Изобретение относится к балансировочной технике и может быть исполь aoeeiHO в машиностроении для установки изделия на исходную позицию для обработкии приведения его во вращение.
Известен бесконтактный электромагнитный привод, содержащий основание, размещенные на нем опоры для ротора, статор и источник переменного тока. Статор выполнен развернутым и установлен параллельно плоскости колебаний ротора с возможностью регулировки зазора между ротором и статором ll .
Наиболее близким по технической сущности к изобретению является бесконтактный электромагнитный привод роторов, содержащий основание, размещенные на нем опоры для ротора, статор и источник переменного тока, подключенный к обмоткам статора. При включении питания на обмотки статора, выполненного в виде .кольца с полюсными наконечниками, на которых размещены обмотки, возникает вращающееся магнитное поле, приводящее во вращение ротор с форсированным разгоном. После этого производят балансировку ротора з. .
Недостатком приводов является не- , возможность снятия роторов с балансировочной позиции по окончании балансировного цикла, что снижает функциональные возможности.
Цель изобретения - расширение функционсшьных возможностей путем использования привода в качестве манипулятора.
Поставленная цель достигается тем, что в бесконтактном электромагнит- . ном приводе, содержащем основание, размещенные на нем опоры для ротора, статор и источник переменного тока, подключенный к обмоткам статора, статор выполнен в виде рычажного дугового захвата, ось поворотакоторого закреплена на основании, а привод снабжен источником постоянного тока, также подключенным к обмоткам статора, и блоком управления положением згисвата.
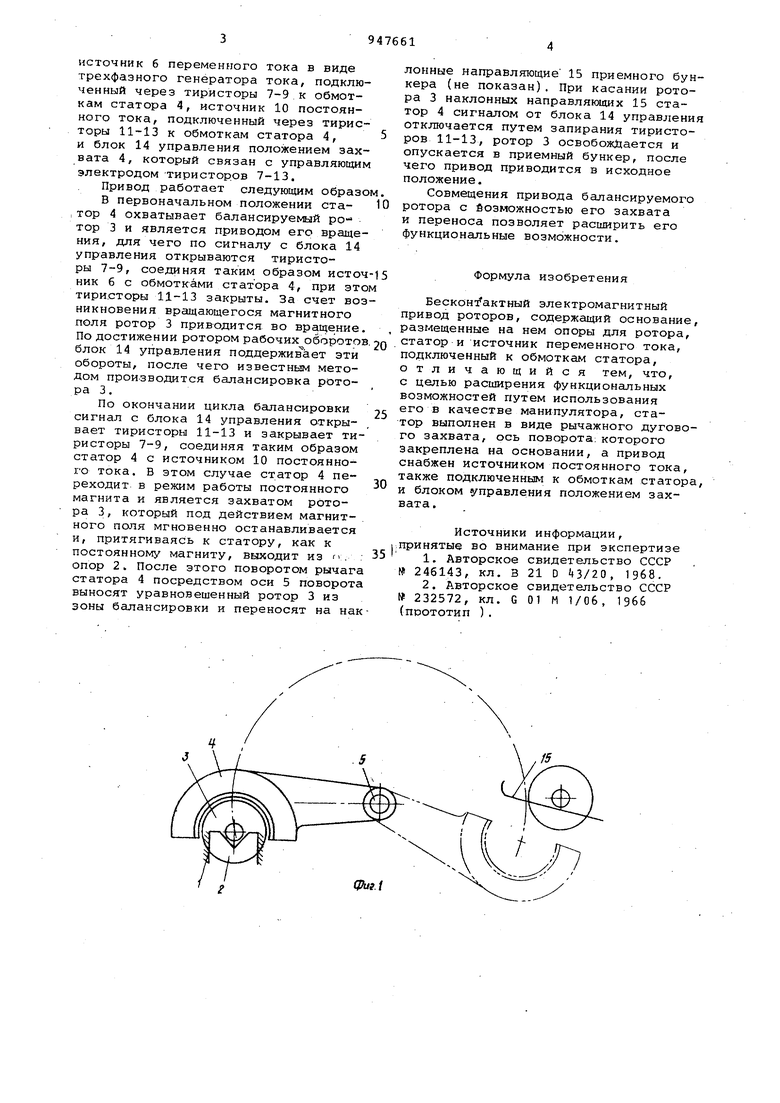
На фиг. 1 изо«5ражен бесконтактный электромагнитный привод, на фиг. 2схема управления привода.
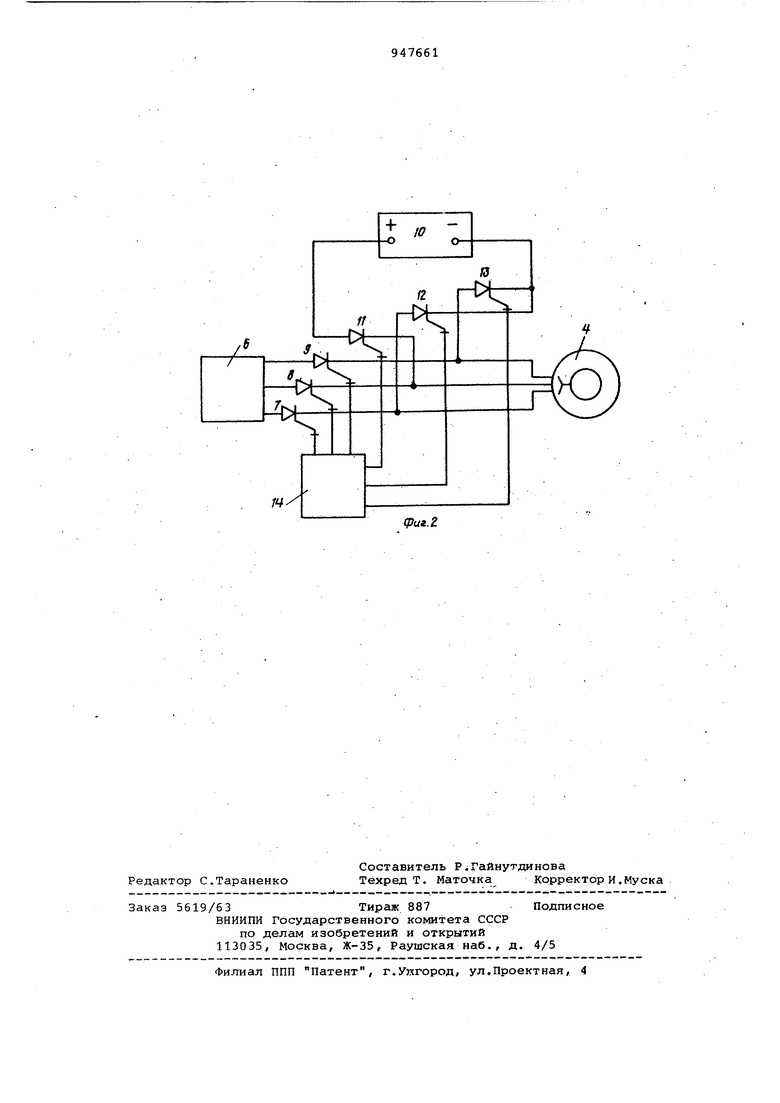
Привод содержит основание 1, размещенные на нем опоры 2 для ротора 3; статор 4, выполненный в виде рычаж- ного дугового захвата, ось 5 поворота которого закреплена на основании 1, источник б переменного тока в виде трехфазного генератора тока, подключенный через тиристоры 1-9 к обмоткам статора 4, источник 10 постоянного тока, подключенный через тиристоры 11-13 к обмоткам статора 4, и блок 14 управления положением захвата 4, который связан с управляюгцим электродом тиристоров 7-13. Привод работает следующим образо В первоначальном положении статор 4 охватывает балансируемый ро- тор 3 и является приводом его вращения, для чего по сигналу с блока 14 управления открываются тиристоры 7-9, соединяя таким образом источ ник б с обмотками статора 4, при это тиристоры 11-13 закрыты. За счет воз никновения вращающегося магнитного поля ротор 3 приводится во вращение По достижении ротором рабочих оборото блок 14 управления поддерживает эти обороты, после чего известным методом производится балансировка ротора 3. По окончании цикла балансировки сигнал с блока 14 управления открывает тиристоры 11-13 и закрывает тиристоры 7-9, соединяя таким образом статор 4 с источником 10 постоянного тока. В этом случае статор 4 переходит в режим работы постоянного магнита и является захватом ротора 3, который под действием магнитного поля мгновенно останавливается и, притягиваясь к статору, как к постоянному магниту, выходит из :. опор 2. После этого поворотом рычаг статора 4 посредством оси 5 поворота выносят уравновешенный ротор 3 из зоны балансировки и переносят на ка лонные направляющие 15 приемного бункера (не показан). При касании ротора 3 наклонных направляющих 15 статор 4 сигналом от блока 14 управления отключается путем запирания тиристоров 11-13, ротор 3 освобояОцается и опускается в приемный бункер, после чего привод приводится в исходное положение. Совмещения привода балансируемого ротора с возможностью его захвата и переноса позволяет расширить его функциональные возможности. Формула изобретения Бескон: актный электромагнитный привод роторов, содержащий основание, размещенные на нем опоры для ротора, статор и источник переменного тока, подключенный к обмоткам статора, отличающийся тем, что, с целью расширения функциональных возможностей путем использования его в качестве манипулятора, статор выполнен в виде рычажного дугового захвата, ось поворота; которого закреплена на основании, а привод снабжен источником постоянного тока, также подключенным к обмоткам статора, и блоком управления положением захвата. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 246143, кл. В 21 D 43/20, 1968. 2. Авторское свидетельство СССР 232572, кл. G 01 М 1/Об, 1966 (прототип ),
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный электромагнитный привод роторов | 1984 |
|
SU1165904A2 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Балансировочный станок | 1988 |
|
SU1597639A1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU957026A1 |
| Устройство для балансировки валов | 1981 |
|
SU974174A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ балансировки ротора | 1987 |
|
SU1464093A1 |
| Устройство для балансировки деталей в собственных подшипниках | 1952 |
|
SU99385A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК С УКРЕПЛЕННЫМ НА ЕГО ШПИНДЕЛЕ ЭЛЕКТРОДВИГАТЕЛЕМ ПРЯМОГО ПРИВОДА | 2006 |
|
RU2317533C1 |