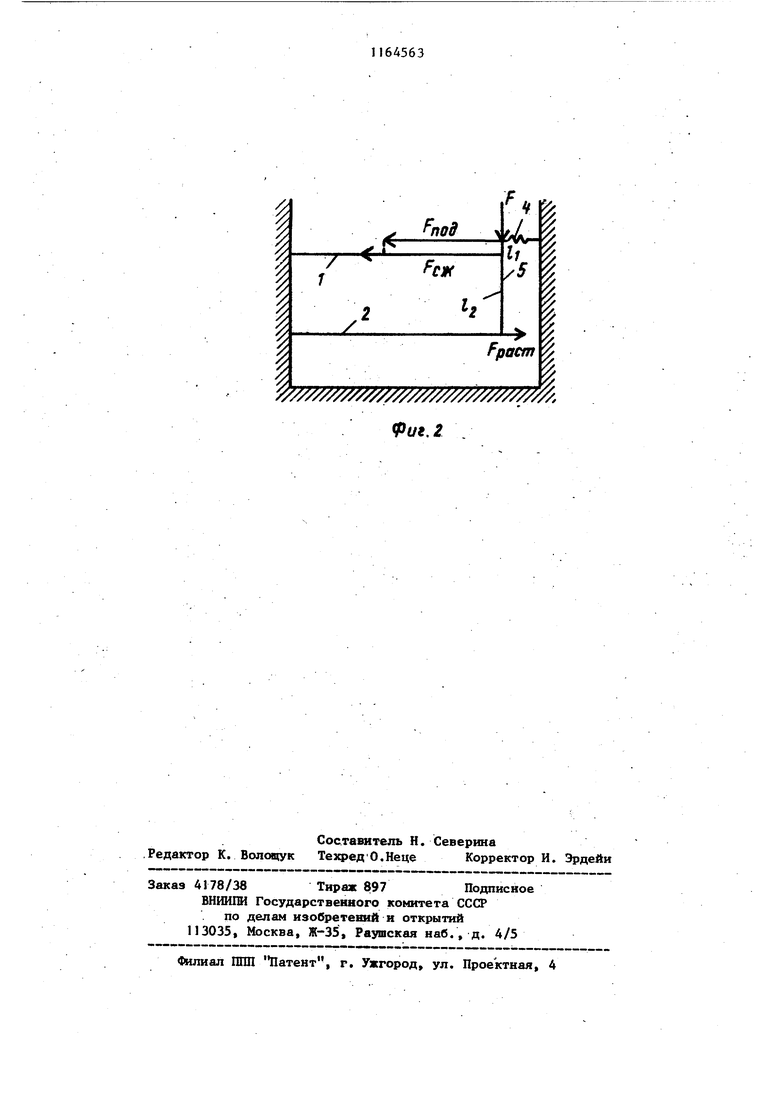
11 Изобретение относится к измерител ной технике, и может быть использовано для точного измерения статических усилий и давлений в широких динамических .диапазонах. Известны дифференциальные пьезоэлектрические датчики статистической силы, содержащие два пьезорезонатора консольно закрепленные в металлическом корпусе иСоединенные на свободных концах металлической прокладкой ij. Недостаток известньпс дифференциальных пьезоэлектрических датчиков статической силы состоит в узком динамическом диапазоне характеристики преобразования, приче расширение динамического диапазона и мерений в таких устройствах невозмож но из-за ограниченности предельно допустимых усилий растяжения 6 ро(ст пьезорезонаторов, которые в 24 раза меньше, чем допустимые урилия сжа. ТИЯ.. . Наиболее близким к изобретению яв ляется дифференциальный пьезоэлектрический датчик силы, содержащий дв консольно закрепленных в корпусе пьезорезонатора и пружину Czl, В отличие от аналога, где достижимый динамический диапазон характеРИСТИ1СИ преобразования ограничен величиной допустимого усилия растяжени рдр пьезорезонатрров, в устройствепротЬтипе благодаря использованию одновременного поджатия пьезорезонат ров посредством пружины удается расширить диапазон воздействующих усилий до . Однако предельно допустимые усилия сжатия пьезорезонато ров ( составляет з с учетом того, что в консольной конструкции при воздействии измеряемой силы F один из резонаторов подвержен растяжению, а второй сжатию, потенциально возможный.диапазон измеряемых усилий составляет 25d Таким образом. известные конструкции дифференциаль.ных пьезоэлектрических датчиков ста тической силы, вю1ючая и датчики ста тйческой силь} (датчик-прототип), не используют и половины возможностей по измерению статической усилий, которые может обеспечить пьезокварц, что ограничивает такжедостижимую точность измерений и динамический диапазон контролируемых статических сил. 3 Цель изобретения - расширение диапазона измерений. Цель достигается тем, что в дифференциальный пьезоэлектрический датчик силы, содержащий два консольно закрепленных в корпусе пьезорезонатора и пружину, введен рычаг, связанный одним концом со свободными концами параллельно расположенных пьезорезонаторов, а другим концом - с пружиной, закрепленной в корпусе параллельно пье.зорезонаторам, при этом расстояние от точки закрепления пружины до пьезорезонатора и между пьезорезонаторами выбрано из соотношения 1:23. На фиг. 1 представлена схема дифференциального пьезоэлектрического датчика силы; на фиг. 2 - эпюра действующих сил. Датчик содержит два пьезорезонатора 1 и 2, консольно закрепленные в металлическом корпусе 3 параллельно продольной оси пружины поджатия 4. Пьезорезонаторы на свободных концах соединены металлической прокладкой 5, выполненной в виде рычага, между коротким концом которого и корпусом установлена пружина поджатия. В-корпусе датчика выполнено отверстие 6, через которое .в торец металлической прокладки, соединяющей пьезорезонаторы, воздействует измеряемая статическая сила F. Кроме того, электроды 7 пьезорезонаторов подключены, к автогенераторам 8 и 9, которые нагружены ha входа смесителя 10, связанного через фильтр нижних частот 11 с выходом 12 устройства, а пружина поджатия снабжена устройством регулировки поджатия, содержащим винт 13 и шарик 14. Дифференциальный пьезоэлектрический датчик статической силы работает следукщим образом. Как видно из эпюры действующих в :конструкции датчика сил (фиг. 2), при равенстве нулю измеряемой статической силы F состояниепьезорезонатором i и 2 предлагаемого датчика полностью определяется выбором силы поджатия Р,,. под пружины 4, задаваемой