Изобретение относится к области горной промышленности, в частности к буровым машинам. Целью изобретения является уменьшение времени на позиционирование зева манипулятора над штангой путем исключения колебаний кассеты. На фиг. 1 изображена машина, вид спереди; на фиг. 2 - вид А на фиг. 1. Буровая машина состоит из неподвижного основания 1, к которому шарнирно прикреплена рама 2. На подвижной раме 2 попарно на одинаковом расстоянии друг от друга размешены параллели 3 и 4, на которых подвижно в осевом направлении раз мешена каретка 5. На каретке 5 неподвижно закреплен привод 6 врашателя. На выходном валу врашателя закреплен патрон 7 с подвижной в осевом направлении планшайбой 8. Каретка 5 имеет кронштейны 9, на которых укреплены ролики 10, сопряженные с возможностью перекатывания по параллелям 3 и 4. К каретке 5 и подвижной раме 2 укреплены гидроцилиндры 11 подачи. На концах параллелей 3 и 4 укреплен ключподхват 12. Открывание и закрывание ключа-подхвата 12 осуществляется гидроцилиндрами 13. Ключ-подхват 12 необходим для захвата и удержания бурового става на оси бурения в период наращивания очередной штанги или ее отвинчивании от него. На параллели 3 закреплен манипулятор 14, состоящий из неподвижного кронштейна 15, на котором размещен гидроцилиндр 16 поворота, и подвижного корпуса 17. Подвижный корпус 17 имеет телескопически выдвигаемый силовой захват 18 с зевом 19, оснащенным подвижными осями. Подвижный корпус 17 прикреплен к неподвижному кронштейну 15 посредством крестовины, имеющей взаимно перпендикулярные оси 20 и 21. Ось 20 размещена в неподвижном кронштейне 15 и соединена с приводом 22 перемещения в вертикальной плоскости подвижного корпуса 17. Привод подъема представляет собой, например, гидромотор. К оси 21 шарнирно укреплен подвижный корпус 17. Такое крепление корпуса 17 обеспечивает его перемещение во взаимноперпендикулярных плоскостях. Для того, чтобы исключить колебания неподвижного корпуса 17 относительно оси 21 в период его поворота приводом 22 и перемещения в вертикальной плоскости, на его корпусе выполнен упор 23, который перемещается по пазу, выполненному в неподвижном кронштейне 15. Для поворота подвижного корпуса 17 с захваченной штангой к оси бурения (ось машины) манипулятор снабжен механизмом поворота. Механизм поворота состоит из выступа 24, размещенного на корпусе 17, вилки 25 и гидроцилиндра 16. Вилка 25 соединена со штоком гидроцилиндра 16. На неподвижном кронштейне 15 к консоли 26 осью 27 шарнирно укреплена обойма 28. К обойме 28 посредством тяг 29 прикреплена кассета 30 с буровыми штангами 31. С обоймой 28 подвижно сопряжена стойка 32, которая кинематически (подвижно) связана с основанием машины. Конкретная связь стойки 32 с основанием 1 может быть осушествлена муфтой 23, подвижно сопряженной с направляющей 34, укрепленной на