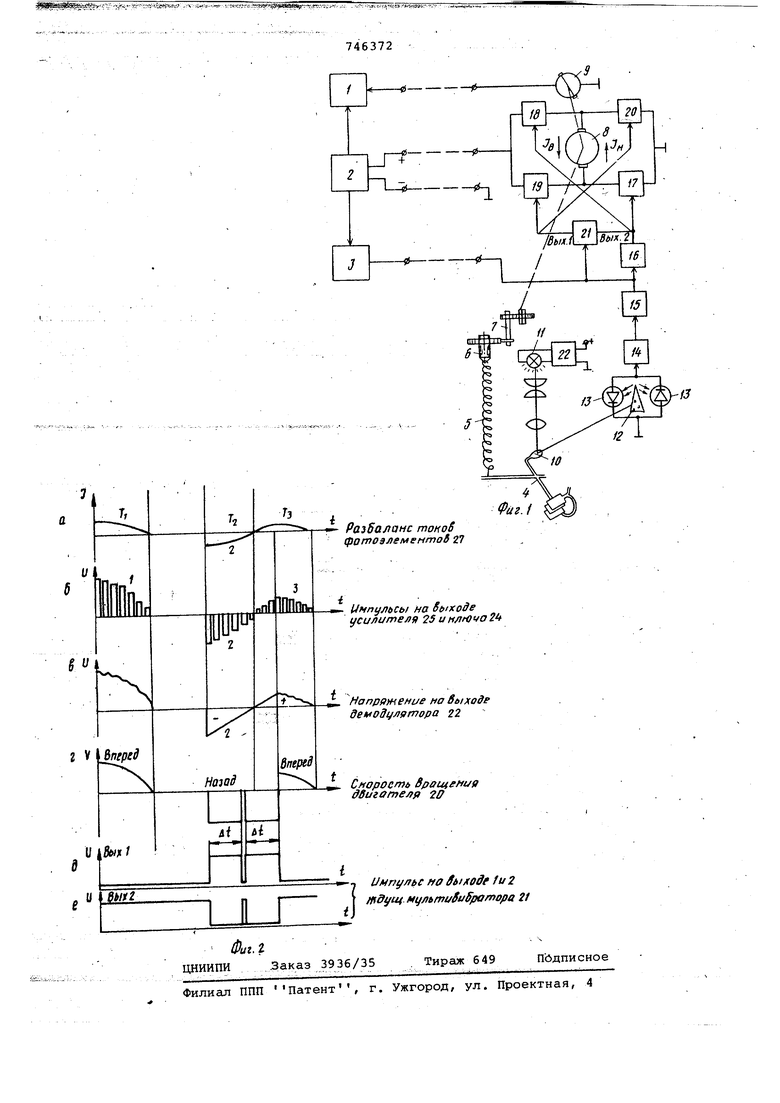
1 . Изобретение относится к гравиметрическим измерениям в.скважинах и может быть применено в гравиметрических работах на дне водных бассейнов с корабля и на суше с борта вертолета в статическом режиме. . Известны скважинные гравиметры, со держащие кварцевую упругую систему и систему телеуправления работой гравиметра с поверхности. Эти устройства позволяют вести гравиметрический каротаж нефтяных скважин посредством измерения изменений си.лы тяжести вдоль оси ствола скважин (1. Однако отсутствие автоматической компенсации изменений силы тяжести в указанных гравиметрах приводит к субъективным ошибкам при измерении, и необходимост использования каротажного кабеля с семью или более жилами создает определенные технические трудности и вызывает необоснованные дополнительные расходы., Известен донный универсальный гра виметр, в котором применена автоматическая компенсация относительных изменений силы тяжести, где испольэована система, состоящая из двигателя, трех реле, дифференциального индикатора, лампы осветителя, находящихся внутри гравиметра и самописца, отдельного источника питани.я, включателя, миллиамперметров, находящихся на пульте управления. Пульт соединяется с гравиметром десятижильным кабелем. В системе автоматизации происходит автоматическое переключение скорости микрометрического винта - с максимальной до минимальной, что Делает данную систему устойчивой 2. Однако использование двух граничных значений скорости исключает плавный подход к нулевому положению. Сама схема автоматизации, из-за применения электромеханических реле в корпусе гравиметра является неэффективной. Кроме того, система не предусматривает подхода к нулевому положению вс.егда с одной стороны,.что устранило бы влияние люфта микровинта и других элементов кинематики на точность измерения.:Построение же всей схемы в расчете ни использование многожильного- (в данном случае десятижильного) кабеля вызывает необходи-, мость переводки подобного кабеля во все объекты. Целью изобретения является повышение точности измерения и надежноеТИ работы, a также использования трехжильного кабеля, имеющегося на бурящихся скважинах. Указанная цель достигается тем, что в скважинный гравиметр введены модулятор, усилитель, демодулятор, регулирующий элемент, ждущий мультивибратор. Два возвратных и один блокировочный ключи, причем микродвигатель к источнику питания подключен через возвратные и блокировочный ключи и регулирующий элемент, вход которого через демодулятор, усилитель и модулятор соединен с выходом фотоэлементов, а входы возвратных ключей и блокировочного ключа с регулирующим элементом попа но подключены к противоположным выходам ждущего мультивибратора, вход которого соединен с выходом усилите ля, соединенного с индикатором нуля Нафиг. 1 прйведена блок-схема предлагаемого автоматизированного скважинного гравиметра; на фиг. 2 кривые, поясняющие принцип егодействия. На поверхности расположены счетчик оборотов 1, источник питания 2 и индикатор нуля 3, которые с помощью трехжильного бронированного кабеля соединяются с гравиметром. Чувствительным элементом гравиме ра являетсй маятник 4, который с по щью пружины 5, микровинта б и редук тора 7 связан с валом микродвигателя 8, имеющего импульсный датчик 9 числа оборотов, соединенный со счет чиком 1 жилой кабеля. На маятнике, прикреплено зеркальце 10 для отраже ния светового луча лампочки 11 чере призму 12 на фотоэлементы 13. В кор пусе Скважинного снаряда расположены модулятор 14, усилитель 15, демо дулятор 16, регулирующий элемент 17 блокирЬвочный ключ 18, возвратные ключи 19, 20, ждущий мультивибратор 21 и стабилизатор 22. Микродвигател 8 вкличен к источнику питания с одной стороны через возвратные ключи 19, 20, с другой стороны - через бл кировочный ключ 18 и регулирующий элемент 17. Вход последнего через демодулятор 16, усилитель 15 и моду лятор 14 соединен с выходом фотоэле ментов 13. Входы возвратных ключей 19, 20 и входы блокировочного ключа 18 и регулирующего элемента 17 попа но соединены с противоположным, выходом ждущего мультивибратора 21, вход которого соединен с выходом усилителя 15, сюда же подсоединен и дикатор нуля 3 жилой ЛЭ кабеля связи. Источник питания 2 соединен с гравиметро с помощью одной жилы- и брШи кабеля.. Гравиметр работает следующим образом.
746372 в исходном, горизонтальном (нулевом) положении маятника световой луч лампочки 11, отраженной от зеркальца 10 и прошедший через призму 12, равномерно освещает поверхности фотоэлементов 13, соединенных по дифференциальной схеме. При этом отсутствует ток разбаланса фотоэлементов, а напряжение на входе регулирующего элемента 17равно нулю и он заперт. Ключи 19 и 20 заперты, а .ключ 18 открыт ждущим мультивибратором 21. МикродвИгатель 8 не вращается. На поверхности индикатор нуля 3 фиксирует нулевое положение маятника 4. При увеличении силы тяжести маятник 4 опускаемся вниз, меняет полокение зеркальца 10, что приводит к изменению освещенности фотоэлементов 13 и на их выходе появляется ток разбаланса, с положительной полярностью (фиг. 2а, кривая I) и подается на вход модулятора 14. На выходе последнего формируются прямоугольные импульсы, которые усиливаются усилителем 15 (фиг. 26) и подаются на входы демодулятора 16, индикатора нуля 3 и яодущего мультивибратора 21. Последний, реагирующий только на отрицательные импульсы, не переключаются. Поэтому напряжение на его выходе (фиг. 2е) продолжает удерживать кдюч 18 в открытом состоянии, а на вход регулирующего элемента 17 подается напряжениеС выхода демодулятора 16 (фиг. 2в). Это способствует открыванию регулирующего элемента 17. При .этом через микродвигатель 8 потечет ток 3в , заставляющий его вращаться в том направлении, при котором микрометрический винт 6 с помощью пружины 5 поднимает маятник 4 в исходное нулевое положение. Величина тока микродвигателя 8, а,следовательно, и скоростьего вращения при открытом ключе 18 зависит от степени открывания регулирующего элемента 1, т. е. от величины напряжения на его входе, и в конечном итоге, от разности токов разбаланса фотоэлементов 13. Чем больше разбаланс токо,в, тем больше скорость вращения двигателя и скорость возвращения маятника 4 в исходное положение. По мере приближения к нулевому положению уменьшается разбаланс токов фотоэлементов 13,. напряжение на входе регулирующего элемента 14 и на входе индикатора нуля 3. Это приводит к уменьшению скорости вращения микродвигателя 8, При достижении нулевого положения фотоэлементы 13 освещаются одинаково, исчезает ток разбаланса и напряжение на входе; регулирующего элемента 17 падает до нуля. Последний закрывается, прекращается ток через мзикродвигатель 8 -и оН останавливается. Таким образом достигается автоматический плавный возврат маятника гравиметра в нулевое положение. Рассмотрим случай, когда сила тяжести уменьшается и маятник поднимается вверх. При этом разбаланс токов имеет отрицательнуй) полярность (фиг. 2а, кривая T.ij) . На выходе усилителя 15 появляются отрицательные импульсы 2 (фиг. 26). От первого отрицательного импульса переключается ждущий мультивибратор 21 и на его выходе вых. 1 появляется импульс с длительностью дЬ, от