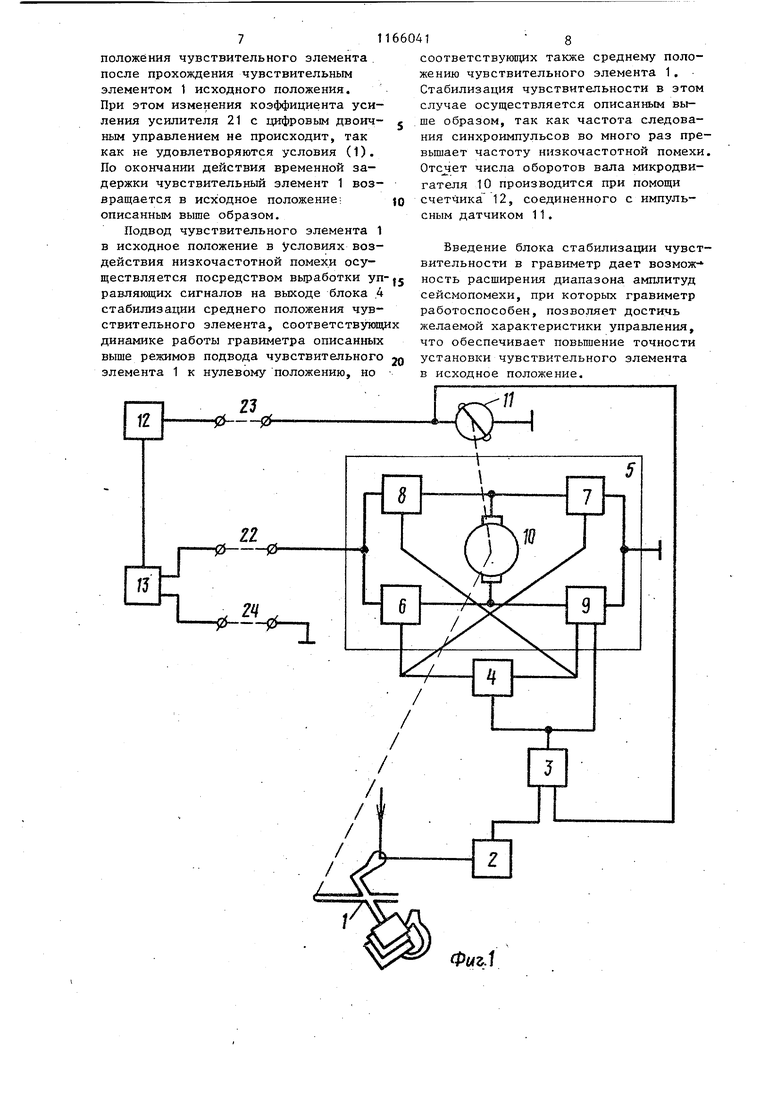
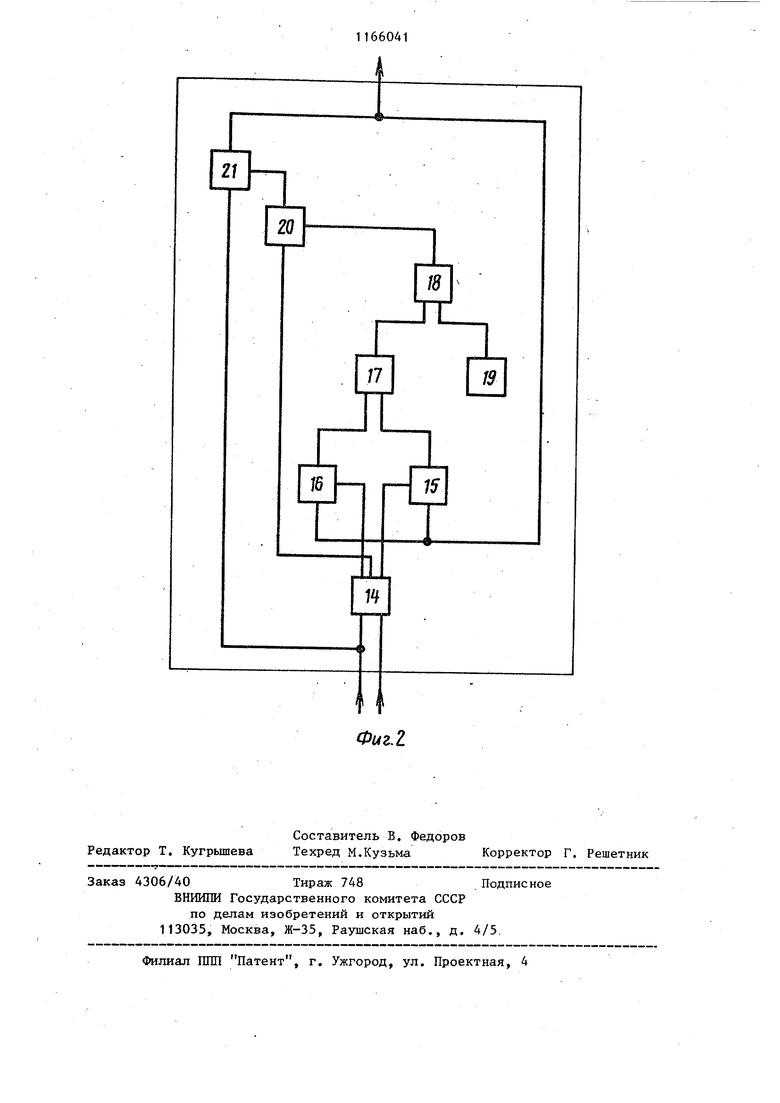
Изобретение относится к гравимет рическим измерениям в скважинах и может быть применено в телеуправляемых гравиметрах. Известен скважинный гравиметр, в котором применена автоматическая компенсация относительных измерений силы тяжести СО. Недостатком гравиметра является низкая точность работы в условиях сейсмических помех. Наиболее близким техническим решением к предлагаемому является гра виметр, содержащий чувствительный э мент, датчик положения чувствительного элемента, блок стабилизации среднего положения чувствительного элемента, микродвигатель, блок управления микродвигателем, включающий блокировочный ключ, возвратные ключи и регулятор, импульсный датчи связанный со счетчиком, и блок пита ния 2. Недостатком известного гравиметра является низкая точность измереНИН из-за нестабильности чувствител ности прибора в процессе каротажа скважины. Эта нестабильность связана с тем, что чувствительность гравиметра сильно зависит от наклона прибора и даже незначительные откло нения положения прибора от горизонтального вызывают значительные изменения сигнала на выходе датчика положения чувствительного элемента. Это обстоятельство значительно умен шает диапазон амплитуд сейсмопомех, при которых гравиметр работоспособе Скважинные испытания показывают изме нения чувствительности в 3-5 раз относительно исходно установленной величины. Кроме того, изменение динами ческого диапазона сигнала, подаваемого с выхода датчика положения чувствительного элемента в качестве обратной связи на вход регулятора, нарушает желаемую характеристику плавного подвода чувствительного эле мента к нулевому положению, что также снижает точность измерений. Цель изобретения - повьшение точности изме1)ения гравиметра. Указанная цель достигается тем, что в гравиметр, содержащий чувствительный элемент, датчик положения чувствительного элемента, блок стабилизации среднего положения чувствительного элемента, микродвигатель, блок управления микродвигателем, включающий блокировочный ключ, возвратные ключи ирегулятор, первый вход которого соединен с первым выходом блока стабилизации среднего положения чувствительного элемента, импульсный датчик, связанный со счетчиком, и блок питания, дополнительно установлен блок стабилизации чувствительности, включающий блок управления, два устройства выборки - хранения, два сравниваюпщх устройства, источник эталонного напряжения, реверсивньй счетчик и усилитель с цифровым двоичным