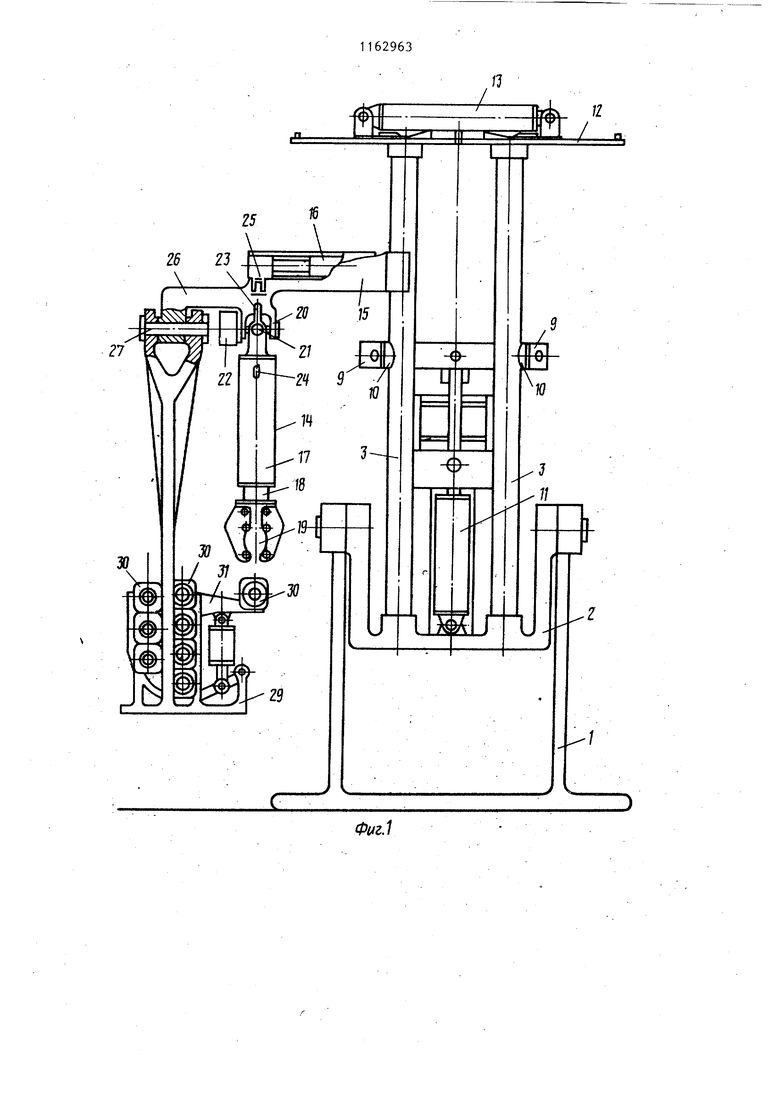
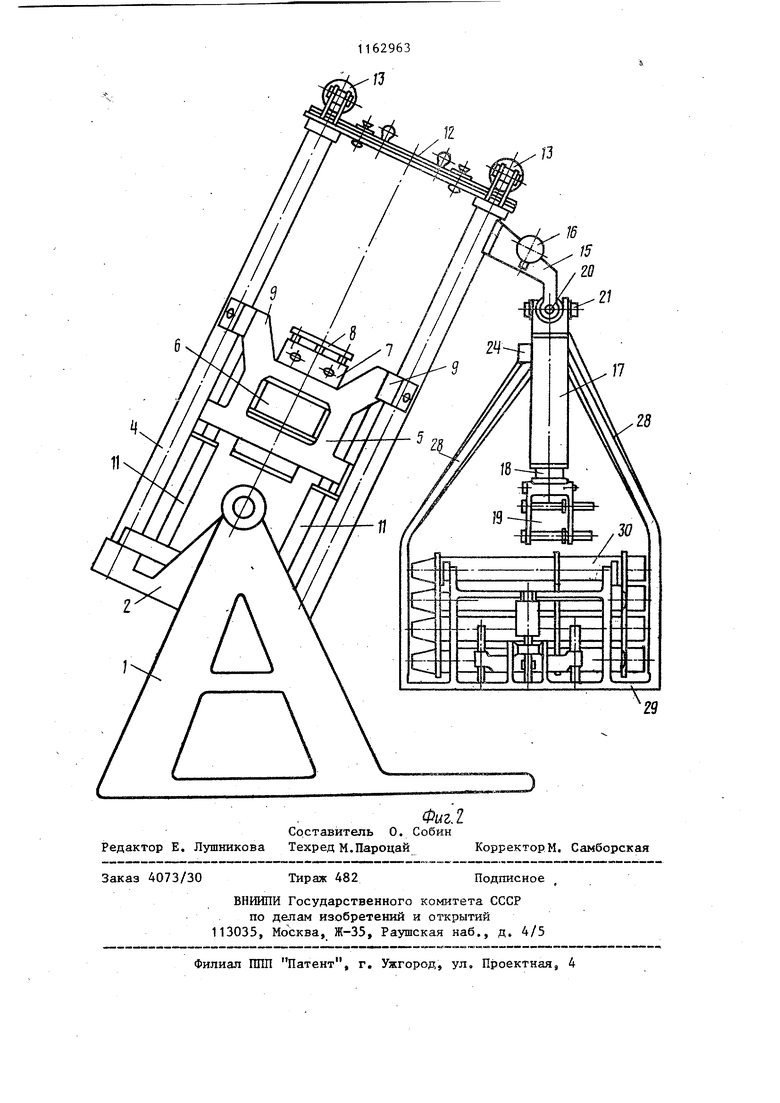
Изобретение относится к горной промышленности, в частности к манипуляторам буровых машин и является усовершенствованием устройства по основному авт.св. f 1016498. Цель изобретения - исключение ручных операций при установке кассе под захватом манипулятора при изменении угла бурения,. На фиг, 1 изображена предлагаема машина} фронтальньм вид| на фиг. 2 то же, вид сбоку. Буросбоечная машина состоит из неподвижного основания 1, к котором шарнирно прикреплена рама 2. На под вижной раме 2 попарно на одинаковом расстоянии друг от друга размещены параллели 3 и 4, на которых подвижн в осевом направлении размеш;ена каретка 5. На каретке 5 неподвижно закреплен привод вращателя 6. На выходном валу, вращателя 6 закреп лен патрон 7 с подвижной в осевом,направлении планшайбой 8. Каретка 5 имеет кронштейны 9, на которых укреплены ролики 10, сопряженные с возможностью перекатывания по параллелям 3 и 4. К каретке 5 и подвижной раме 2 прикреплены гидр цилиндры 11 подачи. На концах параллелей 3 и 4 укреп лен ключ-подхват 12, открывание и за крывание которого осуществляется гидроцилиндром 13. Ключ-подхват 12 необходим для захвата и удержания бурового става на оси бурения в пер од наращивания очередной штанги или vee отвинчивания от него. На параллели 3 закреплен манипулятор 14, состоящий из неподвижного кронштейна 15, на котором размещен гидроцилиндр 16 поворота, и подвижного корпуса 17. Подвижный корпус 1 имеет телескопически вьщвигаемый силовой захват 18 с зевом 19, оснащенным подвижными осями, I Подвижный корпус 17 прикреплен к неподвижному кронштейну 15 посредством крестовины, имекщей взаимно пе пендикулярные оси 20 и 21. Ось 20 размещается в неподвижном кронштейне 15 и соединена с приводом 22 пере мещения в вертикальной плоскости подвижного корпуса 17. Привод подъема Представляет собой, например, гидромотор, К оси 21 шарнирно укреплен подвижный корпус 17. Такое крепление подвижного корпуса 17 обеспечивает 1 3 перемещение во взаимно перпендикулярных плоскостях. Для того, чтобы исключить колебания подвижного корпуса 17 относительно оси 21, в период его поворота приводом 22 перемещения в вертикальной плоскости, на его корпусе выполнен упор 23, который перемещается по пазу, выполненному в неподвижном кронштейне 15. Для поворота подвижного корпуса 17 с захваченной штангой к оси бурения (ось машины) манипулятор снабжен механизмом поворота, которьй состоит из выступа 24, размещенного на корпусе 17, вилки 25 и гидроцилиндра 16. Вилка 25 соединена со штоком гидроцилиндра 16. I На неподвижном кронштейне 15 посредством консоли 26, оси 27 и тяг 28размещена кассета 29 с буровыми штангами 30. Кассета 29 имеет штангоприемник 31, укрепленный к кассете 29таким образом, что при расположении штанги на нем ее ось располагается в горизонтальной плоскости. При этом взаимное положение штанги, расположенной на штангоприемнике 31 и манипулятора 14 с зевом 19 остается неизменным. Горизонтальное положение штанги на штангоприемнике 31 обеспечивается за счет шарнирного крепления кассеты 29 к кронштейну 15 (посредством оси 27) и собственного веса кассеты 29 со штангами 30. Взаимное положение штанги, расположенной на штангоприемнике 31 и манипулятора 14 с зевом 19 обеспечивается; тем, что оси 20 и 27 размещены на кронштейне 15 и консоли 26 соосно (т.е. оси шарнирного соединения тяг размещены в одной плоскости с осями шарнирного крепления подвижного корпуса манипулятора) .. Исходное положение машины. Буровая машина находится на штангоприемнике 31. Подвижный корпус 17 (фактически это рука манипулятора) опущен над штангой 30 таким образом, что его ось перпендикулярна оси штанги 30. Кроме того, необходимо заметить, что обе оси расположены в одной вертикальной плоскости. Зев 19 захвата 18 манипулятора раскрыт. Каретка 5 машины опущена в крайнее нижнее положение. Ключ-подхват 12 закрыт и удерживает буровой став в скважине. Для захвата штанги манипулятором включается гидроцилиндр телескопической выдвижки захвата 18. Зев 19 захвата 18 обхватьшает тело штанги 30, Включается гндроцилиндр зева захвата и захват 18 зажимает штангу Включаетс гидроцилиндр, сокращающий телесколичность манипулятора, штанга 30 взята со штангоприемника 31. Включается привод 22 перемещения в вертикальной плоскости. Штанга 30 ориентируется параллельно оси бурения, но она еще не находится на ней. При окончании перемещения штанги 30 в вертикальной плоскости выступ 24 входит в вилку 25, а упор 23 выходи из паза в кронштейне 15. Для вывода штанги 30 на ось бурения включается гидроцилиндр 16 механизма поворота. Гидроцилиндр 16 сокращаясь, поворачивает подвижный корпус 17 со штангой 30 на ось бурения. Для окончательной доводки штанги 30 на ось бурения включается гидроцилиндр телескопической вьщвижки захвата 18. В конце телескопической вьщвижкн манипулятора штанга выходит на ось бурения. Теперь штанга 30 находится на оси бурения (оси машины) и удерживается в зеве захвата 18 манипулятора 14. Для соединения штанги 30 с патроном 7 включаютс гидроцилиндры подачи 11. Каретка 5, перемещаясь в осевом направлении, проходит патроном 7 к хвостовику штанги 30, находящейся на оси бурения. Включается привод вращателя 6 на вращение. В случае несовпадения граней хвос товика штанги 30 и зева патрона 7 планшайба 8 перемещается в осевом направлении (за счет сжатия упругих элементов, размещенных в корпусе патрона). При ориентировании хвостовика штанги 30 относительно зева патрона 7 он сразу входит в патрон 7 и штанге 30 передается крутящий .