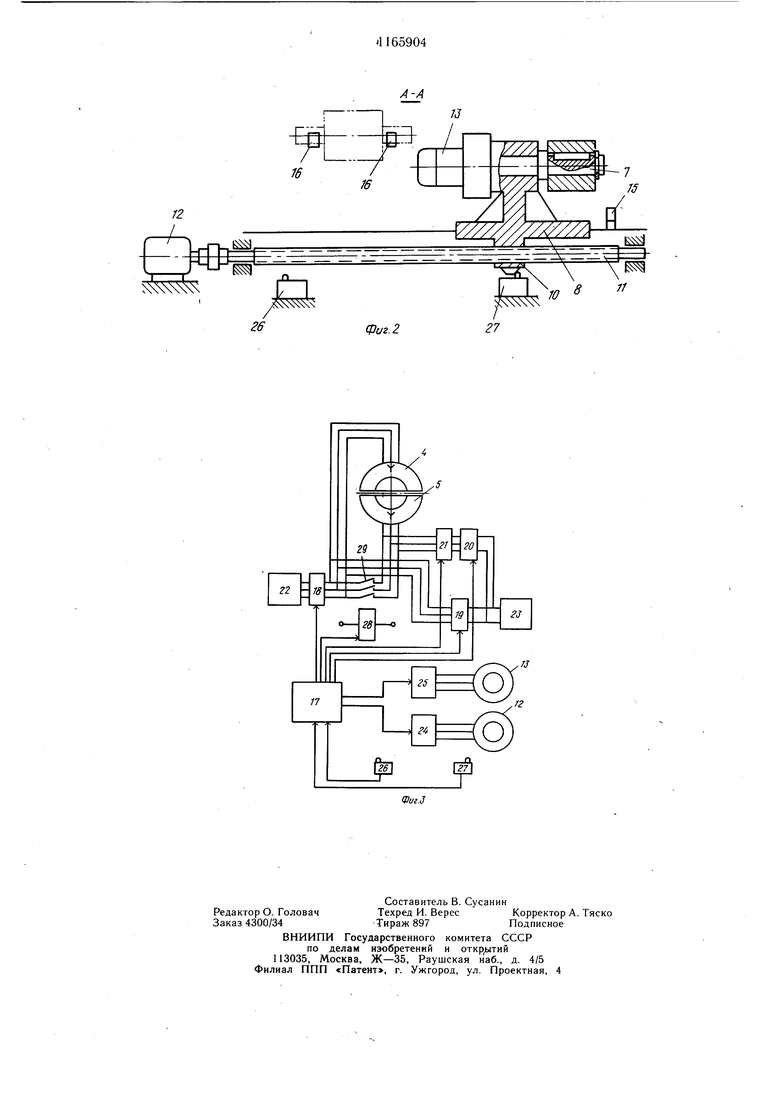
Изобретение относится к балансировочной технике. и может быть использовано в машиностроении для установки изделия на исходную позицию для обработки и приведения его во вращение. По основному авторскому свидетельству СССР № 947661 известен бесконтактный электромагнитный привод роторов, содержащий основание, размещенные на нем опоры для ротора, статор и источник переменного тока, подключенный к обмоткам статора, который выполнен в виде рычажного дугового захвата, ось поворота которого закреплена на основании, а привод снабжен источником постоянного тока, также подключенным к обмоткам статора, и блокам управления положением захвата 1. Недостатком известного бесконтактного электромагнитного привода роторов является невысокая точность балансировки, поскольку статор создает магнитное тяжение на ротор, направленное вверх и, таким образом, искажает показания датчиков за счет уменьшения фактического веса ротора. Цель изобретения - повышение точности балансировки. Постановленная цель достигается тем, что бесконтактный электромагнитный привод роторов, содержащий основание, размещенные на нем опоры для ротора, статор и источник переменного тока, подключенный к обмоткам статора, который выполнен в виде рычажного дугового захвата, ось поворота которого закреплена на основании, а привод снабжен источником постоянного тока, также подключенный к обмоткам статора, и блоком управления положением захвата, снабжен дополнительным дуговым статором, установленным на основании диаметрально противоположно основному и подключенным к источникам переменного и постоянного токов. На фиг. 1 изображен бесконтактный электромагнитный привод роторов; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - блок-схема управления приводом. Бесконтактный электромагнитный привод роторов содержит основание 1, размещенные на нем опоры 2 для ротора 3, статоры 4 и 5. Статор 5 установлен на основании 1 неподвижно, а статор 4 закреплен на конце рычага 6, ось 7 поворота которого закреплена на каретке 8, установленной на параллельных оси ротора 3 направляющих 