основании 1 (взаимосвязь стойки 32 с основанием 1 может быть выполнена, например, посредством крепления стойки в основание соединением типа «ласточкин хвост). В средней части стойки 32 размеш,ен ползун 35, шарнирно соединенный посредством кулисы 36 и дополнительного кронштейна 37 с параллелью 3, на которой размещен кронштейн 15. Детали 29, 32, 33, 34, 35 и 36 образуют механизм фиксации кассеты 30. Исходное положение буровой машины. Гидроцилиндры 11 подачи сокращены. Зев 19 манипулятора 14 размещен над штаной 31, лежащей на штангоприемниках кассеты 30. Машина при бурении прямым ходом работает следующим образом. Включается гидроцилиндр выдвижения захвата 18. Зев 19 захвата 18 охватывает тело штанги 31. Включается гидроцилиндр зева захвата и захват 18 зажимает штангу. Включается гидроцилиндр, сокращающий телескопичность манипулятора, штанга 31 захвачена (взята) со щтангоприемника кассеты 30. Включается привод 22 перемещения .манипулятора в вертикальной плоскости. Штанга 31 ориентируется параллельно оси бурения, но она еще не находится на ней. При окончании перемещения штанги 31 в вертикальной плоскости выступ 24 входит в вилку 25, а упор 23 выходит из паза в кронштейне 15. Для выхода штанги 31 на ось бурения включается гидроцилиндр 16 механизма поворота. Гидроцилиндр 16, сокращаясь, поворачивает подвижный корпус 17 со штангой 31 на ось бурения. Для окончательной доводки штанги 31 на ось бурения включается гидроцилиндр телескопической выдвижки захвата 18. В конце выдвижки манипулятора штанга выйдет на ось бурения. Патрон 7 подается гидроцилиндрами подачи в осевом направлении, захватывает щтангу. Манипулятор отводится от щтанги. Вновь включаются гидроцилиндры подачи. Патрон с зажатой штангой подается в осевом направлении. Если необходимо нарастить очередную штангу, то первая штанга устанавливается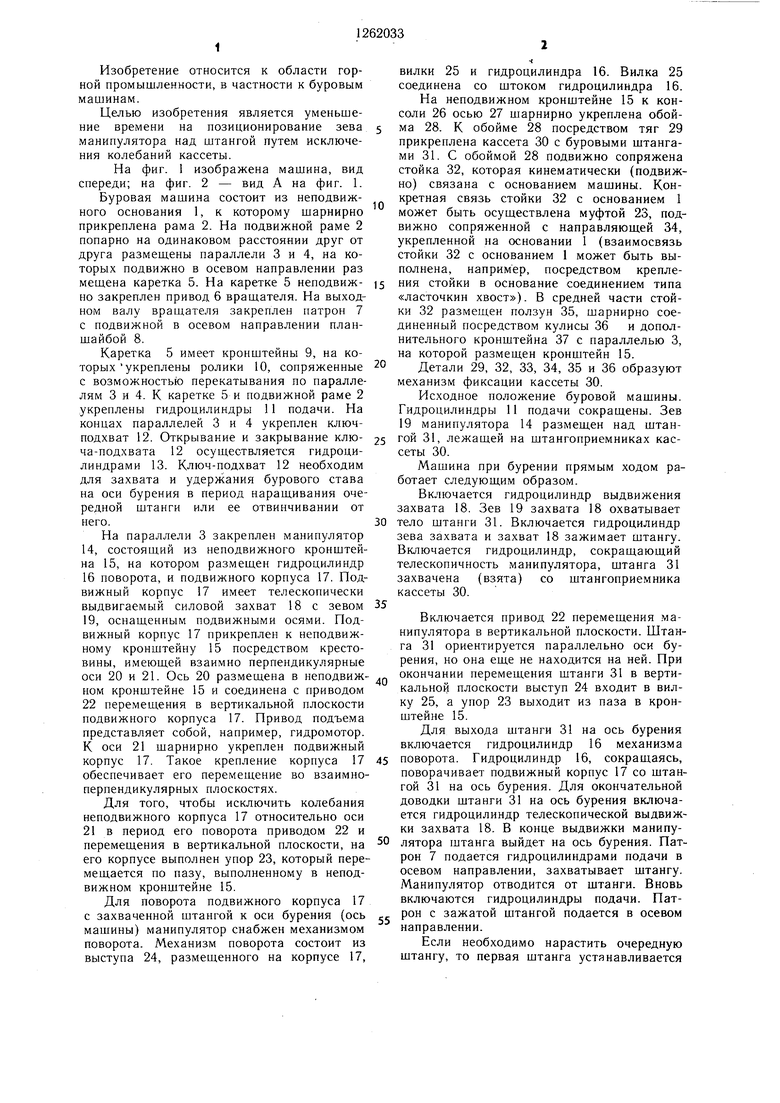

| название | год | авторы | номер документа |
|---|---|---|---|
| Буросбоечная машина | 1984 |
|
SU1162963A2 |
| Буросбоечная машина | 1982 |
|
SU1016498A1 |
| Кассета буросбоечной машины | 1981 |
|
SU960428A1 |
| Устройство для приема и выдачи штанг на буровом станке | 1978 |
|
SU739212A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ВЫДАЧИ БУРОВЫХШТАНГ | 1979 |
|
SU825845A1 |
| Захват манипулятора | 1979 |
|
SU848620A1 |
| Патрон бурового станка | 1980 |
|
SU949172A1 |
| Устройство для хранения и подачи штанг | 1985 |
|
SU1257160A1 |
| М. С. СЬвич, г.КГ.ЛДСТЕКАЛ. Д. Табачников, Н. И. Чугунов, Л. Г. Штрахман, М. Д. Щеглфви Н. Д. Якобсон | 1969 |
|
SU250811A1 |
| БУРОВОЙ СТАНОК | 1967 |
|
SU194698A1 |

| Составное колесо для беззазорной зубчатой передачи | 1981 |
|
SU1016598A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Буросбоечная машина | 1984 |
|
SU1162963A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
