключения контрольного сигнала (выполненный например, на релейно-контактнык элементах), электромагнитную нагрузку 39 (обмотка управления электрогидравлического манипулятора 28), диод 40, узел 41 контроля, включающий, в свою очередь, реле 42 контроля (с контактной группой), конденсатор 43, диод 44. Блок 15 управления насосами может быть реализован, например, с использованием логических элементов И 45 и 46, ИЛИ 48, 48 и 49 и магнитных пускателей 50 и 51. Блок 18 управления расходом ресурса насосов может быть реализован, например, с использованием выключателя 52 с самовозвратом (кнопки), элемента 53 ИЛИ и RS-триггера 54. Блок 19 выявления тяжелого режима работы может быть реализован, например, с использованием элемента. 55 И. Блок 20 выявления аварийного режима работы может быть реализован, например, с использованием элементов И 56 и 57 и элемента 58 задержка времени. Блок 16 тревожной сигнализации может быть реализован с использованием генератора 59, например, мультивибратора, RS-триггера 60, элемента 61 И, элемента 62 запрет, сиг нальной лампь 63 и звонка 64. Отключение светового мигающего и звукового сигналов производится органами 17. Система работает следующим -образом. Ввод системы в действие. Первоначально включается электропитание устройств 9 и 14 управления затворами и насосами.Далее с помощью органа 23 управления контролем контро лируется исправность линии управления на длине от блоков 10 управления затворами, расположенными, например,, в посту управления грузовыми операциями в щитах управления , до электро-: гидравлических манипуляторов 28,-рас положенных, например, в районе размещения затворов или в выгородке м шинного отделения, т.е. на значитель ном расстоянии от поста управления. Одновременно контролируются неисп равности обмоток электромагнитов электрогидравлических манипуляторов 2 При наличии неисправно.стей, которые индицируются на блоке 11 сигнализаци необходимо их исправить и повторить операцию КОНТРОЛЯ. Убедившись в исправности линий уп равления и обмоток электрогидроманипуляторов 28, можно приступить к осу ществлению соответственно грузовых бпераций, а именно, к коммутации затворов 1, при условии, если давление в ; гидросистеме имеется (хотя бы за счё гидроаккумулятора 5). Насосы 3,4 будут запущены в случае необходимост автоматически, возможно ручное включение насосов от кнопки 52, например при неисправности сигнализатора нижнего рабочего давления. Рабочий режим системы. Контроль и управление затворами осуществля&уся устройством 9. Для пере открыто вода затвора в положение закрыто необходимо подать сигнал или на соответствующие входы электро- . гидравлического манипулятора 28, который подключит гидропитание к нужной полости исполнительного механизма (гидропривода) затвора 1. Управляющие команды от выключаэлементах 26 или 27 памяти и далее поступают на входы манипулятора 28, Стирание памяти осуществляется при отмене команды после окончания открытия (закрытия) затвора по сигналу от сигнализаторов 2 его конечного положения, который индицируется на лампах блока 11 сигнализации. Эти же лампы используются для индикации неисправности в режиме контроля линий связи и манипулятора 28. В этом режиме штатные каналы от сигнализаторов 2 конечного положения отключаются от ламп блока 11 сигнализации с помощью элементов 29 и 30 запрет блока коммутации, а каналы от блока 12 выявления неисправностей, наоборот, подключаются к лампам блока 11 сигнализации через элементы 31, 32 И и далее через элементы 33 и 34 ИЛИ. В режиме контроля на обмотку 39 электрогидроманипулятора 28 вместо постоянного рабочего напряжения от источника 35 подается выпрямленное диодом 40 напряжение от источника 37. Перекоммутация источников осуществляется блоками 36 и 38. В случае исправности обмотки 39 управления и линий связи рабочего сигнала от устройства 9 управления гидрозатвором до электроманипулятора 28 на ней формируется ЭДС самоиндукции, которая с помощью конденсатора 43 и диода 44 узла 41 контроля образует второй полупериод напряжения. В этом случае суммарный сигнал. обтекающий обмотку реле 42, достаточен для,срабатывания и удержания, и соответствующий сигнал исправно передается с контактной группы реле 42 на блок 13 коммутации идалее на лампы блока 11 сигнализации. В случае обрыва линии управления 1Рши обмотки 39 управления или короткого замыкания ее витков второй полупериод напряжения на обмотке реле 42 исчезает и с его контактной группы в блок 13 коммутации поступит сигнал HekqnpaBHb, которьй, будет индицироваться на лампах блока 11 сигнализации (отсутствие го- . рения ламп). Контроль и управление насосами осуществляется устройством 14. Возможны fpи режима работы: нормальный, тяжелый и аварийньй. Нормальньй режим работы характеризуется исправным (без утечек) состоянием трубопроводов гидросистемы и расходом рабочего тела при коли7106честве одновременно открывающихся и .