момент. При дальнейшем поступательном, с одновременным вращением, движении патрона 7 со штангой 30 происходит его перемещение к штанге 30, котоРУю удерживает ключ-подхват 12. Осевое перемещение щтанги 30 в зеве 19 возможно за счет подвижности его осей. При окончании осевого перемещения штанги 30, находящейся в патроне 7, происходит ее свинчивание со штангой, находящейся в ключе-подхвате 12. При точной ориентации свободного хвостовика штанги 30 относительно оси машины посредством манипулятора захват 18 с зевом 19 выполняпот роль центриру|ощей опоры при соединении новой штанги 30 с буровым ставом. После соединения штанги 30 с патроном 7 и буровым ставом манипулятор занимает первоначальное положение, т.е. зев 19 захвата располагается над новой штангой, находящейся на приемной площадке. Штанга на приемную площадку выдается из кассеты 29 автоматически. Далее происходит раскрытие ключа-подхвата 12, освобождается буровой став; теперь вес бурового става действует через патрон 7 на механизм буровой машины. При б фении каретка 5 с вращателем 6 подается в осевом направлении. При этом перемещении ролики 10 перекатьгааются по параллелям 3 и 4. При окончании цикла бурения на дпину штанги привод вращателя выключается. Включается гидроцилиндр 13 ключаподхвата 12. Последний сводится, захватывая штангу 30. При захвате ., .: штанги 30 ключом-подхватом 12 последний удерживает ее на оси бурения при отводе каретки 5 с вращателем 6 в крайнее заднее положение ц, следовательно, при отсоединении штанги 30 от патрона 7. При установке буровой машины на новое место (бурение новой скважины) ее направляющие 3 и 4 устанавливают вдоль проектной оси бурения. При изменении угла бурения (изменения положения оси машины в пространстве) параллели 3 и 4 ориентируется под необходимым углом бурения. Предлагаемое устройство исключает ручные операции по установке кассеты под захватом манипулятора при изменении угла бурения. Это позволяет увеличить рабочее время, затрачивае. мое на бурение, что увеличивает производительность машины 
| название | год | авторы | номер документа |
|---|---|---|---|
| Буросбоечная машина | 1982 |
|
SU1016498A1 |
| Буровая машина | 1985 |
|
SU1262033A1 |
| Патрон буровой машины | 1981 |
|
SU962608A1 |
| Кассета буросбоечной машины | 1981 |
|
SU960428A1 |
| Патрон бурового станка | 1977 |
|
SU739228A1 |
| Патрон бурового станка | 1980 |
|
SU949172A1 |
| Патрон бурового станка | 1978 |
|
SU785481A1 |
| Устройство для приема и выдачи штанг на буровом станке | 1978 |
|
SU739212A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ВЫДАЧИ БУРОВЫХШТАНГ | 1979 |
|
SU825845A1 |
| Патрон буросбоечной машины | 1980 |
|
SU935609A1 |
БУРОСБОЕЧНАЯ МАШИНА по авт.св. № 1016498, о т л и ч а ющ а я с я тем, что, с целью исключения ручных операций при установке 1сассеты под захватом манипулятора при изменении угла бурения, кронштейн манипуопятора имеет консоль, на которой шарнирно на оси закреплены тяги для кассеты, при этом указанная ось размещена в одной плоскости с одной из осей шарнира кронштейна манипулятора.
| Буросбоечная машина | 1982 |
|
SU1016498A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
