Изобретение относится к электротехнике и предназначено для использования в качестве пропорционального поворотного исполнительного механизма в системах автоматического управления (САУ) двигателей внутреннего сгорания (ДВС).
Известен пропорциональный поворотный исполнительный механизм (А.с. 1117718 СССР, Электромагнит/ Р.С.Кузнецов, Б.А. Васильев, опубл.07.10.84), содержащий корпус, поворотный вал, жестко соединенный с якорем, выполненным в виде двухполюсного постоянного магнита, рычаг, закрепленный на якоре, и пружина, один конец которой закреплен на рычаге, а другой на корпусе поворотного исполнительного механизма. Среди недостатков можно назвать присутствие двух пар импульсно управляемых полюсов, необходимых для осуществления реверса, что приводит к увеличению времени управления и уменьшению крутящего момента, какой можно было бы снимать с вала, имея ту же пару обмоток, и конструктивно ограниченный рабочий диапазон поворота.
Известно электромагнитное поворотное устройство (А.с. 838937, СССР Электромагнитное поворотное устройство / К.М. Юдин, С.Ф. Дробязко, С.М. Пересада и др./ опубл. 15.06.81), магнитная система которого представляет собой магнитопровод с двумя парами неподвижных относительно друг друга полюсов, катушку, неподвижно установленную в нем, и якорь, представляющий собой полый составной цилиндр, изготовленный в виде четырех секторов, и установленный на валу с возможностью взаимодействия секторов с полюсами магнитопровода. Магнитный крутящий момент, развиваемый на валу, уравновешен пружиной, закрепленной одним концом на магнитопроводе, а другим - на рычаге, неподвижно закрепленном на валу. Недостатком является то, что в конструкции устройства ничего не предусмотрено для корректировки тяговых характеристик и для расширения рабочего диапазона.
Известен поворотный электромагнит (А.с. 1022227 A СССР, Поворотный электромагнит / Л.А. Борисов, С.М. Головкин, И. С. Лединина и др., опубл.07.06.83), содержащий цилиндрический зубчатый статор, ротор, включающий в себя два цилиндрических магнитопровода с кольцевыми проточками, образующими два торцовых элемента, две кольцевые обмотки управления, каждая из которых расположена в кольцевых проточках цилиндрических магнитопроводов ротора между торцовыми элементами, и постоянный магнит, размещенный между указанными цилиндрическими магнитопроводами. Второй торцовой элемент цилиндрического магнитопровода ротора и соответствующий ему участок статора выполнены так, что между ними образован равномерный воздушный зазор. Преобразование входного электрического сигнала в угол поворота вала ротора осуществляется за счет возрастания проводимости одного цилиндрического магнитопровода и убывания другого. Для изменения направления перемещения ротора изменяют направление электрического тока. Электромагнит обладает большой инерционностью, связанной с большой массой ротора и ограниченностью возможностей расширения рабочего диапазона.
Известен также поворотный электромагнитный исполнительный механизм с полюсами-компенсаторами крутящего момента (Pat. 86776078 U.S. Electromagnetic actuator with torgue-compensatingpoles / 09.01.1978), содержащий корпус в виде полого цилиндра, в котором неподвижно установлены обмотка электромагнита и составной статор, состоящий из правой и левой пластины полюсов, выполненных из магнитопроницаемого материала, неподвижно соединенный с двумя торцовыми крышками, в которых на подшипниках установлен поворотный вал, сочлененный со сборным якорем, состоящим из сердечника и левого и правого торцовых дисков якоря, с возможностью поворота вокруг своей оси. Недостатком данной конструкции является сложный профиль полюсов, требующий повышенной точности изготовления и сборки. Данное устройство по своим конструктивным признакам наиболее близко к предлагаемой конструкции и поэтому принимается в качестве прототипа.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании маломощного поворотного исполнительного механизма с широким рабочим диапазоном.
Технический результат заключается в расширении рабочего диапазона исполнительного механизма, в повышении энергоэффективности и в снижении себестоимости.