которого открываются ключи,19 и 20, а исчезнове ние напряжения с вых. 1 приводит к запиранию ключа 18 и регулирующего элемента 17. По обмотке микродвигателя через открытые ключи 19 и 20 пр текает номинальный ток Зц в противоположном направлении (фиг. 2г назад). Двигатель 8 с постоянной ско ростью вращается в обратном направле НИИ и перемещает маятник вниз., Если по оконнании вьщержки At импульса маятник не вернулся к нулю, то на вход ждущего мультивибратора 21 продолжают поступать отрицательные импульсы и он вновь переключается, а двигатель продолжает вращение еще на At время. Этот процесс будет повторяться несколько раз, пока маятник не перейдет через нулевое положение. При этом изменится полярность тока разбаланса (фиг. 2а, кривая Т-з) , а вместе с ним и импульсов на входеч ждущего мультивибратора 21. Последни возвращается в исходное состояние и открывает ключ 18 и регулирующий элемент 17. По обмотке микродвигателя протекает ток в прямом направлени с амплитудой, пропорциональной току разбаланса фотоэлементов 1,3, и проис ходит плавный возврат маятника i ну левому положению, как было описано выше. Таким образом обеспечивается плавный подход к нулю только с одной стороны, что устраняет влияние люфта микровинта б на точность измерения. Отсчет числа оборотов вала микродвигателя производится также, каки гравиметре ГС-110, с помощью счетчик 1, соединенного импульсным датчиком 9, а положение маятника сигнализируе ся индикатором нуля 3, подключенным к усилителю 15 тока разбаланса фотоэлементов 13. Свведением элементов автоматической компенсации изменения силы тяжести в скважинный снаряд отпадает необходимость в дополнительных жилах кабеля связи для ручного регулирования скорости вращения микродвигателя . при установке нуля.|Кроме того, в схему гравиметра введен стабилизатор напряжения 22 питания осветительной лампочки, что в свою очередь ийключает необходимость выделения самостоятельных жил для ее питания и сокращает число жил кабеля связи до трех, что повышает экономическую эффективность гравиметрических работ. Формула изобретения Автоматизированный скважинный гравиметр, содержащий счетчик оборотов, соединенный с импульсным датчиком, индикатор нуля, источник питания, гравиметр с микродвигателем и фотоэлементами, отличающийся, тем, что, с целью повышения точности измерения и надежности работы, в гравиметр введены модулятор, усилитель, демодулятор, регулирующий элемент, ждущий мультиви-братор, два возвратных. И один блокировочный ключиц причем ,д микродвигатель подключен к источнику питаййя через возвратные и блокировочный ключи и регулирующий элемент, вход которогочёр еэ демодулятор, усилитель и модулятор соединен с выходом фотоэлементов, а входы возвратных ключей и блокировочного ключа с регулирующим элементом попарно. подключены к противоположным выходам ждущего мультивибратора, вход которого соединен с выходом усилителя и индикатора нуля. Источники информации, принятые во внимание при экспертиза 1.Авторское свидетельство СССР 167045, кл. G 01 V 7/02, 1959. 2.Разведочная геофизика , 69, 1975, с. 120 (прототип).
ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный скважинный гравиметр | 1980 |
|
SU890340A1 |
| Скважинный гравиметр | 1981 |
|
SU1062633A1 |
| Гравиметр | 1983 |
|
SU1166041A1 |
| Гравиметр | 1982 |
|
SU1117562A1 |
| Скважинный гравиметр | 1981 |
|
SU1075213A1 |
| Гравиметр | 1981 |
|
SU966553A1 |
| Сейсмометр | 2019 |
|
RU2717168C1 |
| Сейсмометр | 2020 |
|
RU2738732C1 |
| Телеуправляемый кварцевый гравиметр | 1982 |
|
SU1092455A1 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |