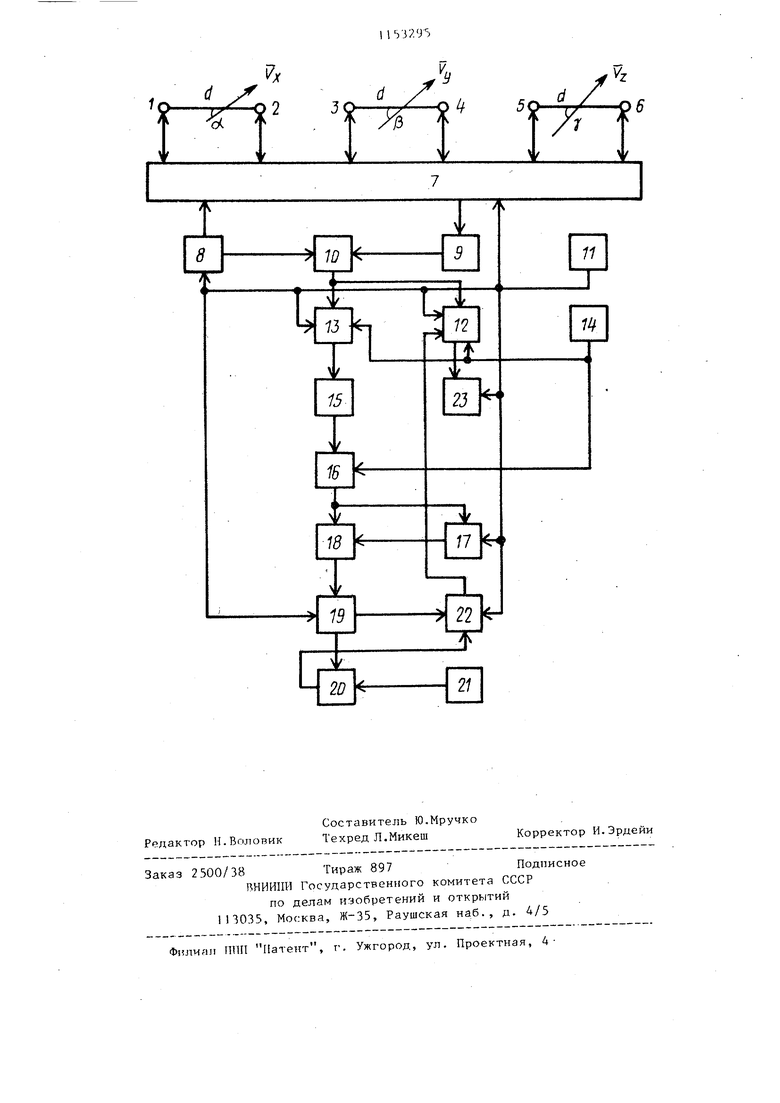
ИэОВретение относится к акустическим измерениям и может быть использовано для измерения компонент вектора скорости движения потока и координат движущихся потоков. Известен ультразвуково измеритель скорости движения потока, содержащий электроакустические преобразователи, антенный коммутатор, передатчик, приемник и блок обработ ки измерительной информации ij . Недостатком данного устройства является отсутствие возможности ком пенсировать изменяющуюся во времени временную задержку распространения сигнала в электроакустическом тракт электрических цепях, линиях связи И связанную с этой задержкой инстру ментальной погрешностью измерений. Известен ультразвуковой измеритель трех компонент вектора скорост потока, содержаний восемь приемных электроакустических преобразователей, один излучающий электроакустический преобразователь, передатчик, приемник, блок обработки измеритель ной информации . Однако известное устройство обла ет ограниченной точностью, так как при измерениях скорости движения по тока не учитывается изменение во вр мени временной задержки распростран ния сигнала в электроакустическом тракте, электрических цепях и линия СВЯЗИ, не производится автоматическа коррекция погрешности измерения. Наиболее близким по технической сущности к предлагаемому является ультразвуковой измеритель трех компонент вектора скорости потока, содержащий три пары обратимых электро акустических преобразователей, антенный коммутатор, синхронизатор, передатчик, приемник и блоки обрабо ки измерительной информации 3J . Однако устройство не позволяет и мерять с высокой точностью трех ком понент вектора скорости движения по тока, так как при измерениях не учи тывается временная задержка сигнала в электроакустическом тракте, электрических цепях и линиях связи. Цель изобретения - увеличение точности измерения. , Поставленная цель достигается тем, что в устройство, содержащее три пары обрат1шых электроакустичес ких преобразователей, подключенных через коммутатор к передатчику и приемнику, выходы которых подключены к входам преобразователя типа временной интервал - цифровая величина, синхронизатор, два вычислительных устройства, устройство ввода кода базового расстояния и регистрирующий прибор, дополнительно введены блок деления, множительное устройство, блок памяти, два вычитающих устройства, два переключателя и устройство ввода кода временной задержки сигнала, причем вход блока деления соединен с выходом второго вычислительного устройства, а выход его подключен к первому входу множительного устройства, второй вход которого соединен с выходом устройства ввода кода базового расстояния, а выход подключен параллельно к входу блока памяти и к первому входу первого вычитающего устройства, соответственно в,ыход блока памяти соединен с вторым входом первого вычитающего устройства, выход которого соединен с входом первого переключателя, первый выход которого подключен к первому входу второго переключателя, а второй выход первого переключателя соединен с первым входом второго вычитающего- устройства, второй вход которого соединен с выходом устройства ввода кода временной задержки сигнала, выход второго вычитающего устройства соединен с вторым входом второго переключателя, выход которого соединен с первым входом первого вычислительного устройства, причем управлякнцие входы блока памяти, первого и второго переключателей соединены с выходом синхронизатора. На чертеже представлена блок-схема ультразвукового измерителя трех компонент вектора скорости потока. Ультразвуковой измеритель трех компонент вектора скорости потока содержит шесть обратимых электроакустических преобразователей 1-6, коммутатор 7, передатчик 8, приемник 9, преобразователь 10 типа временной интервал-цифровая величина, синхронизатор 11, первое вычислительное устройство 12, второе вычислительное устройство 13, устройство 14 ввода кода базового расстояния, блок 15 деления, множительное устройство 16, блок 17 памяти, первое вычитающее устройство 18, пер3вый переключатель 19, второе вычитающее устройство 20, устройство 21 ввода кода временной задержки сигнала, второй переключатель 22, регистрирующий прибор 23, Три пары электроакустических преобразователей 1, 2, 3, 4 и 5, 6 установлены перпендикулярно между собой, причем все они через коммутатор 7 подсоединены к передатчику 8 и приемнику 9. Выходы передатчика 8 и приемника 9 соответственнр подсоединены к первому и второму входам преобразователя 10 типа .