Указанная задача решается, и технический результат достигается тем, что в электромагнитном поворотном исполнительном механизме, включающем корпус в виде полого цилиндра, в котором неподвижно установлены обмотка электромагнита и составной статор, левая и правая пластины полюсов которого выполнены из магнитомягкого материала и размещены с обоих торцов обмотки, неподвижно соединенный с двумя торцовыми крышками, в которых на подшипниках установлен поворотный вал со сборным якорем, состоящим из сердечника и левого и правого торцовых дисков якоря, выполненных из магнитопроницаемого материала с возможностью поворота вокруг своей оси, оснащен кулачком, установленным на поворотном валу с возможностью угловой настройки с фиксацией его положения с помощью двух винтов, поворотной пружиной, жестко связанной одним концом с кулачком, а другим со стаканом пружины, неподвижно установленным на левой торцовой крышке; датчиком углового положения поворотного вала, жестко установленным на стакане пружины; причем оба торцовых диска якоря выполнены в форме цилиндра и оснащены воздушными пазами, формирующими магнитные шунты, при неизменной величине высот как якоря, так и полюса и при неизменной величине воздушного зазора между полюсами статора и якоря.
Кроме того, магнитные шунты могу быть сформированы в левом и правом торцовых дисках якоря с помощью воздушных пазов таким образом, чтобы величина магнитного крутящего момента при увеличении угла поворота поворотного вала оставалась постоянной, а также магнитные шунты могут быть сформированы в левом и правом торцовых дисках якоря с помощью воздушных пазов таким образом, чтобы величина магнитного крутящего момента при увеличении угла поворота поворотного вала увеличивалась.
Рабочий диапазон исполнительного механизма увеличивается благодаря магнитному шунтированию дисков якоря, под которым обычно понимается «вытеснение» магнитного поля экраном. Это позволяет управлять силовыми линиями магнитного поля, располагая их таким образом, чтобы величина магнитного крутящего момента при увеличении угла поворота поворотного вала тоже увеличивалась, либо оставалась постоянной, а не уменьшалась, как при постоянном радиусе формы полюсов или не шунтированных дисках якоря.
В качестве экрана для шунтирования в данном случае применены воздушные пазы, которые огибаются, как диэлектрик, силовыми линиями магнитного поля и шунтируются целиковой частью якоря. (Кечиев Л.Н., Акбашев Б.Б., Степанов П.В. Экранирование технических средств и экранирующие системы. - М.: ООО "Группа ИДТ", 2010. - 470 с.) Они выполнены непосредственно в левом и правом торцовых дисках якоря.
Таким образом, изменение тяговых характеристик за счет магнитного шунтирования позволяет расширить рабочий диапазон, т.е. увеличить угол поворота, т. к. величину магнитной силы можно не только сохранить на первоначальном уровне, но и увеличивать.
Применение датчика положения вала, т.е. обеспечение внутренней обратной связи, дающей возможность его позиционировать, позволяет применять возвратную пружину с малой величиной собственного фактора устойчивости (или равном нулю, или даже отрицательным), что способствует также снижению крутящего момента и в конце поворота, и тем самым позволяет снизить протекающий через обмотку ток. Всё это способствует повышению энергоэффективности заявляемого устройства.
Величина диаметра боковой поверхности дисков якоря постоянна по всей окружности. Диски якоря выполнены в форме цилиндра. Предложенная форма позволяет повысить технологичность конструкции дисков якоря, обеспечивает упрощение их формы, а значит и уменьшение себестоимости изготовления.
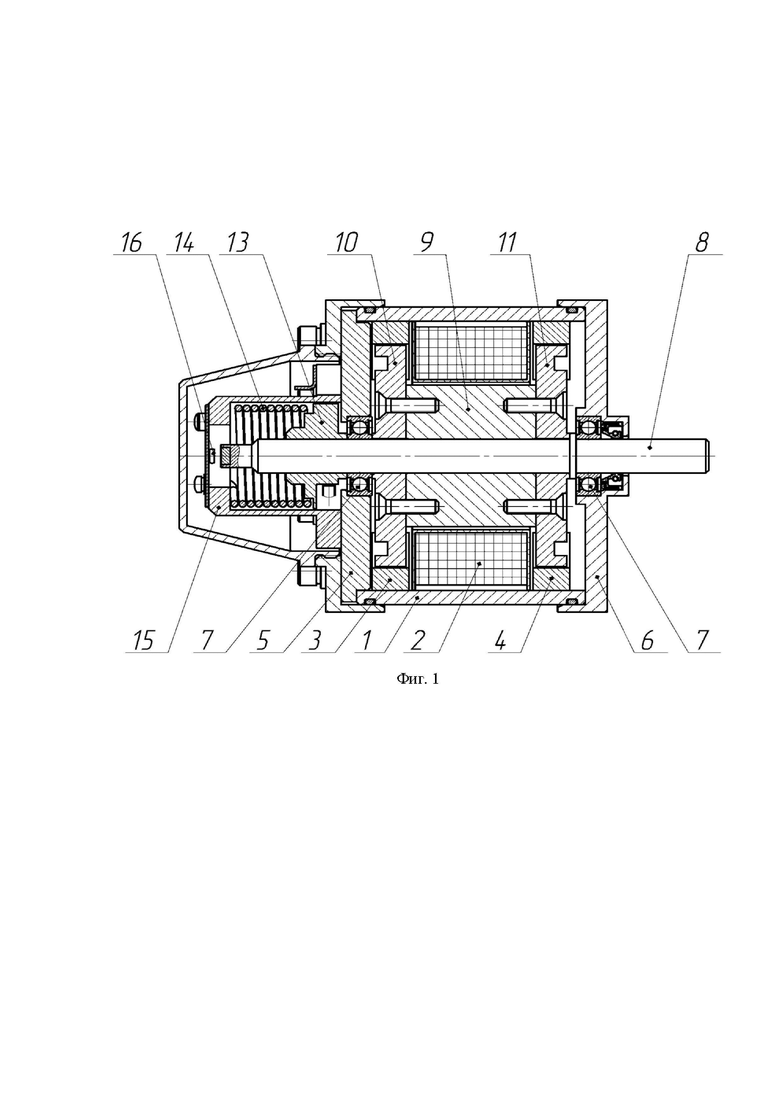
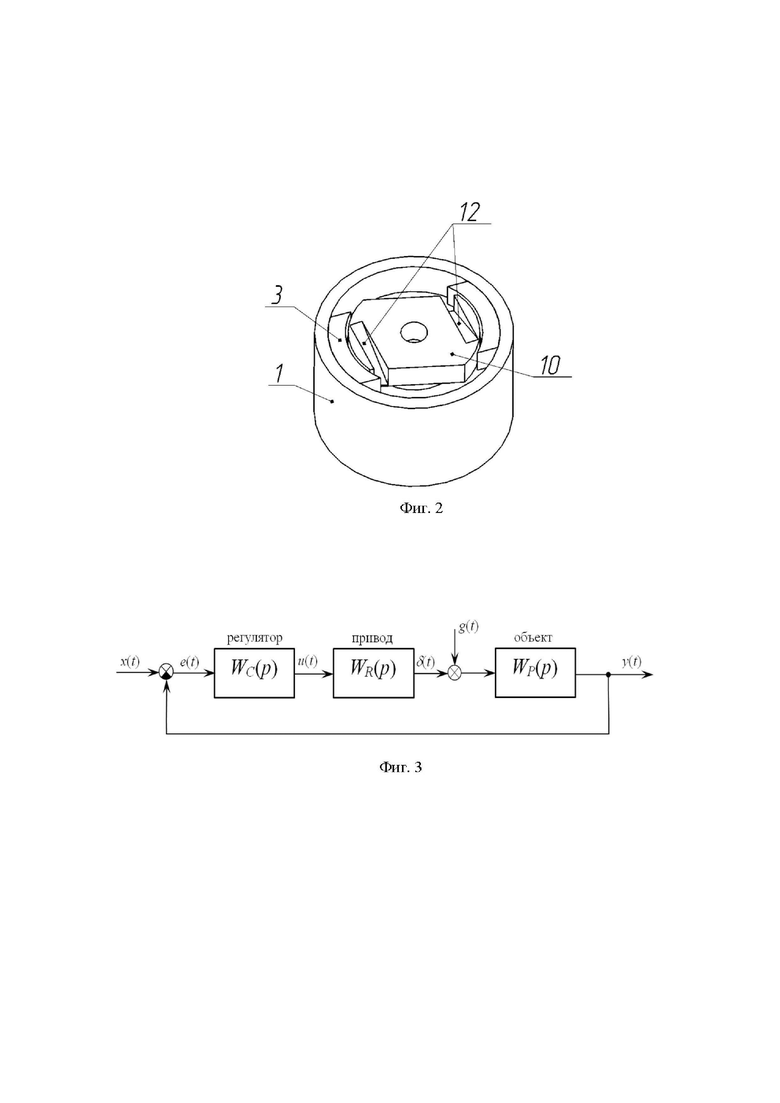
Заявляемое техническое решение иллюстрируется чертежами: на фиг. 1 представлена схема электромагнитного поворотного исполнительного механизма; на фиг. 2 показана расчетная 3D-модель якоря и статора; на фиг. 3 - схема САУ ДВС.
Конструкция электромагнитного поворотного исполнительного механизма (фиг. 1) представляет собой корпус 1 в виде полого цилиндра, в котором неподвижно установлены обмотка 2 электромагнита и составной статор, левая 3 и правая 4 пластины полюсов которого выполнены из магнитомягкого материала, например сплав «неодим-железо-бор». Корпус 1 неподвижно соединен с левой 5 и правой 6 торцовыми крышками, в которых на подшипниках 7 установлен поворотный вал 8 со сборным якорем, состоящим из сердечника 9 и левого 10 и правого 11 торцовых дисков якоря, в каждом из которых выполнены пазы 12 (фиг. 2), используемые в качестве экранов для шунтов. Диски 10, 11 якоря выполнены из магнитно-мягкого материала, (т.е. материала, обладающего высокой магнитной проницаемостью) например электротехническая сталь. На поворотном валу 8 закреплен кулачок 13, как ограничитель возможности поворота вала за пределы необходимого диапазона. Пружина 14 соединена одним концом с кулачком 13, а другим - со стаканом 15 пружины. Стакан 15 пружины неподвижно установлен на левой торцовой крышке 5. На стакане 15 пружины закреплен датчик 16 углового положения поворотного вала 8 и два винта с возможностью контакта с кулачком 13.
Любая САУ ДВС является замкнутой по основному регулируемому параметру (фиг. 3), т.е. по частоте вращения коленчатого вала. На схеме обозначено: x - задающее воздействие (вход); y - регулируемая координата (выход), например частота вращения коленчатого вала ДВС; e - ошибка регулирования; g - возмущающее воздействие; u - управляющее воздействие; WC(p); WR(p); WP(p) - передаточные функции регулятора; привода и объекта управления соответственно.
Датчик 16 углового положения поворотного вала 8 (на фиг. 3 он и обеспечиваемая им информационная связь находятся внутри передаточной функции WR(p)) позволяет обеспечить адекватное соответствие углового положения исполнительного механизма задающему воздействию х, что позволяет достичь оптимального управления в любой непосредственный момент времени любого переходного процесса.
Устройство работает следующим образом. На обмотку 2 электромагнита подают постоянный электрический ток, при этом в элементах якоря, а именно в сердечнике 9, левом 10 и правом 11 торцовых дисках якоря возбуждается магнитное поле, которое взаимодействует с магнитным полем, создаваемым левой 3 и правой 4 пластинами полюсов статора, в результате чего производится поворот якоря совместно с валом 8 и кулачком 13, закручивающим пружину 14. Угол поворота вала 8 контролируется датчиком 16, посредством которого осуществляется обратная связь в САУ. Предельные перемещения вала 8 ограничиваются двумя винтами, установленными на стакане 15.
Серийное изготовление элементов предлагаемого изобретения достижимо для современного уровня металлообрабатывающей и электротехнической промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный электромагнит | 2019 |
|
RU2704962C1 |
| Шаговый электродвигатель | 1981 |
|
SU1023567A1 |
| ПОВОРОТНЫЙ ЭЛЕКТРОМАГНИТ | 1973 |
|
SU374676A1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2398341C1 |
| Магнитоэлектрический моментный двигатель | 1989 |
|
SU1642557A1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ | 2002 |
|
RU2199176C1 |
| Бесконтактная электрическая машина торцового типа | 1988 |
|
SU1539914A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| МУЛЬТИМОДУЛЬНЫЙ БЫСТРОДЕЙСТВУЮЩИЙ ПОЛЯРИЗОВАННЫЙ ДВУХПОЗИЦИОННЫЙ ЭЛЕКТРОМАГНИТ С ПОВОРОТНЫМ ЯКОРЕМ | 2007 |
|
RU2339107C1 |
| Электромагнитный механизм | 1984 |
|
SU1205030A1 |
Изобретение относится к электротехнике и предназначено для использования в качестве пропорционального поворотного исполнительного механизма в системах автоматического управления (САУ) двигателей внутреннего сгорания (ДВС). Технический результат заключается в расширении рабочего диапазона исполнительного механизма, в повышении энергоэффективности. Электромагнитный поворотный исполнительный механизм содержит корпус в виде полого цилиндра, в котором неподвижно установлены обмотка электромагнита и составной статор. Левая и правая пластины полюсов статора выполнены из магнитомягкого материала и размещены с обоих торцов обмотки. Статор неподвижно соединен с двумя торцовыми крышками, в которых на подшипниках установлен поворотный вал со сборным якорем, состоящим из сердечника и левого и правого торцовых дисков якоря, выполненных из магнитопроницаемого материала с возможностью поворота вокруг своей оси. Дополнительно электромагнитный поворотный исполнительный механизм оснащен кулачком, установленным на валу с возможностью угловой настройки с фиксацией его положения с помощью двух винтов. А также поворотной пружиной, жестко связанной одним концом с кулачком, а другим - со стаканом пружины, неподвижно установленным на левой торцовой крышке. Кроме того, оснащен датчиком углового положения вала, жестко установленным на стакане пружины. Оба торцовых диска якоря выполнены в форме цилиндра и оснащены воздушными пазами, формирующими магнитные шунты, при неизменной величине высот как якоря, так и полюса и при неизменной величине воздушного зазора между полюсами статора и якоря. 3 ил.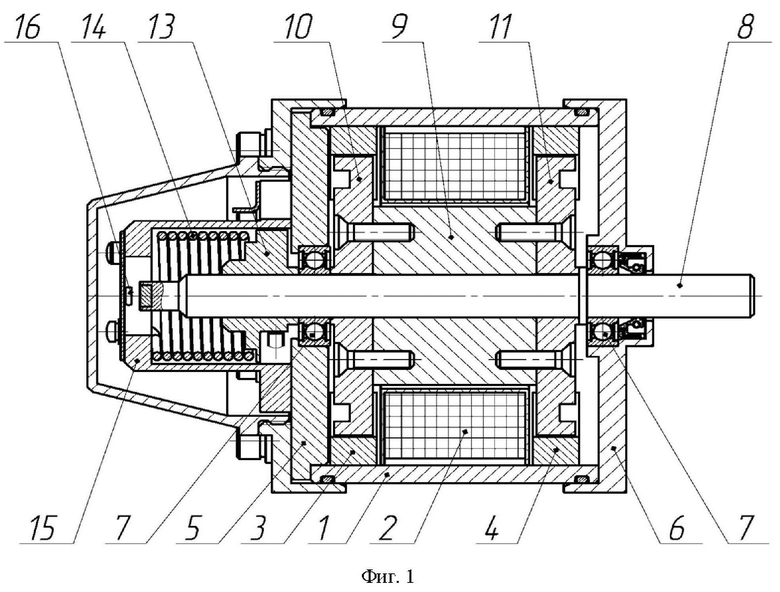
Электромагнитный поворотный исполнительный механизм, содержащий корпус в виде полого цилиндра, в котором неподвижно установлены обмотка электромагнита и составной статор, левая и правая пластины полюсов которого выполнены из магнитомягкого материала и размещены с обоих торцов обмотки, неподвижно соединенный с двумя торцовыми крышками, в которых на подшипниках установлен поворотный вал со сборным якорем, состоящим из сердечника и левого и правого торцовых дисков якоря, выполненных из магнитно-проницаемого материала с возможностью поворота вокруг своей оси, отличающийся тем, что электромагнитный поворотный исполнительный механизм дополнительно оснащен кулачком, установленным на валу с возможностью угловой настройки с фиксацией его положения с помощью двух винтов, поворотной пружиной, жестко связанной одним концом с кулачком, а другим со стаканом пружины, неподвижно установленным на левой торцовой крышке; датчиком углового положения вала, жестко установленным на стакане пружины; причем оба торцовых диска якоря выполнены в форме цилиндра и оснащены воздушными пазами, формирующими магнитные шунты, при неизменной величине высот как якоря, так и полюса и при неизменной величине воздушного зазора между полюсами статора и якоря.
| US 4164722 A, 14.08.1979 | |||
| Электромагнитное исполнительное устройство | 1990 |
|
SU1720099A1 |
| Электромагнитное исполнительное устройство | 1990 |
|
SU1786519A1 |
| CN 105765674 A, 13.07.2016 | |||
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |

