Предлагаемое изобретение относится к гидроакустическим системам определения глубины и к системам навигации и может быть использовано в эхолотах с автоматическим адаптивным обнаружением эхо-сигналов от дна и измерением глубины с привязкой к географическим координатам места измерения.
Известен эхолот, защищенный патентом РФ №2123191, G01S 15/00, 1998, содержащий генератор импульсов, электроакустический преобразователь, блок индикации, измеритель временных интервалов (ВАРУ), блок временной автоматической регулировки усиления, синхронизатор, усилитель, детектор и пороговое устройство.
Признаками, общими с заявляемым эхолотом и присутствующими в той или иной степени в этом аналоге, являются генератор импульсов, электроакустический преобразователь, измеритель временных интервалов и блок ВАРУ.
Работа этого аналога, как и большинства остальных эхолотов, основана на измерении промежутка времени между излучением зондирующего сигнала в направлении морского дна и поступлением отраженного от морского дна эхо-сигнала.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является крайне низкая точность измерения глубины, обусловленная неадаптивностью порогового устройства в условиях изменяющегося уровня шумов, затрудняющего обнаружение эхо-сигналов от дна.
Известна также акустическая система измерения расстояния, защищенная европейским патентом №0340953, G01S 7/52, G01S 15/88, 1989, содержащая ЭВМ, дисплей, аналого-цифровой преобразователь, приемник акустических эхо-сигналов электроакустический преобразователь, цифроаналоговый преобразователь, передатчик, блок памяти и ряд интерфейсов.
Признаками, общими с заявляемым устройством, в этом аналоге являются ЭВМ, дисплей, аналого-цифровой преобразователь, приемник акустических эхо-сигналов и электроакустический преобразователь.
В этой системе используется адаптивный порог обнаружения, поэтому точность измерения глубины в ней несколько выше, чем в указанном выше аналоге.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является относительно низкая точность измерения глубины, что обусловлено невозможностью добиться оптимального с точки зрения минимизации погрешности измерения соотношения сигнал/помеха для каждого значения глубины.
Наиболее близким по технической сущности к заявляемому (прототипом) является эхолот, защищенный патентом РФ №2241242, G01S 15/08, G01S 7/52, 2004, содержащий ЭВМ, дисплей, электроакустический преобразователь, приемник акустических эхо-сигналов, аналого-цифровой преобразователь, блок ВАРУ и передатчик.
Все перечисленные элементы этого эхолота-прототипа, кроме блока ВАРУ и передатчика, входят и в состав заявляемого эхолота.
В этом эхолоте периодически излучается сигнал, мощность которого вычисляется по определенному алгоритму. Коэффициент усиления приемника регулируется по двум входам управления, один из которых подключен к блоку ВАРУ, второй - к ЭВМ. Выходной сигнал приемника с помощью аналого-цифрового преобразователя оцифровывается и поступает на обработку в ЭВМ с целью обнаружения эхо-сигнала, отраженного от дна и измерения глубины по определенной формуле с последующим выводом полученного значения на дисплей.
Причинами, препятствующими достижению в эхолоте-прототипе технического результата, достигаемого в изобретении, являются следующие.
Во-первых, это аппаратурная реализация блока ВАРУ. Она делает закон ВАРУ недостаточно эффективным в условиях разнообразия акватории, времен года, степени солености и температуры воды. Желательно иметь набор законов ВАРУ и возможность оперативного выбора нужного закона, что в условиях аппаратурной реализации блока ВАРУ крайне затруднительно.
Во-вторых, низкая помехозащищенность, обусловленная наличием большого количества входов управления, по которым помехи могут поступать в эхолот-прототип (два входа управления в приемнике и один в передатчике). Кроме того, отсутствие развязки между выходом передатчика и входом приемника создает условия для просачивания мощного импульса с выхода передатчика непосредственно на вход приемника. Это существенно снижает надежность эхолота-прототипа.