временной интервал-цифровая величина, выход к торого параллельно соединен с первы входом второго вычислительного устройства 13 и вторым входом первого вычислительного устройства 12, выход которого соединен с входом реги рирующего прибора 23. Выход второго вычислительного устройства 13 соеди нен через блок 15 деления с первым входом множительного ycтpoйdтвa 16, второй вход которого параллельно соединен с выходом устройства 14 йвода кода базового расстояния, вто рым входом второго вычислительного устройства 13 и третьим входом первого вычислительного устройства 12. Выход множительного устройства 16 подключен параллельно к входу блока 17 памяти и к первому входу первого вычитающего устройства 18, а выход блока J7 памяти соединен с вторым входом- первого вычитающего устройства 18, выход которого соединен с входом первого переключателя 19, первый выход которого подключен к первому входу второго переключателя 22. Второй выход первого переключателя 19 соединен с первым входом второго вычитающего устройства 20, второй .вход которого соединен с выходом устройства 21 ввода кода временной задержки сигнала. Выход второго вычитающего устройства 20 соединен с вторым входом второго переключателя 22, выход которого соединен с первым входом первого вычислительного устройства 12, Управляющие входы передатчика 8, коммутатор 7, первого 2 и второго 13 вычислительных устройств, первого 19 и вто рого 22 переключателей, блока 17 па мяти и регистрирующего прибора 23 соединены с выходом синхронизатора П. 54 Устройство работает следующимоОразом. Обратимые .электроакустические преобразователи 1 и 2 служат для иэмерения компоненты вектора скорости потока cos«, где V - модуль вектора скорости потока-; Л - угол между траекторией акустического импульса в канале X и вектора V. Обратимые электроакустические преобразователи 3 и 4 служат для измерения компоненты вектора скорости потока Vu V cos ft, где - угол между траекторией акустического импульса в канале У и вектора V. Обратимые электроакустические преобразователи 5 и 6 служат для измерения компоненты вектора скорости потока V V cosjf, где f - угол межДУ траекторией акустического импульса в канале Z и вектора V. В первом такте i-ro цикла измереН14Я поток зондируется акустическими импульсами, излучаемыми электроакустическими преобразователями 1 и 2 по направлению и против направления потока. Зондирующие импульсы . от передатчика 8 через коммутатор 7 поступают на электроакустический преобразователь 1 или 2 соответственно. Принятые электроакустическими преобразователями 2 или 1 зондирующие импульсы череэ коммутатор 7, поступают на вход приемника 9. Работой передатчика 8 и коммутатора 7 управляет синхронизатор 11.. При этом время прохождения акустического импульса по направлению потока в канале X определяется выражением где d - базовое расстояние парами электроакустических преобразователей 1 и 2,- 3 и 4, 5 и 6; скорость ультразвука в исследуемом потоке; паразйтная временная задерж ка распространения акустического импульса в линиях связи и электрических цепях канала X. Время прохождения акустического. импульса против направления потока в канале--Х ойределяется выражеиием
На преобразователь 10 типа временной интервал цифровая величина опорный импульс подается с выхода передатчика 8, а измерительный - с выхода приемника 9. В преобразователе 10 типа временной интервал цифровая величина время и tj преобразуется в цифровые величины
NqxJ и tgx Ngj. На вход
-ак
первого вычитающего устройства 18 с выхода блока 17 памяти поступает цифровая величина (i-I ) , вычисленная блоками 15 и 16 и записанная в блок 17 за время (i-l)-ro цикла измерения. Вычисление цифровой величины Ic/CxCi-l) за время (i-)-ro цикла измерения осуществляется аналогично, как и за время i-Toro цикла измерения.
Измеренное значение скорости ультразвука - цифровая величина с,; в канапе X за время i-ro цикла измерения вычисляется вторым вычислительным устройством 13 согласно выражению
аК; NS.
N
где 1C - цифровая величина, пропорциональная половине базово го расстояния. Цифровая величина сх;- преобразуется в обратную цифровую величину 1/сх; блоком 15 деления и умножается на цифровую величину k множительным устройством 16. Первым вычитающим устройством 18 вычисляется цифровая величина , пропорциональная изменяющейся систематической составляющей временной задержки рас пространения сигнала между (1-1)-м и i-M циклами измерения, как разность между содержимым блока 17 памяти и выходной цифровой величиной множительного устройства 16.
К
iSi- 77
-х;
После определения цифровой величины iSy; в блок 17 памяти вместо цифроврй величины K/Cx(i-l) записывается цифровая величина .
Далее цифровая величина 4txi через первый переключатель 19 поступает на первьгй вход второго вычитающего устройства 20, которым определяется поправка - цифровая величина Ту; для коррекции погрешности измерения скорости потока за время
i-ro цикла измерения в канале X Цифровая величина определяется выражением
Т,(Т-1,;),,
где Т - цифровая величина, пропорциональная постоянной систематической составляющей временной задержки распространения сигнала.
Цифровая величина Т вьщается устройством ввода кода временной задержки сигнала 21.
Цифровая величина , пропорциональная компоненте V вектора скорости потока Vj,)(, вычисляется первым вычислительным устройством 12 выражением
II - V
20
NavfTx. %хГТх;
X 7
И на этом заканчивается первый такт i-ro цикла измерения-.
Во втором такте i-ro цикла узмерения выход вычитающего устройства
5 18 через перек.точатели 19 и 22 соединен с первым входом первого вычислительного устройства 12. Одновременно поток зондируется акустическими импульсами, излучаемыми по на0правлению и против направления потока электроакустическими преобразователями 3 и 4. При этом время прохождения акустического импульса по направлению потока в канале У
5 определяется
t
+ С euj e-t-V
Я
Ч
где (
- временная задержка распространения акустического импульса в электроакустическом тракте, электрических цепях и линиях связи канала У.
Против направления потока в том же канале имеем
Ь
ЧГ
C-V
Блоком 10 неличины t и tjy
преобразуются в цифровые величины Nfl Njy.-vtg,.
Измеренное значение скорости ультразвука - цифровая величина с yj в канале У за время i-ro цикла
измерения вычисляется вычислительным устройством 13 выражением
„ . JL
4- Л- No
-а-ц
.В блоке 15 деления нифроная величина Cyi преобразуется н обратную цифровую величину l/Cn и умножается на цифровую величину К множительным устройством 16. Первым вычитающим устройством 18 определяется поправка - цифровая величина Ти для коррекции погрешности измерения скорости потока за время i-ro цикла измерения в канале У.
)
т . - I ,;
Y
Цифровая величина V|jJ , пропорциональная компоненту V). вектора скорости потока Vy; , вычисляется первым вычислительным устрои ством 12 выражением
V . (,
;/
V т . Т - XT т- / с
;i
N-s,i -Т,.
N -Т аЦ )
и на этом заканчивается второй такт i-ro цикла измерения.
В третьем такте i-ro цикла измерения поток зондируется акустическими импульсами, излученными электроакустическими преобразователями 5 и 6. При этом время прохождения акустического импульса по направлению потока в канале определяется выражением
о.
ог
C+V,
где 1 временная задержка распространения акустического импульса в электроакустическом тракте, электрических цепях и линиях связи канала Z.
Против направления потока d
Блоком 10 величины t образуются в цифровые величины
NciKr taj; Ns.-tgj,.
Измеренное значение скорости ультразвука, - цифровая величина в канале Z за время i-ro цикла измерения вычисляется вторым вычислительным устройством 13 выражением
,..Х. ., J
.«,,
Блоком 15 деления цифровая величина C.J преобразуется в обратную цифровую величину и умножается на цифровую величину t множительным устройством 16. Первым вычитающим устройством 18 определяется поправка - цифровая величина Т-для коррекции погрешности измерения скорости потока за время i-ro цикла измерения в канале Z.
-) (,
-Xi
Цифровая величина V;,; , пропорциональная компоненте V вектора скорости потока , вычисляется первым вычислительным устройством 12 выражением
) - V
.j N.-T,,
Предложенное устройство по сравнению с известным позволяет увеличить точность измерения трех компонент вектора скорости потока. Увеличение точности достигается тем, что в каждом цикле измерения осуществляется автоматическая коррекция погрешности измерения путем компенсации не только постоянной составляющей, но и изменяющейся во времени составляющей систематической погрешности
5 устройства, вызванной нестабильностью во времени временной задержки распространения сигнала в электроакустическом тракте, электрических цепях и линиях связи.
Использование предложенного ультразвукового измерителя трех компонент вектора скорости потока наиболее полезно при построении высокоточных быстродействующих телеизмерителей, предназначенных для автоматизированных систем управления транспортируемыми подводными аппаратами и тралами глубоководного лова рыбы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель скорости потока | 1981 |
|
SU970223A1 |
| Ультразвуковой измеритель флуктуацийСКОРОСТи пОТОКА | 1979 |
|
SU838575A1 |
| Цифровой измеритель скорости ультразвука | 1984 |
|
SU1180798A1 |
| Способ измерения скорости распространения акустических колебаний в движущихся средах | 1986 |
|
SU1434361A1 |
| Десантный метеорологический комплект (варианты) | 2023 |
|
RU2811805C1 |
| ЭХОЛОТ | 2012 |
|
RU2523101C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ШУМОВ В ПАССАЖИРСКОМ САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2504025C2 |
| Устройство для измерения скорости потока жидкости и газа | 1975 |
|
SU552559A1 |
| Устройство для считывания графической информации | 1976 |
|
SU934512A1 |
| Устройство для градуировки импульсного ультразвукового измерителя скорости потока | 1979 |
|
SU870957A1 |
УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬ ТРЕХ КОМПОНЕНТ ВЕКТОРА СКОРОСТИ ПОТОКА, содержащий три пары обратимых электроакустических преобра-, зователей, подключенньк через коммутатор к передатчику и приемнику, выходы которых подключены к входам преобразователя типа вре менной интервал-цифровая величина, синхронизатор, два вычислительных устройства, устройство ввода кода баз.ового расстояния и регистрирующий прибор, отличающий. с я тем, что, с целью увеличения точности измерения, в него дополнительно введены блок деления, множи- тельное устройство, блок памяти, два вычитающих устройства, два переключателя и устройство ввода кода временной задержки сигнала, причем вход блока деления соединен с выходом второго вычислительного устройства, а выход его подключен к первому входу множительного устройства, второй вход которого соединен с выходом устройства ввода кода базового расстояния, а выход подключен параллельно к входу блока памяти и к первому входу первого вычитающего устройства, соответственно выход блока памяти соединен с вторым входом первого вычитающего устройства, (/) выход которого соединен с входом первого переключателя, первьтй выход которого подключен к первому входу второго переключателя, а второй выход первого переключателя соединен с первым входом второго вычитающего устройства, второй вход которого соединен с выходом устройства ввода кода временной задержки сигнала, выход второго вычитающего устройства соединен с вторым входом второго переключателя, выход которого соеди- ней с первым входом первого вычислительного устройства, причем управляющие входы блока памяти , первого и второго переключателей соединены с выходом синхро- низатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ № 2947318 кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| В.П | |||
| Трехкомпонентный акустический измеритель скорости движения | |||
| Тезисы докладов первой Всесоюзной конференции по исследованию и освоению ресурсов Мирового океана, Владивосток, 1976, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