9, установленных на основании 1. Гайка 10 каретки 8 кинематически связана с ходовым цинтом 11, соединенным с двигателем 12. Ось 7 связана с мотор-редуктором 13. Статоры 4 и 5 имеют равный угол охвата ротора 3 и одинаковый по отношению к нему зазор в рабочем положении, который для статора 4 определяется упором 14. Напротив статора 5 установлен разгрузочный лоток 15, а со смещением параллельно оси ротора 3 - загрузочный лоток 16. Система управления приводом состоит из блока 17 управления тиристорных ключей 18-20, блока 21 регулирования напряжения, источников 22 и 23 питания соответственно переменного и постоянного токов, блоков 24 и 25 коммутации двигателей 12 и 13, конечных выключателей 26 и 27 и катушки 28 промежуточного реле с контактами 29. Бесконтактный электромагнитный привод роторов работает следующим образом. В исходном положении каретка 8 находится напротив загрузочного лотка 16, о чем в блок 17 управления подает сигнал конечный выключатель 26, на который воздействует гайка 10. По команде с блока 17 блок 25 включает мотор-редуктор 13, который подводит снизу под поступивщий на лоток 16 ротор 3 статор 4. Ключ 18 включает постоянное напряжение на статор 4 и ротор 3 притягивается к нему. Затем мотор-редуктор 13 поворачивает рычаг 6 на угол 30-45° так, что статор 4 не зацепляется за лоток 16. В этом положении блок 24 включает двигатель 12, который перемещает каретку 8 до получения сигнала с конечного выключателя 27, когда каретка 8 устанавливается напротив статора 5. Далее следует команда с блока 17 управления на блок 24, и мотор-редуктор 13 устанавливает статор 4 в рабочее положение. Снимается ключом 19 постоянное напряжение с обмотки статора 4, и ротор 3 ложится на опоры 2. Далее блок 17управления включает катушку 2,8 реле, которое замыкает контакты 29, аключ 18 подает переменное напряжение на оба статора 4 и 5. Возникает вращающееся магнитное поле, раскручивающее ротор 3 до нужной скорости. После проведения балансировки ротора 3 блок 17 выключает ключ 18и катушку 28, а включает ключи 19 и 20, подающие на статоры 4 и 5 постоянное напряжение. Происходит динамическое торможение вращающегося ротора 3. После этого с помощью блока 21 плавно снижается напряжение в статоре 5, и ротор 3 притягивается к статору 4. Затем поворотом рычага 6 ротор 3 укладывается на разгрузочный лоток 15. Снимается постоянное напряжение со статора 4, и ротор 3 скатывается по лотку 15. После этого блок 17 через блок 24 включает двигатель 12, который перемещает каретку 8 в исходное положение напротив загрузочного лотка 16, о чем сигнализирует конечный выключатель 26. Затем цикл повторяется. Благодаря установке дополнительного дугового статора силы магнитного тяжения уравновещиваются. Балансировка ротора осуществляется при нормальном действии на него только собственной силы, т. е. балансировка проводится в условиях, аналогичных работе ротора в мащине, что позволяет повысить точность балансировки роторов.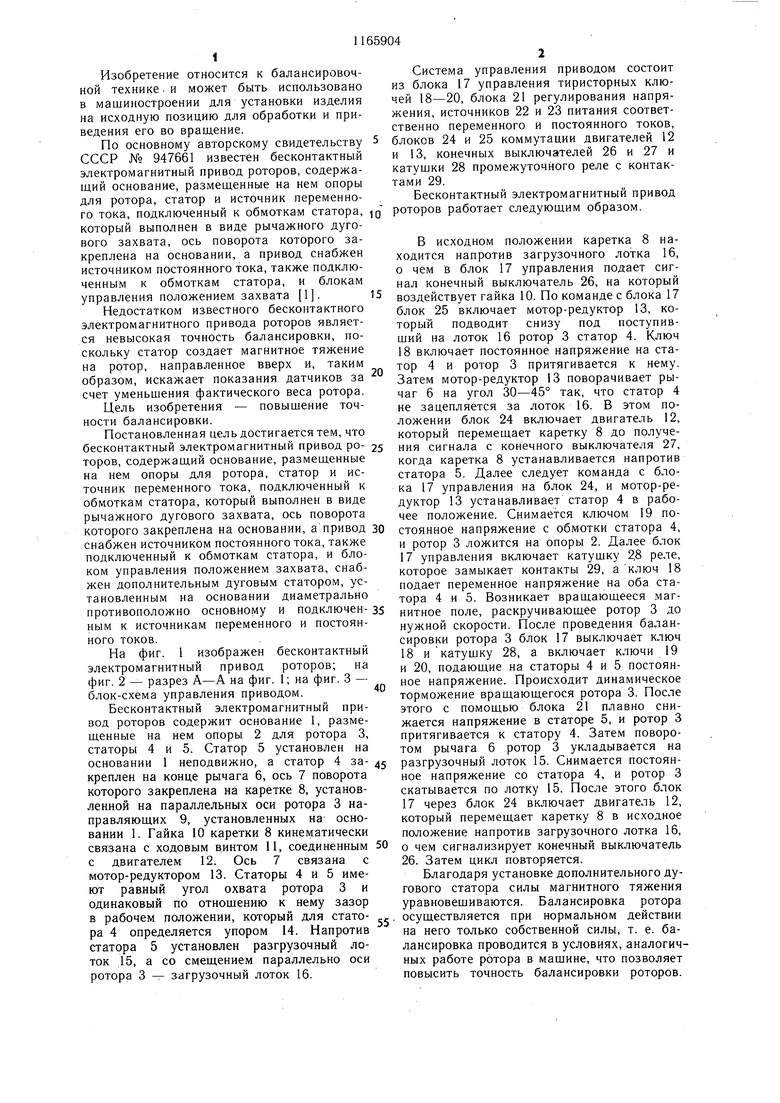
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный электромагнитный привод роторов | 1981 |
|
SU947661A1 |
| Устройство для фазирования синхронных бесконтактных генераторов | 1987 |
|
SU1467669A1 |
| Стартер-генератор | 1981 |
|
SU1050056A1 |
| Устройство для пуска синхронной машины | 1986 |
|
SU1394381A1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (ВАРИАНТЫ) | 2007 |
|
RU2340994C1 |
| ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2290328C1 |
| ИМПУЛЬСНО-ИНЕРЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285997C1 |
| Устройство для моделирования силы резания | 1976 |
|
SU622116A1 |
| МОТОР-КОЛЕСО | 1998 |
|
RU2156191C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
БЕСКОНТАКТНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД РОТОРОВ по авт. св. № 947661, отличающийсятем, что, с целью повышения точности балансировки, он снабжен дополнительным дуговым статором, установленным на основании диаметрально противоположно основному и подключенным к источникам переменного и постоянного токов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный электромагнитный привод роторов | 1981 |
|
SU947661A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
