I
Изобретение относится к гравиметрическим измерениям в скважинах и может быть применено при донной съемке, на суше и мелководье с бор-та вертолета в режиме зависания.
Известен гравиметр, в котором применена автоматическая компенсация относительных изменений силы тяжести
Недостатком данного гравиметра является использование двухскоростного режима работы исполнительного двигателя, что не обеспечивает плавного подхода к нулевому положению, к тому же переход в разные режимы работы осуществляется с помощью электромеханических реле.
Известен также скважинный гравиметр с автоматической компенсацией относительных изменений силы тяжести, исключающий указанные недостатки и увеличивающий точность измере|Ний. Этот гравиметр содержит датчик положения маятника, включающий в
себя фотоэлементы.и усилитель, схему управления двигателем, устройство временной задержки (ждущий мультивибратор) . При этом схема управления двигателем, содержащая два возвра-тных, блокировочный ключи и регулирующий элемент с ждущим мультивибратором, позволяет произвести плавный подвод маятника к нулевому положению всегда с одной стороны, а
10 результаты измерения отсчитываются по счетчику, соединенному с импульсным датчиком. Положение маятника контролируется при помощи индикаJ- тора нуля. Гравиметр работает на трехжильном кабеле 2}.
Недостатком известного гравиметра является уменьщение точности измерения и низкая надежность при
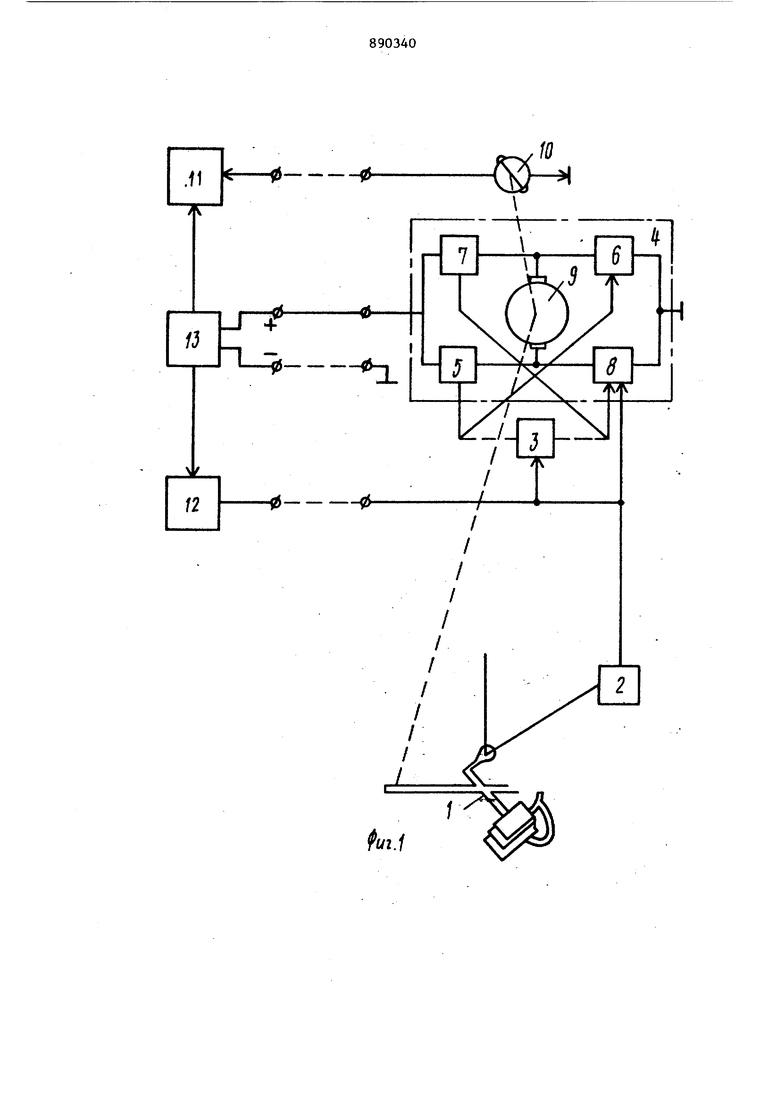
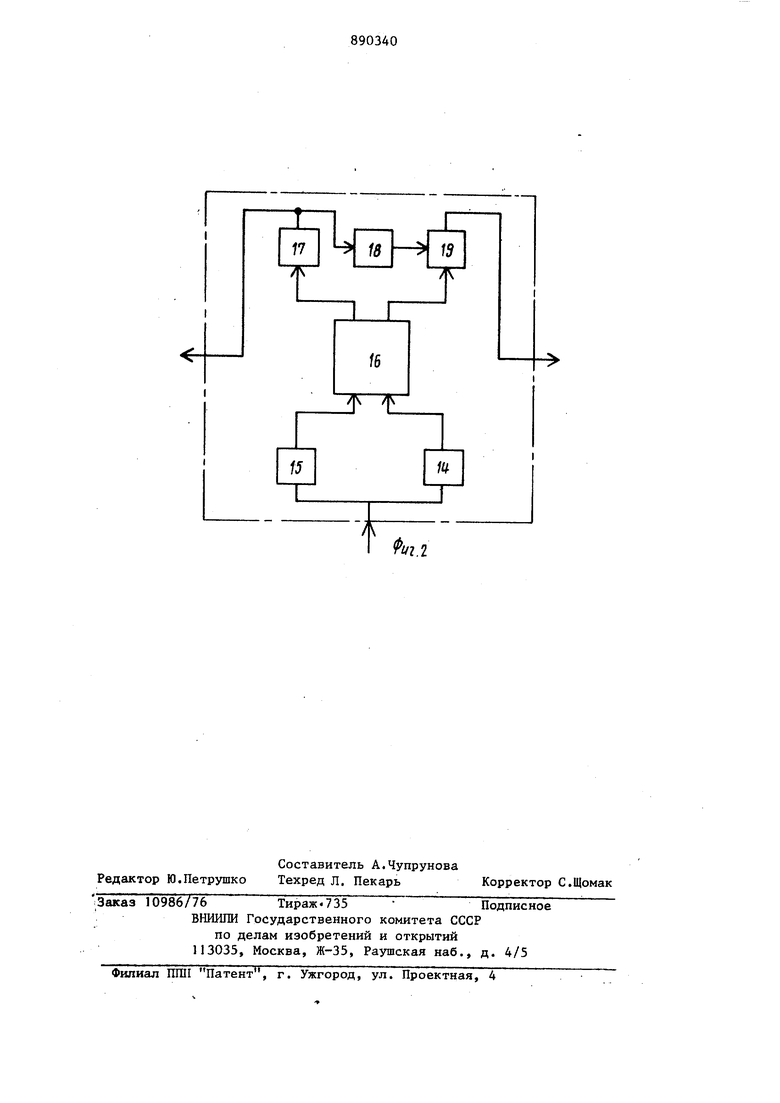
20 работе в условиях сейсмических помех. Это связано с тем, что сейсмические и прочие помехи, вызывакщие принудительные колебания маятника чувствительной системе:, приводят к (Появлению соответствующих колебаний сигнала на выходе датчика положения маятника. Ввиду того, что управляющее воздействие на двигатель определяется сигналом на выходе датчика положения маятника, то для устойчивого подвода маятника к нулевому положению необходимо выбрать зону нечувствительности вокруг нулевого положения, равную удвоенной максимальной амплитуде колебаний сиг нала на выходе датчика положения маятника. Цель изобретения - повышение точности измерения и надежности работы гравиметра в условиях сейсмических и прочих помех. Цель достигается тем, что в автом тизированном скважинном гравиметре, содержащем датчик положения маятни ка и блок управления микродвигателя включающий соединенные блокировочный ключ, возвратные ключи и регули рующий элемент, первый вход которого соединен с выходом датчика положения маятника, дополнительно установлен блок стабилизации среднего положения маятника, выполненный в виде двух