В-третьих, существенно ограничены выполняемые эхолотом-прототипом функции. Дело в том, что зачастую возникает необходимость не просто измерить глубину, но и привязать результат измерения к тому месту, где осуществляются измерения. Эту функцию устройство-прототип реализовать не позволяет.
Технической задачей, на решение которой направлено изобретение, является обеспечение универсальности закона ВАРУ, а также повышение помехозащищенности и надежности эхолота и расширение его функциональных возможностей за счет возможности привязки результатов измерения к географическим координатам места его проведения.
Технический результат достигается тем, что в известный эхолот введены приемник сигналов спутниковых радионавигационных систем, выход которого соединен с третьим входом ЭВМ, усилитель мощности, вход которого соединен с третьим выходом ЭВМ, и переключатель «прием-передача», вход которого соединен с выходом усилителя мощности, вход-выход - с входом-выходом электроакустического преобразователя, управляющий вход - с четвертым выходом ЭВМ, а выход - с сигнальным входом приемника акустических эхо-сигналов, при этом приемник акустических эхо-сигналов выполнен с одним входом управления.
Для технического результата в известный эхолот, содержащий электронно-вычислительную машину (ЭВМ), устройство отображения информации (дисплей), вход которого соединен с первым выходом ЭВМ, электроакустический преобразователь, приемник акустических эхо-сигналов, вход управления которого соединен со вторым выходом ЭВМ, и аналого-цифровой преобразователь, вход которого соединен с выходом приемника акустических эхо-сигналов, а выход соединен с первым входом ЭВМ, введены приемник сигналов спутниковых радионавигационных систем, выход которого соединен со вторым входом ЭВМ, усилитель мощности, вход которого соединен с третьим выходом ЭВМ, и переключатель «прием-передача», вход которого соединен с выходом усилителя мощности, вход-выход - с входом-выходом электроакустического преобразователя, управляющий вход - с четвертым выходом ЭВМ, а выход - с сигнальным входом приемника акустических эхо-сигналов, при этом приемник акустических эхо-сигналов выполнен с одним входом управления.
Совокупность вновь введенных элементов и связей и особенности выполнения приемника неизвестна из имеющихся в распоряжении заявителя источников информации. Поэтому заявляемый эхолот следует считать новым и соответствующим изобретательскому уровню.
Сущность изобретения поясняется фиг.1, на которой приведена структурная схема заявляемого эхолота.
Эхолот содержит ЭВМ 1, усилитель 2 мощности, приемник 3 акустических эхо-сигналов, приемник 4 сигналов спутниковых радионавигационных систем, переключатель 5 «прием-передача», электроакустический преобразователь 6, аналого-цифровой преобразователь 7 и дисплей 8.
Первый вход ЭВМ 1 соединен с выходом преобразователя 7, а второй - с выходом приемника 4. Первый выход ЭВМ 1 соединен с входом дисплея 8, второй - с входом управления приемника 3, третий - с входом усилителя 2, а четвертый - с управляющим входом переключателя 5. Сигнальный вход переключателя 5, вход которого соединен с выходом усилителя 2, вход-выход - с входом-выходом преобразователя 6, а выход - с сигнальным входом приемника 3, выход которого соединен с входом преобразователя 7.
Работа эхолота заключается в следующем.
Функцию передатчика выполняет ЭВМ 1 совместно с усилителем 2. ЭВМ 1 формирует на своем третьем выходе последовательность прямоугольных импульсов с заданными длительностью τ и периодом Т повторения и регулируемой амплитудой. Параметры τ и Т заранее устанавливаются в ЭВМ. Амплитуда этих импульсов с помощью ЭВМ 1 может изменяться примерно в 15 раз в зависимости от измеряемой глубины. Эти импульсы поступают на вход усилителя 2 мощности с постоянным коэффициентом усиления, а усилитель 2 работает в линейном режиме. В нем поступающие на его вход импульсы усиливаются до уровня мощности примерно 200 Вт при максимальной амплитуде входного импульса.
С выхода усилителя 2 мощный импульс поступает на сигнальный вход переключателя 5 и через него на преобразователь 6. К началу действия этого импульса переключатель 5 под действием управляющего сигнала с третьего выхода ЭВМ 1 подключает свой сигнальный вход к входу-выходу и отключает сигнальный вход приемника 3 от своего выхода, предотвращая тем самым попадание мощного импульса с выхода усилителя 2 на вход приемника 3.
Преобразователь 6 преобразует поступивший на его вход мощный импульс в звуковой сигнал и излучает его в направлении дна.
После окончания цикла излучения переключатель 5 под действием управляющего сигнала с четвертого выхода ЭВМ 1 подключает сигнальный вход приемника 3 к преобразователю 6, и начинается цикл приема эхо-сигнала.
Принятый приемником 3 эхо-сигнал с его выхода поступает на вход преобразователя 7, где оцифровывается и уже в цифровом виде поступает на первый вход ЭВМ 1.
В ЭВМ 1 поступивший на его вход в виде массива последовательных отсчетов эхо-сигнал обрабатывается в соответствии с заданным алгоритмом выделения донного сигнала, описанным, например, в эхолоте-прототипе.
Реализация требуемого закона ВАРУ приемника в предлагаемом эхолоте осуществляется алгоритмически с помощью ЭВМ 1. Для реализации этого закона используется тот же оцифрованный эхо-сигнал на первом входе ЭВМ 1. В качестве такового закона используется обобщенная функция управления усилением приемника, изменяющая коэффициент его усиления в пределах порядка 120 дБ. ЭВМ позволяет реализовать практически любое нелинейное преобразование сигнала, каковым является закон ВАРУ. При этом легко могут быть реализованы несколько разных законов и обеспечен оперативный выбор требуемого в соответствии с реальными условиями работы эхолота.
Обобщенный сигнал управления усилением приемника поступает со второго выхода на вход управления приемника 3. В результате изменения коэффициента усиления приемника 3 диапазон изменения эхо-сигнала на его выходе поддерживается в диапазоне, обеспечивающем максимум отношения «сигнал/помеха».
В результате обработки в ЭВМ 1 эхо-сигнала определяется задержка донного сигнала относительно излученного, которая пересчитывается в подлежащую измерению глубину.
Приемник 4 принимает сигналы спутниковых радионавигационных систем, по которым определяет координаты объекта-носителя эхолота. Эти координаты поступают на второй вход ЭВМ 1. В ЭВМ 1 они объединяются с результатами определения глубины в отдельный формуляр, который заносится в память ЭВМ и с первого выхода ЭВМ 1 выводится на дисплей 8.
Таким образом, в предлагаемом эхолоте осуществляется не только измерение глубины, но и привязка результата измерения к географическим координатам места измерения. Эхолот позволяет реализовать практически любой закон ВАРУ в приемнике, так как его реализация не требует аппаратурных затрат, а осуществляется чисто программным путем.
В эхолоте существенно сокращено число входов управления, по которым могут поступать помехи. Кроме того здесь отсутствует какая-либо связь между выходом передатчика и входом приемника. Это существенно повышает помехозащищенность и надежность работы эхолота по сравнению с прототипом.
Предлагаемый эхолот значительно проще, чем прототип. Здесь исключена аппаратурная реализация блока ВАРУ, а передатчик заменен простым усилителем. Это дополнительно повышает надежность эхолота по сравнению с прототипом.