винтом 13 посредством шарика 14, и соотношением длин плеч рычага-прокладки 5, связывающей Пьезорезонаторы 1 и 2 на свободных концах. Поскольку опорой рычагапрокпадки 5 служит пьезорезонатор 1, расположенный со стороны короткого плеча 2 этого рычага, на которое и воздействует поджимающая сила F , что согласно правилу рычага в соответствии с эпюрой, приведенной на фкг. 2, можно записать следующие со отношения: Ррс( F Е ПОА 1 FnoA(e,+ ej)F, е. где fnof, сила, поджимающая пружину 4; сила, растягивающая пьез резонатор 2 посредством длинного конца 1 рычага сила, сжиманлцая пьезорез натор 1; . 8, - длина короткого конца ры чага, 1 - длина длинного конца рыч га. ; После несложных преобразований и выражений (1) и (2) получаем F - -1 F . ПОЛ Е раст с в рчст X Так как прикладываемое к пьезокварцу максимально допустимое усили растяжения в 24 раза меньше пре дельно допустимого усилия сжатия 6.| то очевидно, что величина выражении (4) также должна равняться 24, а соотношение плеч рычага-прокладки 5 будет равно . При этом из вы ражения (3) видно, что для задания в пьезорезонаторах 1 и 2 максимально допустимых усилий 6 соответственно, прикладываемая к под жимающей пружине сила F должна иметь величину 23 Ераст что соответствует . ; Таки1, образом, при l/23 и выборе поджимающей силы ,,, равной 23 Fpacr где предельно допус тимая сила растяжения пьезорезонаторов пьезорезонатор 1 будет испытывать максимально допустимое для него усилие сжатия &| , а пьезо резонатор 2 при этом будет испытывать предельно допустимое для него усилие растяжения Так как пьезорезонаторы 1 и 2 . . включены своими электродами 7 в схем автогенераторов 8 и 9 соответственно, то на выходе первого из автогене раторов 8 с учетом поджатия пьезоре- зонатора 1 сжимающим усилием 6 получим максимальное значение генерируемой этим автогенератором частоты fiTO:,, а на выходе второго автогенератора 9 с учетом приложенного к пьезорезонатору 2 максим1ально допустимого растягиванщего усилия с(ст получим минимальное значение его частоты Р воздействии измеряемой силы F пьезорезонаг тор i будет подвергаться растяжению (df /dPiO), а пьезорезонатор 2, наоборот, точно такому же по величине сжатию(df2./dF О). Тогда необходимым условием правильной работы предлагаемого датчика является выполнение неравенства f ..„ , что нетрудно обеспечить выбором начальных значений собственных частот f и foj пьезорезонаторов и 2. При воздействии измеряемой силы F, измеряющейся от своего минимального значения 0 до максимального , , пружина поджатия 4 вследствие малой поперечной жесткости не оказывает влияния на результаты измерений, а максимальное значение измеряемой силы определяется таким состоянием датчика в условиях воздействия F, когда пьезорезонаторы 1 и 2 с точки зрения воздействующих на них усилий 4 с. и 6ро,сткак бы меняются местами. Если в исходном состоянии (при ) в результате выполнения прокладки 5 в виде рычага с определенным соотношением плеч (1/23) и введения силы поджатия , к пьезорезонатору 1 приложено максимальное . допустимое усилие сжатия tf 244|j, а к пьезорезонатору 2 максимально допустимое усилие растяжения . Сз f то при максимально р«СТ допустимом нагружении предпагаемого датчика ( , благодаря его новым конструктивным особенностям по сравнению с Устройством-прототипом и поскольку пьезорезонатор 1 посредством прикладываемой силы F растягивается, а пьезорезонатор 2 сжимается, оказывается, что к пьезорезонатору 1 уже приложено максимально допустимое усилие растяжения ь, а к пьезорезонатору 2 наоборот максимально допустимое усилие сжатия ( 24 бД.,;.. . В результате диапазоны прикладьшаемых к пьезорезонаторам I и 2 усилий в процесса изменения измеряемой с.