управлением, причем выход последнего связан с входом блока стабилизации среднего положения чувствительного элемента, вторым входом регулятора и с входами устройств выборки-хранения, управля 0 ций вход - с выходом реверсивного счетчика, а вход - с датчиком положения чувствительного элемента и одним из входов блока управления микродвигателем, другой вход которого связан с импульсным датчиком, а три выхода соединены соответственно с управляющими входами устройств выборки-хранения и со счетным входом реверсивного счетчика, управлягшций вход которого связан с выходом второго сравнивающего устройства, один из входов которого связан с источником эталонного напряжения, а другой - с выходом первого сравнивающего устройства, два входа которого соединены соответственно с выходами устройств выборкихранения , На фиг. 1 приведена блок-схема гравиметра; на фиг. 2 - блок стабилизации чувствительности гравиметра. Гравиметр содержит чувствительный элемент 1, датчик 2 положения чувствительного элемента, блок 3 стабилизации чувствительности, блок 4 стабилизации среднего положения чувствительного элемента, блок 5 управления микродвигателем, включающий возвратные ключи 6 и 7, блокировочный ключ -8, регулятор 9 и микродвигатель 10, импульсный датчик 11, счетчик 12, блок 13 питания. Блок 3 стабилизации чувствительности гравиметра содержит блок 14 управления, устройства 15 и 16 выборки-хранения, сравнивающие устройства 17 и 18, источник 19 эталонного напряжения, реверсивный счетчик 20 и
усилитель 21 с цифровым двоичным управлением. Скважинная и наземная части гравиметра соединены жилами 22 я 23 к броней 24 кабеля. Чувствительный элемент 1 гравиметра связан с первым входом блока 3 стабилизации чувствительности и валом микродвигателя 10, имегацего импульсный датчик 11 числа оборотов, соединенный со счетчиком 12 жилой 23 кабеля, Микродвигатель 10 подключен к блоку 13 питания жилой 22 кабеля с одной стороны - через возвратные ключи 6 и 7, с другой - через блокировочный ключ 8 и регулятор 9. Второй вход последнего и вход блока 4 стабилизации среднего положения чувствительного элемента соединены с выходом блока 3 стабилизации чувствительности, второй вход которого соединен с выходом датчика 2 положения. Входы возвратных ключей 6 и 7 связаны-с вто-. рым выходом блока 4 стабилизации сренего положения маятника, а вход блокировочного ключа 8 и второй вход