экстремум-детекторов, оди из сигналов которых положительной полярности, а другой отрицательной полярности, общий вид которых соеди нен с датчиком положения маятника, а выходы соединены со сравнивающим устройством, один из выходов которо го соединен с блоком временной задержки, один из выходов которого связан с возвратными ключами, а дру гой - через инвертор со схемой И, второй вход которой соединен с выхо дом сравнивающего устройства, а выход - со вторым входом регулирующего элемента и блокировочным ключом. На фиг. 1 приведена блок-схема автоматизированного скважинного гравиметра; на фиг. 2 - пример конкретного выполнения блока стабилизации среднего положения маятника гравиметра. Автоматизированный скважинный гравиметр содеряшт маятник 1, датчи положения маятника 2, блок стабилизации среднего пололсения маятника 3, блок управления двигателем 4, включающим возвратные ключи 5 и 6 блокировочньш ключ 7, регулирующий элемент 8 и двигатель 9, импульсный датчик 10, счетчик 11, индикатор нуля 12, источник питания 13. . 4 Блок стабилизации среднего положения маятника (фиг. 2} содержит зкстремум-детектор положительных 14 и отрицательных 15 сигналов, сравнивающее устройство 16, блок временной задержки 17, инвертор 18, схему И 19. Маятник чувствительной системы гравиметра связан с валом двигателя 9, имеющего импульсный датчик 10 числа оборотов, соединенный с счетчиком 11. Двигатель 9 включен к источнику питания с одной стороны через возвратные ключи 5 и 6, с другой стороны - через блокировочный ключ 7 и регулирующий элемент 8. Первый вход последнего и вход блока стабилизации среднего положения маятника 3 соединены с выходом датчика положения маятника 2, сюда же присоединен индикатор нуля 12. Входы возвратных ключей 5 и 6 связаны со вторым выходом блока стабилизации среднего положения маятника 3, а вход блокировочного ключа 7 и второй вход регулирующего элемента 8 связаны с его первым выходом. Источник питания 13 соединен с гравиметром с помощью кабеля. Входы экстремум-детекторов положительных 14 и отрицательных 15 сигналов связаны между собой и составляют вход блока стабилизации среднего положения маятника (фиг. 2), причем их выходы через сравнивающее устройство 16 связаны соответственно с первым входом схемы И 19 и входом блока временной задержки I7. Второй вход схемы И 19 через инвертор 18 соединен с выходом блока временной задержки 17, который одновременно является вторым выходом блока стабилизации среднего положения маятника 3, первым выходом которого является выход схемы И 19. Устройство работает следующим образом.. В исходном состоянии из-за сейсмических помех маятник 1 гравиметра симметрично колеблется относительно горизонтального (нулевого) положения, что обуславливает аналогичные колебания сигнала .