илы от Ff,0 до составляют максимально достижимую для пьезокварца величину И изменяются для пьезорезо1 от + 24 (- до наторарс(ст J а. для пьезорезонатора 2 наоборот от - dcT ДО + 24ёраог Как видно, диапазон прикладываем к пьезорезонаторам 1 и 2.усилий в предлагаемом устройстве в 25 раз бо ше, чем в устройстве-аналоге и приб лизительно в 2 раза больше, чем в устройстве-прототипе. При этом, поскольку относительные изменения час тот, пьезорезонаторов определяются . уровнями создаваемых в них напряжений, в соответствующее число раз больше максимальная статическая сила F и полезная девиация информационной разности частот f и f, кото рая выделяется посредством цепи, со держащей последовательно соединенные смеситель 10 и фильтр нижних частот 11, и поступает на выход 12 устройства. Эта разность частот f f, формируемых автогенераторами 8 и 9 и поступающих на входы смесит ля 10, изменяется от своего минимал кого значения (при ) 4 f, f гтлпД.- максимальногоj равного fmc,x f-imin , причем величина F для предлагаемого датчика примерно в 2 раза больше, чем для прототипа. В дифференциальном пьезоэлектрическом датчике статической силы приблизительно в 2 раза по сравнени с прототипом увеличен динамический диапазон констролируемой статическо силы за счет более полного использо вания физико-механических свойств материала пьезокварца, из которого выполнены чувствительные злементы датчики-пьезорезонаторы 1 и 2. В ре зультате при сравнительно несложных конструктивных изменениях известных датчиков удается значительно расширить их возможности, что обеспечива сокращение номенклатуры выпускаемых промьшшенностью дифференциальных пьезоэлектрических датчиков статической силы. Расширение динамического диапазо на измеряемз1х статических сил неизбежно ведет и к соответствующему повышению точности измерений. Это объясняется тем, что при одинаковых максималыи 1х динамических диапазонах контролируемых статических сил в предлагаемом устройстве и прототипе Б последнем необходимо более чем в 2 раза повысить механическую прочность чувствительных злементовпьезорезонаторов например за счет соответствующего увеличения их толщины, без чего они просто разрушатся. Однако это приведет к резкому снижению относительных изменений частоты (чувствительности) и, следовательно, к увеличению влияния на точность измерений погрешности нуля датчика. Б случае же, когда в предлагаемом датчике и прототипе чувствительность, а значит и точность измерений будут обеспечены только в диапазоне воздействующих сил от Fm{r ДО тсх Fmc(x/2. на другую половину динамического диапазона контролируемых сил от до ,, следует брать датчик-прототип уже с более толстыми (в два раза), а значит и менее чувствительными резонаторами. Очевидно, чтоэто помимо расширения номенклатуры датчиков приводит к более чем двукратному ухудшению точности измерений, так как повьш1ается вклад в результаты измерений погрешности нуля характеристики преобразования из-за соответствующего снижения чувствительности пьезорезонаторов. Следовательно, если устройство-прототип обеспечивает максимально достижимую точность измерений в динамическом диапазоне измеряемых статических сил от /2 - 2&, до примерно ак - расП (предлагаемый), то дифференциальный датчик статической силы обеспечивает такую же точность уже в приблизительно в два раза расширенном диапазоне контролируемых статичес25 г . ких сил от F. О до 5.„в.-ruin -- тих ЧТО эквивалентно приблизительно двукратному повышению точности измерений в диапазоне контролируемых усилий. Предлагаемый датчик наряду с расширением технических возможностей дифференциальных датчиков статической силы обеспечивает снижение их номенклатуры и повышение точности измерений.


| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный пьезоэлектрический преобразователь | 1981 |
|
SU979902A1 |
| Дифференциальный датчик давления с частотным выходом | 1989 |
|
SU1749734A1 |
| Устройство для измерения давления | 1990 |
|
SU1778572A1 |
| Дифференциальный угловой пьезоэлектрический акселерометр | 1983 |
|
SU1136084A1 |
| Дифференциальный пьезоэлектрический преобразователь | 1981 |
|
SU979903A1 |
| Устройство для измерения температуры | 1984 |
|
SU1229603A1 |
| Дифференциальный пьезоэлектрическийпРЕОбРАзОВАТЕль | 1979 |
|
SU851130A1 |
| Дефференциальный пьезоэлектрический преобразователь | 1984 |
|
SU1232964A1 |
| Датчик силы | 1981 |
|
SU976310A1 |
| Кварцевый силочувствительный элемент | 1983 |
|
SU1117466A1 |
ДИФФЕРЕНЦИАЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК СИЛЫ, содержащий два консольно закрепленнь:х в корпусе пьезорезонатора и пружину, отличающийся тем, что, с целью расширения диапазона измерения, в него введен рычаг, связанный одним концом со свободными концами параллельно расположенных пьезорезонаторов а другим концом - с пружиной, закрепленной в корпусе параллельно пьезоре-. зонаторам, при этом расстояние от точки закрепления пружины до пьезорезонатора и между пьезорезонаторами- выбрано иЬ соотношения 1:23. (Л СД О9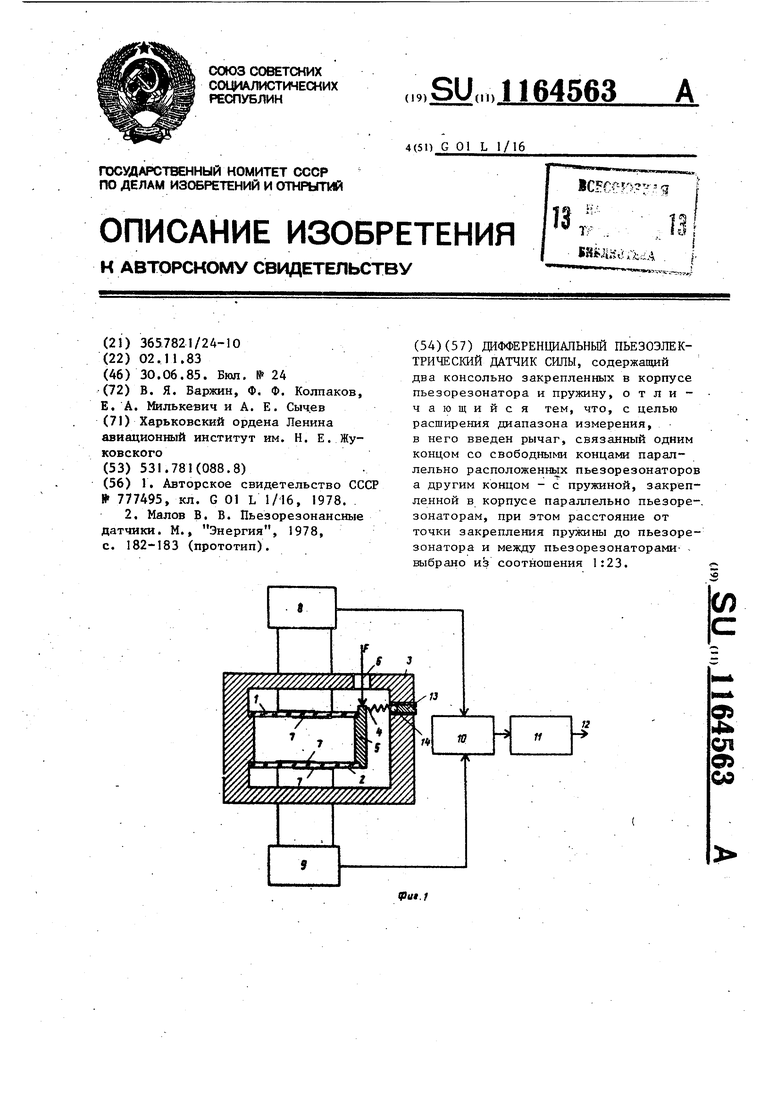
| Г | |||
| Устройство для измерения механических величин | 1979 |
|
SU777495A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Налов В | |||
| В | |||
| Пьезорезонансные датчики | |||
| М., Энергия, 1978, с | |||
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
