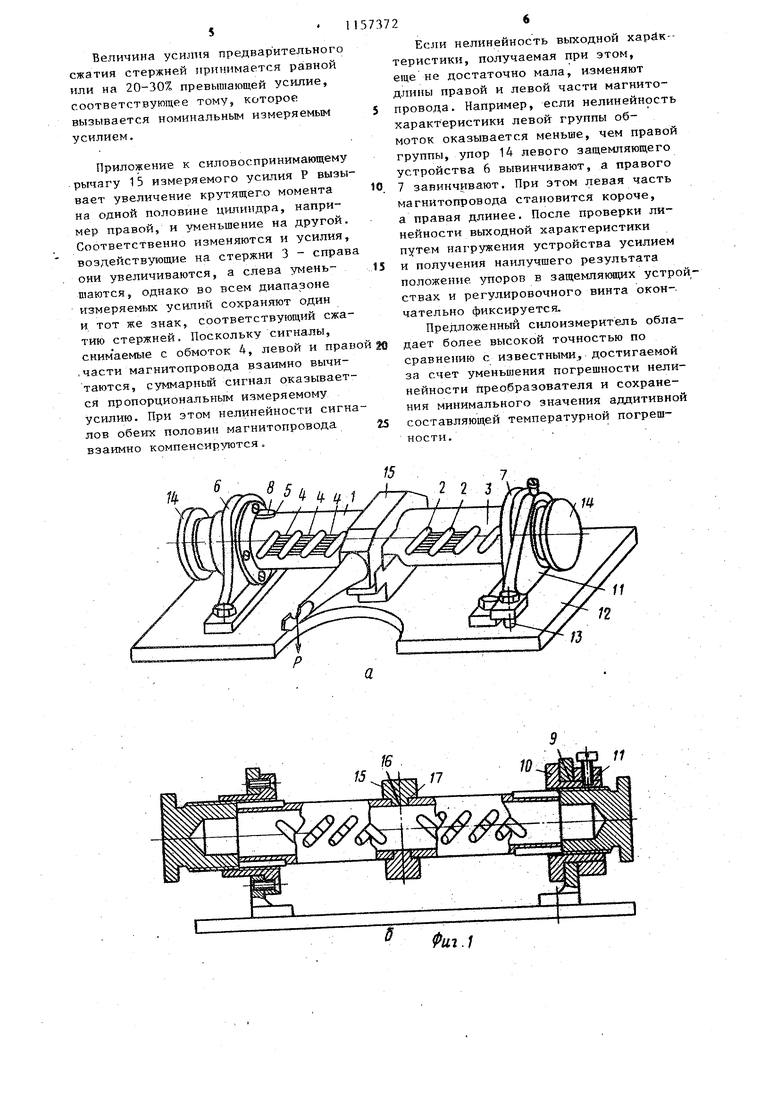
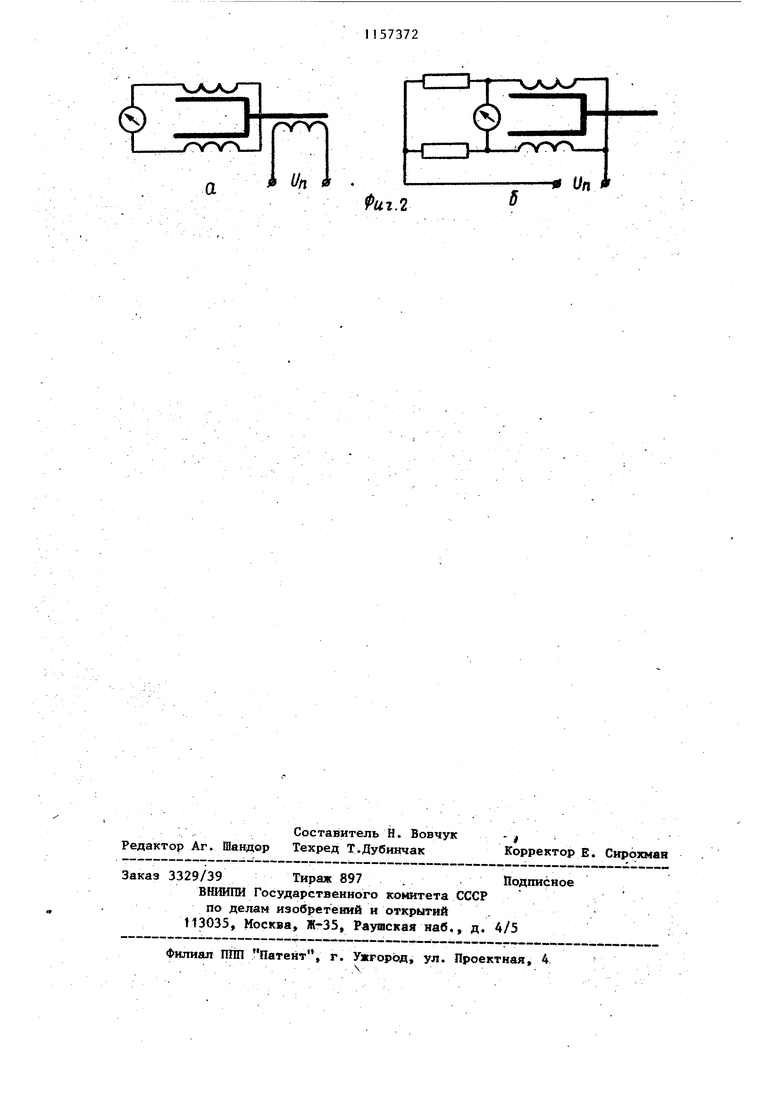
Изобретение относится к измерительной технике и может быть исполь зовано в системах автоматического измерения массы и усилий. Известно силоизмерительное устро ство, в котором в качестве чувствительного элемента использован полый цилиндр, изготовленный из ферро магнитного материала. Один торец цилиндра жестко зафиксирован на неподвижном основании, а к другому прикреплен радиально расположенный рычаг, к концу которого прилагают и меряемое усилие. На цилиндре распол жены две группы обмоток. Витки одно из них расположены по образующим и охватывают стенку цилиндра, эта обмотка является намагничивающей. Витки второй охватывают весь цилинд и лежат в плоскости, перпендикулярной оси цилиндра. С этой обмотки сн i мают выходной сигнал 1. Недостатками данного устройства являются относительно высокий уровень выходного сигнала при равенств нулю измеряемого усилия, малое приращение сигнала, большая погрешност нелин ейности и температурная по-, грешность, т.е. оно обеспечивает низкую точность измерения усилий. Наиболее близким по технической сущности к предлагаемому является торсионный датчик усилия, содержавщй польш цилиндр, в стенках которо го выполнены удлиненные отверстия, расположенные под углом 45 к образующей цилиндра, параллельно друг другу и равномерно вдоль образующей. На стержнях, лежащих между отверстиями, размещены обмотки. Концы цилиндра зафиксированы жестко на неподвижном основании защемляюцр{ми устройствами. Силовоспринимающ рычаг закреплен посередине цилиндра симметрично относительно его концов Обмотки, расположенные по обе стороны от силовоспринимающего рыча га, соединены последовательно в две группы, а выходные сигналы обеих групп - между собой встречно. При отсутствии измеряемого усили т.е. при равенстве нулю крутящего момента, напряжения на выходе двух групп обмоток близки по величине и при их встречном включении суммар ный выходной сигнал близок нулю. Пр значениях момента, отличных от нуля стержни, на которых расположены обмотки, испытьшают напряжения, причем по одну сторону от рычага это будут напряжения сжатия, а по другую растяжения. При этом суммарный выходной сигнал возрастает по мере увеличения приложенного к рычагу усилия 23. Однако известное устройство имеет низкую точность измерения усилий, обусловленную большой погрешностью нелинейности, достигающей значений порядка 5-6% и даже более. Цель изобретения - повьщтение точности измерения усилий. Поставленная цель достигается тем, что.в силоизмеритель, содержащий магнйтопровод в виде полого цилиндра с удлиненными параллельными отверстиями, выполненными в его стенках под углом к образующей, обмотки, размещенные на стержнях между отверстиями, основание, защемляющие устройства, расположенные на концах цилиндра и Силовоспринимающий рычаг, закрепленный на цилиндре симметрично относительно его коНцрв, введены упоры, контактирующие с торцами цилиндра и закрепленные на защемляющих устройствах с возможностью перемещения вдоль оси цилиндра, на концах которого выполнены пазы, а на защеиляющих устройствах выполнены выступы, при этом одно из защемляющих устройств состоит из неподвижного цилиндрического гнезда и поворотной втулки с рычагом, соединенным с основанием регулировочным винтом. Выполнение на концах цилиндра по образующим пазов, в которые входят выступы, защемляющих устройств, и выполнение одного из защемляющих устройств в виде неподв1сжного цилиндрического гнезда и входящей в него поворотной втулки позволяет создать в цилиндрическом преобразователе крутящий момент при отсутствии измеряемого усилия (). Соединение рычага поворотной втулки с основанием посредством регулировочного винта, направленного перпендикулярно радиусу цилиндра, позволяет плавно изменять величину воздействующего на цилиндр крутящего момента путем завинчивания или вывинчивания винта, а также фиксировать защемляющее устройство при нужном значении крутящего момента. Этим обеспечивается возможность получения лин1ейной выходной характеристики по следующей причине. Созданный.посредством регулирово ного винта крутящий момент имеет знак, соответствующий сжатию стержней (промелсутков между окнами) цили рического магнитопровода, причем при. равенстве нулю измеряемог-о усилия этот момент имеет по обе ст.орон от силовоспринимающего рычага одно иТО же значение, которому соответс вуют усилия предварительного сжатия стержней. При воздействии измеряемого усилия Р на силовоспринимающий рычаг появляется дополнительный крутящий момент, который по одну cTOpofiy от рычага имеет тот же знак, что и момент предварительного нагружения, а по другую - противоположный. В некоторых случаях и при наличии предварительного крутящего момента коэффициенты относительной нелинейности могут оказаться нескол ко отличными по величине. Это может быть вызвано неточностью изготовлен магнитопровода, некоторым различием в числе витков обмоток левой и прав части или различием в фактическом поведении ферромагнетика при упругих напряжениях, больших и меньших вели чины напряжения, обусловленной моментом предварительного нагружения Для устранения остаточной нелинейности торцы цилиндра прилегают к упорам, соединенным с защемляющими устройствами резьбой, соосной с цилиндром. Это позволяет, завинчивая один из ytiopoB (например, левый) и вывинчивая другой (правый), изменять длину частей цилиндра, расположенных .справа и слева от силовоспринимающег рычага. При этом крутящий момент, воздействующий на более короткую часть магнитопровода, будет несколько больше,а на более длинную - меньш Угол закручивания цилиндра в месте крепления рычага один и тот же для правой и левой части, поскольку они.представляют единое целое. Таким образом, выполнение в защемляющих устройствах упоров, соединенных с защемляющими устройствами резьбой, соосной с цилиндром, позволяет плавно регулировать соотношение длин правой и левой частей цилиндра путем завинчивания и вывинчивания упоров и за счет этого про724изводить компенсацию остаточной нелине1 1ности выходной характеристики преобразователя. На фиг. 1 показана конструкция предлагаемого устройства, общий вид.( « - аксонометрическое изображение, 5 - сечение по продольной оси) на фиг. 2 - схемы соединения обмоток ( а - дифференциально-трансформаторный вариант, 6 - дифференциальнодроссельный вариант). Устройство представляет собой магнитоупругий преобразователь 1, изготовленный в виде полого цилиндра, в стенках которого профрезерованы удлиненные окна 2, расположенные под углом 45° к образукщей и равноМерно вдоль нее. Промежутки между окнами образуют стержни 3, на которые уложены обмотки 4. На концах цилиндра выполнены продольные .пазы 5. Концы цилиндра 1 входят в защемляющие устройства 6 и 7, причем выступы 8 защемляющих устройств входят в пазы цилиндра. Защемляющее устройство 7 представляет соб.ой неподвижное цилиндрическое гнездо 9, в которое входит поворотная втулка 10 с рычагом 11. Оба защемляющих устройства закреплены на общем основании 12. Рычаг 11 поворотной втулки 10 соединен с основанием 12 регулировочным винт том 13. В защемляющие устройства 6 и 7 входят на резьбе упоры 14, соосные с цилиндром преобразователя 1, завинчиваемые До соприкосновения с торцами цилиндра.f Точно посередине цилиндра крепится силовоспринимающий рычаг 15 посредством шипов 16, входящих в отверстия 17 цилиндра. Устройство работает следующим образом. Посредством завинчивания регуировочного винта 13 создается омент предварительного нагружения, оторый вызывает в стержнях 3 усилия редварительного нагружения Р, одиаковые во всех стержнях, располоенных справа и слева от силовосприимающего рычага 15. Упоры 14 в заемляюцргх устройствах 6 и 7 при этда аходятся в таком положении, что лины правой и левой части цилиядра т силовоспринимающего рычага для ащемляющего устройства равны.
Величина усилия предварительного сжатия стержней принимается равной или на 20-30% превышающей усилие, соответствующее тому, которое, вызывается номинальным измеряемым усилием.
Приложение к силовоспринимающему рьтагу 15 измеряемого усилия Р вызывает увеличение крутящего момента на одной половине цилиндра, например правой, и уменьшение на другой. Соответственно изменяются и усилия, воздействующие на стержни 3 - справ они увеличиваются, а слева уъ еньшаются, однако во всем диапазоне измеряемых усилий сохраняют один и тот же знак, соответствующий сжатию стержней. Поскольку сигналы, снимаемые с обмоток 4, левой и прав .части магнитопровода взаимно вычитаются, суммарньй сигнал оказывается пропорциональным измеряемому усилию, при этом нелинейности сигналов обеих половин магнитопровода взаимно компенсируются.
Если нелинейность выходной харйк-теристики, получаемая при этом, еще не достаточно мала, изменяют длины правой и левой части магнитопровода. Например, если нелинейность характеристики левой группы обмоток оказывается меньше, чем правой группы, упор 14 левого защемляющего устройства 6 вывинчивают, а правого 7 завинчивают. При этом левая часть магнитопровода становится короче, а правая длинее. После проверки линейности выходной характеристики путем нагружения устройства усилием и получения наилучшего результата положение упоров в защемляющих устро ствах и регулировочного винта окончательно фиксируется.
Предложенный силоизмеритель обладает более высокой точностью по сравнению с известными, достигаемой за счет уменьшения погрещности нелинейности преобразователя и сохранения минимального значения аддитивной составляющей температурной погрешности. , 

| название | год | авторы | номер документа |
|---|---|---|---|
| Силоизмеритель | 1987 |
|
SU1500873A1 |
| Силоизмерительное устройство | 1981 |
|
SU998877A1 |
| Силоизмерительное устройство | 1983 |
|
SU1170294A1 |
| Датчик усилия прокатки | 1987 |
|
SU1425479A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА | 2012 |
|
RU2526786C2 |
| Силоизмерительный датчик | 1975 |
|
SU558182A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ПРОЧНОСТЬ | 2000 |
|
RU2178161C2 |
| СПОСОБ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА И ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2199099C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОВОРОТНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2023 |
|
RU2819305C1 |
| Силоизмерительное устройство | 1990 |
|
SU1767366A2 |
СИЛОИЗМЕРИТЕЛЬ, содержащий магнитопровод в виде полого цилиндра с удлиненными параллел; ьными отверстиями, выполненными в его стенках под углом к образующей,-обмотки, размещеинью на стержнях между отверстиями, основание, защемляющие устройства, расположенные на концах цилиндра и силовоспринимающий рычаг, закрепленный на цилиндре симметрично относительно его концов, отличающийся тем, что, с целью повышения точности измерений, в него введены упоры, контактирующие с торцами цилиндра и закрепленные на защемляющих устройствах с возможностью перемещения вдоль оси цилиндра, на концах которого выполнены пазы, а на защемляющих устройствах выполнены выступы, при этом одно из защемляющих устройств состоит из неподвижного цилиндрического гнезда и поворотной втулки с рычагом, сое(Л С диненным с основанием регулировочным винтом.
Фи1.1
J //Л 0 .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения скручивающих усилий на валу | 1958 |
|
SU122908A3 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гуманюк М.Н | |||
| Матнитоупругие датчики в автоматике | |||
| Киев, Техника , 1978, с | |||
| Соломорезка | 1918 |
|
SU157A1 |