на выходе датчика положения маятника 2. Положительные и отрицательные амплитуды сигнала запоминаются соответствующими экстремумдетекторами 14 и 15, а затем сравниваются при помощи сравнивающего устройства 16. Поскольку в исходном состоянии эти амплитуды одинаковы, то
на обоих выходах сравнивающего устройства 16 имеются нули. В этом состоянии на обоих выходах блока стабилизации среднего положения маятника 3 также присутствуют нули. Ключи 5, 6, и 7 и регулирующий элемент 8 заперты, двигатель 9 не вращается. Индикатор нуля 12 показьшает равномерные колебания маятника 1 относительно нулевого положения.
При увеличении силы тяжести маятник 1 опускается вниз. На вькоде датчика положения маятника 2 появляется напряжение положительной полярности с меняющейся величиной, которо через экстремум-детектор 14 поступает на первый вход сравнивающего устройства 16, на втором входе которого сигнал отсутствует. В результате сравнения на первом выходе сравнивающего устройства 16 появляется сигнал 1, на втором его выходе попрежнему остается О, что приводит к появлению 1 на первом выходе блока стабилизации среднего положения маятника 3 и О на его втором выходе 1 на первом выходе блока стабилизации среднего положения маятника 3 открывает блокировочный ключ 7 и подготавливает к работе регулирующий элемент 8, причем на первый вход последнего поступает положительное напряжение с выхода датчика положения маятника 2, способствующее открыванию регулирующего элемента 8. Через двигатель 9 течет ток Jg , заставляющий его вращаться в том направлении, при котором маятник 1 поднимается в исходное положение. Величина тока двигателя 9 при открытом ключе 7 зависит от степени открьшания регулирующего элемента 8, т.е. от величины напряжения на его первом входе. По мере приближения маятника 1 к исходному положению скорость вращения двигателя 9 уменьшается из-за уменьщения величины сигнала на выходе датчика положения маятника 2. С уменьшением величины, сигнал с некоторого момента времени становится знакопеременный с большей величиной положительной амплитуды, что определяется сравнивающим устройством 16, удерживающим схему в прежнем состоянии (направление вращения двигателя не изменяется). При достижении маятником 1 исходного положения отрицательная амплитуда сигнала становится равной положительной, и схема возвращается в исходное состояние. Таким образом достигается ц&пь автоматического плавного возврата маятника I гравиметра в нулевое положение в условиях сейсмических помех.