/регулятора - с его первым выходом, Вькод усилителя 21 с цифровым двоичньш управлением, соединенный с входом устройств 15 и 16 выборки-хранения, является одновременно выходом блока 3 стабилизации чувствительности, первым входом которого .является первый вход блока 14 управления,. а второй вход составляют соединение вход усилителя 21 с цифровым двоичным управлением и второй вход блока 14 управления, один из выходов которого связан с входом реверсивно -о счетчика 20, .а два других - соответ.ственно с управляющими входами устройств 15 и 16 выборки-хранения,, выходы которых соединены соответственно с двумя входами сравнивающего устройства 17, выход которого связан с вторым входом сравнивающего устрой ства 18, первьй вход которого подключен к источнику 9 эталонного напряжения, а выход - к управлякяцему входу реверсивного счетчика 20,
Гравиметр работает следующим образом,
В исходном состоянии чувствительный элемент 1 находится в горизонтальном (нулевом) положении. На выходе датчика 2 положения чувствительного элемента и на выходе усилителя 21с цифровым двоичным управлением напряжение равно нулю. В этом
состоянии на обоих выходах блока 4 стабилизации среднего положения чувствительного элемента присутствуют нули, ключи 6-8 и регулятор 9 заперты, микродвигатель 10 не вращается. На всех трех выходах блока 14 управления, как и на выходе уст- ройств 15 и 16 выборки-хранения, на выходе сравнивающего устройства 17 и на вькоде реверсивного счетчика
20имеются нули. Источник 19 эталонного напряжения включен на вход сраТвнивакщего устройства 18, в силу чего на выходе последнего присутст- вует +1, Коэффициент усиления усилителя 21 с цифровым двоичным управлением равен постоянной, заранее установленной величине К, При увеличении силы тяжести на выходе датчика 2 положения чувствительного элемента появляется напряжение положительной полярности, которое через усилитель
21с цифровым двоичным управлением, поступает на второй вход регулятора 9 и на вход блока 4 стабилизации среднего положения чувствительного элемента, на втором выходе которого по-прежнему остается О, а на первом выходе появляется 1, которая открывает блокировочный ключ 8 и подготавливает к работе регулятор 9, Положительное напряжение на втором входе последнего способствует его открыванию. Микродвигатель 10 начинает вращаться в том направлении, при котором чувствительный элемент поднимается в исходное положение. При этом на первьй вход блока 14 управления поступают синхронизирующие импульсы от импульсного датчика 1 1 . Начиная с момента времени t бигнал на выходе датчика 2 положения чувствительного элемента удовлетворяет следунхцим условиям:
О и
Ui
(;
-fdU)
dUj .
(1)
,dt/MMH dt Vdt
Соответствие характера сигнала в момент времени t указанным условиям определяется блоком 14 управления, на выходах которого с этого времени формируются импульсы, управляющие работой всего блока 3 стабилизации чувствительности. Устройства 15 и 16 выборки-хранения поочередно переключаются в режим отслежи-
вания сигнала на выходе усилителя 21 с цифровым двоичным управлением, причем переключение устройства 15 выборки-хранения в режиме отслеживания происходит в момент прихода на его управляющий вход первого, следующего за моментом времени t управляющего импульса длительностью Т , передний фронт которого совпадает с синхроимпульсом на первом входе блока 14 управления. Во время действия управляющего импульса напряжения на выходе устройства 15 выборки-хранения повторяет сигнал на выходе усилителя 21 с цифровым двоичным управлением, что обуславливает появление такого же напряжения на выходе сравнивающего устройства 17, превышакяцего по величине источник 19 эталонного напряжения, вследствие чего на выходе сравнивающего устройства 18 появляется 1. В момент окончания действия управляющего импульса устройство 15 выборки-хранения запоминает мгновен- ное значение напряжения на выходе к
лителя 21 с цифровым двоичным управлением. Переключение устройства 16 выборки-хранения в режиме отслежива ния происходит по приходу на его управляющий вход второго управляющего импульса длительностью t в момент, совпадающий с моментом появления второго синхроимпульса, причем во время действия второго управляющего импульса происходит следующее: напряжение на выходе устройства 16 выборки-хранения повторяет сигнал на выходе усилителя 21 с цифровым двоичным управлением, и на выходе сравнивающего устройства 17 образуется сиг нал абсолютной разности напряжения на выходе устройства 16 выборхш-хра;нения и напряжения, хранимого в устройстве 15- ли, превьштающий по величине источник 19 эталонного напряжения, вследствие чего на выходе сравнивающего устройства 18 остается 1 и в момент прихода импульса на вход реверсивного счетчика 20, отстоящий от момента начала действия второго управляющего импульса на половину его длительности ( С /2), коэффициент К усиления усилителя 21 с цифровым двоичным управлением уменьшается на величину дК, вследствие чего уменьшается величина сигнала на его выходе, В момент окончания действия второго управляющего импульса устройство 16 выборки-хранения запоминает мгновенное значение сигнала на выходе усилителя 21 с цифровым двоичным управлением. С приходом последующих синхроимпульсов в блоке 3 стабилизации чувствительности происходят процессы, аналогичные описанным вьше, в результате чего к моменту прихода шестого синхроимпульса коэффициент усиления усилителя 21 с цифровым двоичным управлением уменьшается до величины
К К - 4 4К,
а во время прихода шестого синхронизирующего импульса сигнал абсолютной разности на выходе сравнивающего устройства 17 сравнивается по величине с источником 19 эталонного напряжения и ни выходе сравниваннцего устройства 18 появляетс;я О, в результате чего коэффициент усиления усилителя 21 с цифровым двоичным управлением остается без изменений. По мере приближения чувствительного элемента 1
щения микродвигателя 10 уменьшается из-за уменьшения величины сигнала на выходе датчика 2 положения, и к мо менту прихода седьмого синхроимпульса чувствительный элемент 1 возвращается в исходное положение.
Таким образом, в процессе установки чувствительного элемента 1 в исходное положение происходит компенсация изменений механической чувствительности гравиметра путем изменения коэффициента усиления усилителя 21 с цифровым двоичным управлением.
При уменьшении силы тяжести на выходе датчика 2 положения появляется напряжение отрицательной полярности, которое через усилитель 21 с цифровым двоичным управлением поступает на вход блока 4 стабилизации среднего положения чувствительного элемента, на первом выходе которого .появляется О, а на втором . Сигнал 1 с второго выхода блока 4 стабилизации среднего положения чувствительного элемента открывает возвратные ключи 6 и 7. Микродвигатель 10, вращаясь с постоянной скоростью, переводит чувствительньй элемент 1 через исходное положение в тяжелую сторону вследствие временной задержки сигнала -1 на втором выходе блока 4 стабилизации среднего исходному положению скорость враположения чувствительного элемента . после прохождения чувствительным элементом 1 исходного положения. При этом изменения коэффициента усиления усилителя 21 с цифровым двоичным управлением не происходит, так как не удовлетворяются условия (1). По окончании действия временной задержки чувствительный элемент 1 возвращается в исходное положение; описанным выше образом. Подвод чувствительного элемента 1 в исходное положение в условиях воздействия низкочастотной помехи осуществляется посредством выработки уп равляющих сигналов на выходе блока .4 стабилизации среднего положения чувствительного элемента, соответствующ динамике работы гравиметра описанных выше режимов подвода чувствительного элемента 1 к нулевому положению, но 1 1 8 соответствующих также среднему положению чувствительного элемента 1, Стабилизация чувствительности в этом случае осуществляется описанным выше образом, так как частота следования синхроимпульсов во много раз превышает частоту низкочастотной помехи. Отсчет числа оборотов вала микродвигателя 10 производится при помощи счетчика 12, соединенного с импульсным датчиком 11, Введение блока стабилизации чувствительности в гравиметр дает возмож- кость расширения диапазона амплитуд сейсмопомехи, при которых гравиметр работоспособен, позволяет достичь желаемой характеристики управления, что обеспечивает повьшение точности установки чувствительного элемента в исходное положение.
J9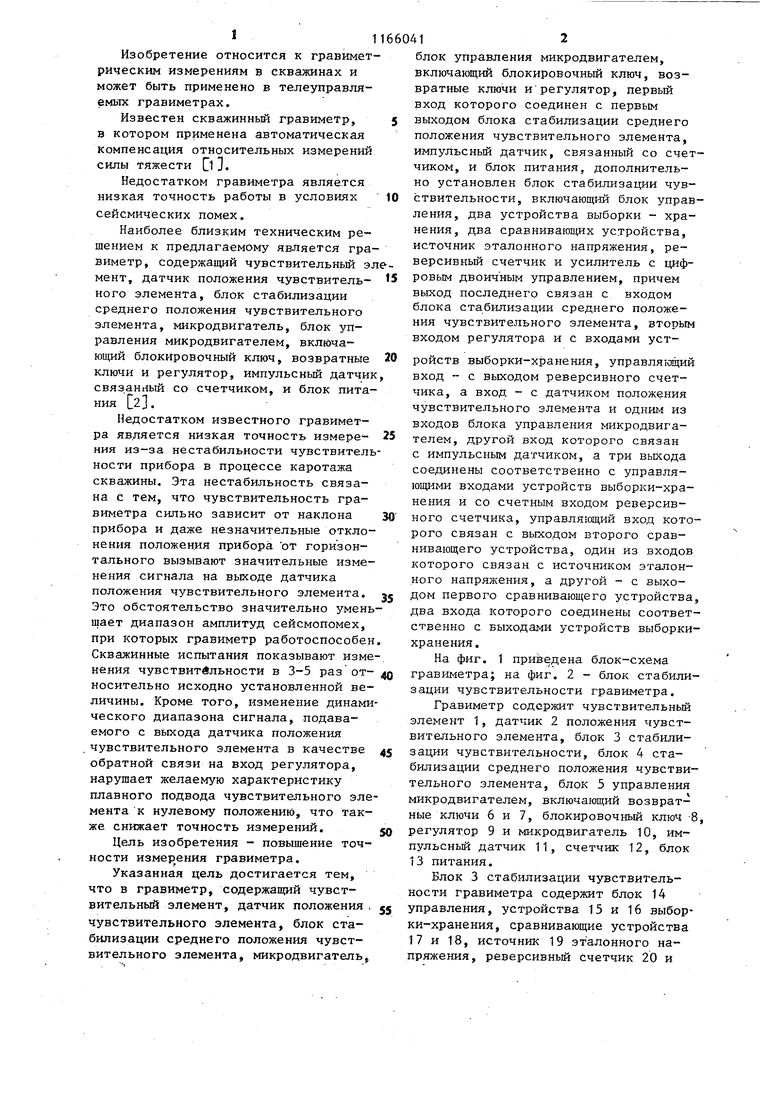
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный скважинный гравиметр | 1980 |
|
SU890340A1 |
| Скважинный гравиметр | 1981 |
|
SU1062633A1 |
| Гравиметр | 1982 |
|
SU1117562A1 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2360258C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190226C1 |
| Устройство управления режимом термообработки бетонных и железобетонных изделий | 1989 |
|
SU1689078A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2359277C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449292C1 |
| Скважинный гравиметр | 1981 |
|
SU1075213A1 |
ГРАВИМЕТР, содержащий чувствительньш элемент, датчик положения чувствительного элемента, блок стабилизации среднего положения чувствительного элемента, микродвигатель, блок управления микродвигателем, включакщий блокировочньй ключ, возвратные ключи и регулятор, первый вход которого связан с первьм выходом блока стабилизации среднего положения чувствительного элемента, импульсный датчик, связанньй со счетчиком, и блок питания, отличаю-щийс я тем, что, с целью повышения точности измерения, в него дополнительно установлен блок стабилизации чувствительности, включающий усилитель с цифровым управлением, выход которого связан с входом стабилизации среднего положения чувствительного элемента, вторым входом регулятора и с входами устройств выборки хранения,. управлякнций вход - с выходом реверсивного счетчика, а вход с датчиком положения чувствительного элемента и одним из входов блока управления микродвигателем, другой вход которого связан .с импульсным датчиком, а три выхода соединены соответственно с управляющими входами двух устройств СО выбор1 и-хранения и со счетным входом реверсивного счетчика, управляющий вход которого связан с выходом второго сравнивающего устройства, один из входов которого связан с источником эталонного напряжения, а другой с выходом первого сравнивающего g устройства, два входа которого соединены соответственно с выходами устройств выборки-хранения.
/6
75
Фиг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматизированный скважинный гравиметр | 1980 |
|
SU890340A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