закрывающихся затворов 1, определяемом конкретной системой каждого типа судна. В этом случае, при использовании энергии гидроаккумулят;ора и падении давления в гидросистеме ниже уставки сигнализатора 7 нижнего рабочего дав ления, сигнал от него поступит на эл менты И 45 и 46 блока 15 управления гидронасосами и, при наличии сигнало на первом и втором выходах блока 18 управления расходованием ресурса, пр шедшего через элементы 47 или 48 ИЛИ запустит с помощью магнитных пускателей 50 или 51 гидронасос 3 или 4. Упомянутый блок 18 управления рас ходованием ресурса формирует сигналы на одном из своих выходов при наличии проходящих через элемент 53 ИЛИ сигналов от сигнализаторов 7 ниж него рабочего давления или от выключателЯ 52 поочередно за счет триггера 54, при этом каждый последующий сигнал пуска будет проходить на другой (не работавший при предьщущем пуске) насос. Так достигается поочередность срабатывания насосов и выравнивание расхода их ресурса работы Останов работающего (одного из двух) насосов 3,4 в нормальном режиме осуществляется при достижении давлением в гидросистеме значения, соответствующего уставке сигнализатора 6 верхнего рабочего давления, сигнал от которого через элемент ИЛИ 49 поступит на входы Стоп магнитных пускателей 50 и- 51, причем соответствующий пускатель разомкнет контакты силовой сети электропривода работавшего насоса 3 либо 4. Тяжелый режим работы характеризуется повышенным расходом рабочего тела, в системе гидоавлики. вызванный необхо/у1мостью одновременной коммутации большего количества затворов, 4e рекомендуемое, что может быть связаjHo, например ,с требованием интенси;фицировать процессы погрузки по данн му порту (причалу), нефтебазе, судну В этом случае давление в гидросистем может достичь нижнего предельного зна чения. В этом случае блоком 19 выполнения тяжелого режима работы, содержащим элемент И 55, по сигналам от блока 21 сравнения и сигнализатора 7 нижнего предельного давления, .будет сформирован сигнал на запуск двух насосов одновременно, который и будет реализован с помощью блока 15 управления насосами. Сигнал блока 21 сравнения формируется на основе подсчета количества одновременно открывающихся и закрывающихся затворов, осуществляемого сумматором 22, к которому подключены элементы 26, 27 памяти блоков 10 управления затворов 1, сигнал на которых имеется только во время перекладки затворов. Количество одновременно работающих затворов сравнивается с его уставочным значением блоке 21 сравнения. На прямом выходе этого блока формируется сигнал, соответствующий п п ,с-г , служащий для формирования сигнала о тяжелом режиме работы блоком 19. Останов насосов в случае окончания тяжелого режима работы осуществляется, как и в случае нормального режима работы, блоком 15 управления, по сигналу от сигнализатора 6 верхнего рабочего давления. Аварийный режим работы характеризуется повышенным расходом рабочего тела в Гидросистеме, несмотря на то, что количество одновременно открываемых и закрываемых затворов не превосходит рекомендуемого значения h-ycT Это указывает на то, что имеются утечки рабочего тела из-за неисправности или даже разрушения трубопроводов систем гидравлики. Сигнал о наличии аварийной ситуации в системе гидравлики формируется блоком 20 выявления аварийного режима работы на основании сигналов ,с инверсного выхода блока 21 сравнения и от сигнализатора 8 нижнего предельного давления, а также сигналов от блок-контактов магнитных пускателей 50,51. При совпадении указанных четырех сигналов на элементах 56,57 И возникает сигнал аварийного режима работы, который подается на блок 16 тревожной сигнализации и после элемента 58 задержки времени на входы стоп магнитных пускателей блока 15 управления насосами. Блок 16 тревожной сигнализации запоминает входной сигнал на RS-триггере 60 и осуществляет звуковую с помощью звонка 64 и на лампе 63 световую мигающую сигнализации от генератора 59 мигающего сигнала. Запомиенньй входной сигнал разрешает прохождение мигающего сигнала на лампу 63 сигнализации с помощью элемен9106458310
та 61 И. После привлечения внимания Таким образом, при использовании оператора звуковой сигнал может.быть предлагаемого изобретения обеспечиотключен органом 17с помощью эле- веется безаварийная работа и повымента 62 запрет, а после устране- шается надежность проведения операций ния неисправностей отключают и свете- 5 погрузки-выгрузки жидких грузов на
вой мигающий сигнал.
судах,
i J
| название | год | авторы | номер документа |
|---|---|---|---|
| Система погрузки-выгрузки жидких грузов на судне | 1983 |
|
SU1148225A2 |
| Устройство для предупреждения пожара | 1981 |
|
SU995819A1 |
| Устройство для управления про-цЕССОМ ОСушЕНия СТОчНыХ КОлОдцЕВНА СудНЕ | 1979 |
|
SU796058A2 |
| Устройство для автоматического управления системой инертных газов в нефтеналивных судах | 1973 |
|
SU475157A1 |
| Устройство для управления и защиты циркуляционной электродиализной установки | 1981 |
|
SU999021A1 |
| Устройство для управления процессом осушения сточных колодцев на судне | 1972 |
|
SU551452A1 |
| Устройство для аварийной сигнализации при многоточечном контроле объекта | 1980 |
|
SU902038A1 |
| Устройство для сигнализации о нарушении технологического процесса | 1976 |
|
SU643932A1 |
| Устройство для контроля работы насоса | 1982 |
|
SU1072079A1 |
| Устройство для многоточечной техно-лОгичЕСКОй СигНАлизАции | 1979 |
|
SU824247A1 |

фи.2
«3
fii
M
37
фиг.З
w
гз
3ff
35
1064583
w
- 5
55
. 15
ТТТ
(риг. 6
(раг.5
1
/9
ss
/s
TT
фие. 7
ii
/5 :
57
/6
фиг 8
n
фйё.д
сриг. fO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления грузовыми операциями на танкере | 1974 |
|
SU596498A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