Эхолот достаточно легко реализуем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭХОЛОТ | 2009 |
|
RU2390796C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| Эхолот | 2022 |
|
RU2789812C1 |
| Эхолот | 2019 |
|
RU2719210C1 |
| Эхолот | 2023 |
|
RU2828233C1 |
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| ЭХОЛОТ ДЛЯ РАСПОЗНАВАНИЯ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2007 |
|
RU2348054C1 |
| ЭХОЛОТ С ЛЕДОВОЙ ЗАЩИТОЙ | 2013 |
|
RU2523104C1 |
| Малоразмерный ультразвуковой измеритель расстояния | 2019 |
|
RU2720640C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2004 |
|
RU2292529C2 |
Использование: изобретение относится к гидроакустическим системам определения глубины и к системам навигации и может быть использовано в эхолотах с автоматическим адаптивным обнаружением эхо-сигналов от дна и измерением глубины с привязкой к географическим координатам места измерения. Сущность: эхолот содержит ЭВМ 1, усилитель 2 мощности, приемник 3 акустических эхо-сигналов, приемник 4 сигналов спутниковых радионавигационных систем, переключатель 5 «прием-передача», электроакустический преобразователь 6, аналого-цифровой преобразователь 7 и дисплей 8. Первый вход ЭВМ 1 соединен с выходом преобразователя 7, а второй - с выходом приемника 4. Первый выход ЭВМ 1 соединен с входом дисплея 8, второй - с входом управления приемника 3, третий - с входом усилителя 2, а четвертый - с управляющим входом переключателя 5. Сигнальный вход переключателя 5 соединен с выходом усилителя 2, вход-выход - с входом-выходом преобразователя 6, а выход - с сигнальным входом приемника 3, выход которого соединен с входом преобразователя 7. Технический результат: повышение помехозащищенности и надежности эхолота, расширение его функциональных возможностей. 1 ил.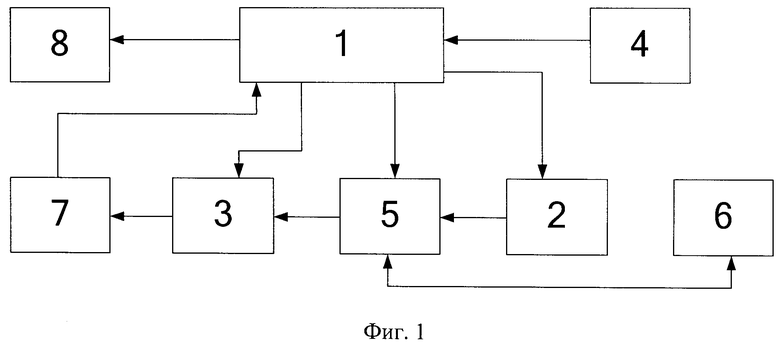
Эхолот, содержащий электронно-вычислительную машину (ЭВМ), устройство отображения информации (дисплей), вход которого соединен с первым выходом ЭВМ, электроакустический преобразователь, приемник акустических эхо-сигналов, вход управления которого соединен со вторым выходом ЭВМ, и аналого-цифровой преобразователь, вход которого соединен с выходом приемника акустических эхо-сигналов, а выход соединен с первым входом ЭВМ, отличающийся тем, что в него введены приемник сигналов спутниковых радионавигационных систем, выход которого соединен со вторым входом ЭВМ, усилитель мощности, вход которого соединен с третьим выходом ЭВМ, и переключатель «прием-передача», вход которого соединен с выходом усилителя мощности, вход-выход - с входом-выходом электроакустического преобразователя, управляющий вход - с четвертым выходом ЭВМ, а выход - с сигнальным входом приемника акустических эхо-сигналов, при этом приемник акустических эхо-сигналов выполнен с одним входом управления.
| ЭХОЛОТ | 2009 |
|
RU2390796C1 |
| Устройство для обнаружения эхо-сигналов | 1991 |
|
SU1802352A1 |
| Эхолот | 1981 |
|
SU1054809A1 |
| US 6667934 B1, 23.12.2003 | |||
| KR 101133171 B1, 06.04.2012 | |||
| Устройство для измерения расстояния | 1991 |
|
SU1802351A1 |