Рассмотрим случай, когда сила тяжести уменьшается и маятник 1 поднимается. На выходе датчика положения маятника 2 появляется напряжение
отрицательной полярности с меняющейся величиной, которое через экстремум-детектор 15 поступает на второй вход сравнивающего устройства 16, на первом входе которого сигнал отсутствует. В результате сравнения на втором выходе сравнивающего устройства 16 появляется сигнал I, а на первом его выходе по прежнему остается О. Сигнал Г через Сшок
временной задержки 17 поступает на второй выход блока стабилизации среднего положения маятника 3, на первом выходе которого имеется сигнал О, и открывает возвратные ключи 5 н 6.
По обмотке двигателя 9 протекает номинальный ток JH в противоположном направлении. При достижении маятником 1 нулевого положения отрицательная и положительная амплитуда
сигнала становятся одинаковыми, на
обоих выходах сравнивающего устройства имеется О. Однако схема в . исходное состояние не возвращается и Г присутствует на втором выходе блока стабилизации среднего положения маятника за счет работы блока временной задержки 17. Функция последнего заключается в задержке сигнала I на время д после снятия сигнала 1 с его входа. Дальнейшее движение маятника вниз изменяет полярность средней величины сигнала на выходе датчика положения маятника 2 с отрицательной на положительную, что формирует 1 на первом
выходе сравнивающего устройства 16, которая поступает на первый выход блока стабилизации среднего положения маятника 3, только по окончании действия сигнала 1 на выходе бло.ка временной задержки 17 (на обоих входах схемы И 19 формируются 1). В момент появления 1 на первом выходе блока стабилизации среднего положения маятника 3 начинается
плавный возврат маятника 1 к нулевому положению.
Таким образом, обеспечивается в условиях сейсмических помех плав,ный подход к нулевому положению только с одной стороны. При отсутствии сейсмических поме с подводом маятника 1 в нулевое положение полярность сигнала на выходе датчика положения 2 не изменяется. Поэтому сигнал на одном из входов сравнивающего устройства равен нулю, и плавный подвод маятника к нулевому положению выполняется так же, как описано выше. Отсчет числа оборотов вала двига теля 9 производится при помощи счет чика 11, соединенного с импульсным датчиком 10, а положение маятника 1 указьшает индикатор нуля 12, подключенный к выходу датчика положения маятника 2. Введение блока стабилизации среднего положения маятника в гравиметр дает возможность автоматизировать измерение относительных изменений силы тяжести в условиях сейсмических помех. Это .обеспечивает повышен точности измерений при наличии меша ющего фона - сейсмических помех. Ис ключение в данном устройстве влияния сейсмических помех также повыша ет надежность работы гравиметра. Формула изобретения Автоматизированный скважинный гр .виметр, содержащий датчи положения 0. 8 маятника и блок управления микродвигателем, включающий соединенные блокировочный ключ, возвратные ключи и регулирующий элемент, первьй вход которого соединен с выходом датчика положения маятника, отличающийся тем, что, с целью повышения точности и надежности работы гравиметра в условиях сейсмических помех, он дополнительно содержит блок стабилизации среднего положения маятника, содержащий экстремум-детектор сигналов положительной полярности и экстремум-детектор сигналов отрицательной полярности, общий вход которых соединен с датчиком положения маятника, а выходы соединены со сравнивающим устройством, один из выходов которого соединен с блоком временной задержки, один из выходов которого связан с возвратными ключами, а другой - через инвертор со схемой И, второй вход которой соединен с выходом сравнивающего устройства, а выход - со вторым входом регулирующего элемента и блокировочным ключом. Источники информации, принятые во внимание при экспертизе 1.Веселов К.Е. и др. Автоматический, гравиметр, - Разведочная геофизика, 1975, № 69, с. 120. 2,Авторское свидетельство СССР по заявке № 2545779/18-25, кл. G 01 V 7/02, 1978.(прототип).
иг.г

| название | год | авторы | номер документа |
|---|---|---|---|
| Скважинный гравиметр | 1981 |
|
SU1075213A1 |
| Гравиметр | 1983 |
|
SU1166041A1 |
| Гравиметр | 1981 |
|
SU966553A1 |
| Гравиметр | 1982 |
|
SU1117562A1 |
| Автоматизированный скважинный гравиметр | 1977 |
|
SU746372A1 |
| Скважинный гравиметр | 1981 |
|
SU1062633A1 |
| Устройство для определения заполнения скважинного штангового насоса | 1987 |
|
SU1507957A1 |
| Система для управления и контроля привода гравиметра | 1980 |
|
SU954924A1 |
| Устройство для измерения мощности двигателя | 1982 |
|
SU1030678A1 |
| Система управления гравиметром | 1982 |
|
SU1084728A1 |