/
О К
Фаг.
2, ПрвчОиразователь по п. 1, отличающийся тем, что, с целью упрощения конструкции, подвижный регулятор выполнен в виде двух цнливдрических цолых магнитных экранов, вращающихся относительно друг друга, на внутренней стороне одного из которых закреплен постоянньш магнит, а на другом - датчик магнитного поля.
3« Преобразователь по п. 1,. о тли чающийся тем, что, с целью расширения диапазона измерений подвижный регулятор выполнен в ципивдрического полого магнитного
экрана с окном на боковой поверхно- : сти, внутри которого раэмещен датчик магнитного поля.
4. Преобразователь по п. 1, отличающийся тем, что, с целью повышения точности измерений, подвижный регулятор выполнен в виде диска, на котором по периметру закреплено четное число постоянных магнитов, намагниченных; во взаимно противоположных направленийх, а датчик магнитного поля укреплен между двумя неподвижными полюсными наконечниками магнитной системы.

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНОЕ ИНТЕГРАЛЬНОЕ МАГНИТОПОЛУПРОВОДНИКОВОЕ УСТРОЙСТВО | 2005 |
|
RU2280917C1 |
| Магнитострикционный автогенератор | 1981 |
|
SU1007180A1 |
| Тензодатчик (его варианты) | 1983 |
|
SU1138672A1 |
| Преобразователь угла поворота вала в число импульсов | 1977 |
|
SU696518A1 |
| Способ определения углового положения образца в радиоспектрометре | 1977 |
|
SU721665A1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК МАГНИТНЫХ ПОЛЕЙ | 2001 |
|
RU2202115C2 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2142116C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ ОКСИДНЫХ КОМПОЗИЦИЙ И СОЛЕЙ В ЖИДКОЙ И ТВЕРДОЙ ФАЗАХ | 1998 |
|
RU2134417C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
1. ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ, содержащий магнитную систему и датчик магнитного поля, отличающийся тем, что, с целью повышения точности, расщирения пределов измерений и упрощения конструкции, датчик магнитного поля выполнен на основе магнитострикционного микрорезонатора из монокристалла антиферромагнетика с анизотропией типа легкая плоскость и размещен в зазоре магнитной системы, содержащей постоянный магнит и имеющей подвижный регулятор изменения составляющей напряженности магнитного поля на базисную плоскость кристалла. (Л с
1
Изобретение относится к области электрических измерений угловых перемещений и может быть использовано в автоматике, телемеханике и приборостроении.
Цель изобретения - расширение пределов и увеличение точности измерени и упрощение конструкции преобразователя угловьк перемеп(ений за счет использования в датчике магнитного поля эффекта резкой зависимости скорости звука в монокристаллах антиферромагнетиков с анизотропией типа легкая плоскость (в качестве материала может быть использован пример гематит или борат железа FeBOj) от величины составляющей напряженности внешнего магнитного поля на базисную плоскость кристалла, а также определенным выполнением подвижного регулятора изменения составляющей на базисную плоскость кристалла датчика
На фиг, 1 показан преобразователь угловых перемещений с подвшкным регулятором составляющей напряженности магнитного поля; на фиг, 2 то же, экранированием подвижным регулятором; на фиг, 3 - то же, с нониусным подвижньЕм регулятором.
Преобразователь угловых, перемещений (фиг. 1) содержит подвижный регулятор, выполненный из 2-х магнитных экранов 1 и 2 в виде цилиьщрических полых стаканов из магнито1-1Яг: ого материала вращающихся друг
относительно друга, постоянного магнита 3, например из материала SmCoj-, расположенного на внутренней стороне экрана 1, датчика 4 магнитного поля 5 на основе магнитострикционного микрорезонатора из антиферромагнетика с анизотропией типа легкая полость, жестко закрепленного с помощью стойки 5 на экране 2.
Магнитострикционный резонатор является составной частью устройства для измерения магнитной индукции и состоит из сердечника внутри медной рамки, выполненного в виде пластины,
5 параллельной базисной плоскости .- кристалла антиферромагнетика (например, монокристалла гематита), закрепленного в геометрическом центре большой грани к корпусу медной рамки с помощью жесткого стерж 1я, а также из индукционных обмоток возбуждения и съема акустических резонансньпс колебаний сердечника (за счет прямого и обратного эффекта магнито стрикции), расположенных на медной рамке,
Для сердечника резонатора в форме диска с радиусом R (порядка 2-3 мм) зависимость резонансной-частоты w от величинь составляющей подмагничивающего поля Н на базисную плоскость кристалла определяется выражением
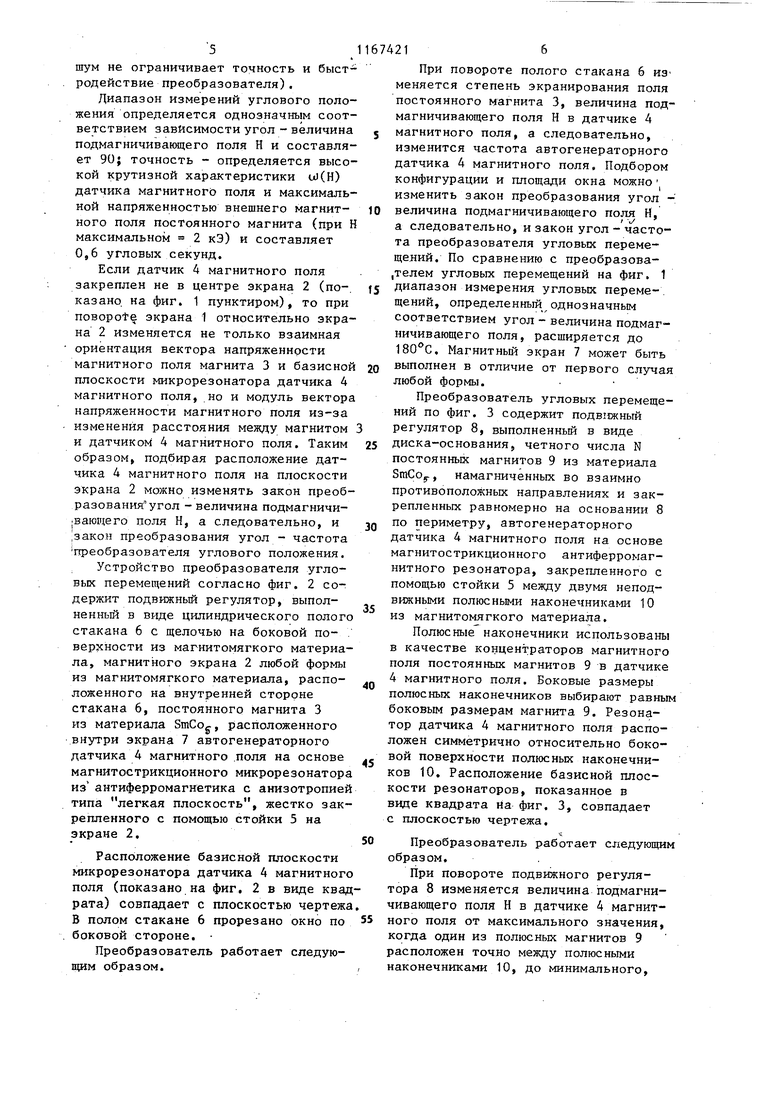
01 2,36 R- Ci-./ fefc -С 2.)С г,,(и)зо/) «12 H.E(2B,) /МоС,( u)j, /j.) модули упругости кристалл плотность кристалла; напряженность эффективног обменного поля; эффективное поле спонтанн стрикцки; магнитоупругая постоянная кристалла; частота антиферромагнитно резонанса. «50 (Н+Нд) - поле Дзялошинского; -у - гидромагнитное отношение. Экспериментально peaj7n3OBaHbi сле дующие параметры магнитострикционно резонатора: перестройка резонансной частоты в 1,7 раза в диапазоне подмагничивающих полей от II 30 Э до Н 2 кЭ, добротность до 10, частотный диапазон работы 100-1 МГц коэфе1)ициент, магнитомеханической свя зи, характеризующий эффективность индукционного возбуждения, до 3%. Закон управления ш(Н) имеет безгистерезисный характер. Резонатор сохраняет свои параметры при неоднородности подмагничивающего поля Н до 90% на 0,5 см. Расположение бази ной плоскости монокристалла резонатора (фиг, 1) в виде квадрата совпа дает с плоскостью чертежа. Датчик магнитного поля выполнен по автогр.нераторной схеме. При изме нении подмагничивающего поля Н, от 30 Э до 2 кЭ частота автоколебаний изменяется в 1,7 раза. Высокая стабильность частоты автоколебаний (менее 10 ) обеспечивается большой акустической добротностью резонатор включенного в цепь положительной обратной связи автогенератора. Внешнее подмагничивающее поле в преобразователе угловых перемещений создается постоянным магнитом из материала SmCog, размером 5x10x10 мм который обеспечивает максимальную магнитную индукцию в датчике магнитного поля до 0,2 Тл, Преобразователь угловых перемещеНИИ работает следуюищм образом. 214 При повороте экрана 1 относительно экрана 2 изменяется ориентация вектора напряженности магнитного поля магнита 3 относительно базисной плос- кости кристалла датчика 4 магнитного поля. Соответственно изменяется составляющая подмагничивающего поля Н, параллельная базисной плоскости кристалла резонатора датчика 4 магнит-ного поля от максимальной (порядка 2 кЭ) при взаимно коллениарной ориентации до минимальной (порядка 30 Э) при взаимно ортогональной ориентацни, а также изменяется частота автогенераторной схемы датчика 4 магнитного поля в 1,7 раза, Внешнее помеховое магнитное поле фактически не ограничивает чувствительность и точность измерения углового положения, поскольку появляется возможность использовать высокоэффективные магнитные экраны от внешних (датчик магнитного поля работает в сильно неоднородных полях), а также возможность увеличить максимальную напряженность магнитного поля, создаваемзпо постоянным магнитом более чем на порядок по сравнению с магнитной системой на кольцах Гельмгольца (соответственно возрастает чувствительность преобразова- теля углового положения). Использование малогабаритного постоянного магнита позволяет упростить функциональную схему и конструкцию магнитной системы преобразователя угловых перемещений, при этом исключается прецизионный источник питания магнитной системы, а также отпадает необходимость функционального усложнения преобразователя для коьшенсации внешних магнитных помех. Кроме того, снимается ограничение . на диапазон измерений углового положения, поскольку датчик магнитного поля может работать в сильно неоднородны : магнитных полях, а сильная связь с внешними электрическими цепями магнитострикционного MiiKpoрезонатора из антиферромагнетика (коэффициент магнитомеханической связи 3%) позволяет упростить схему активного элемента автогенераторного атчика магнитного поля (требуется однотранзисторный апериодический усилитель с коэффициентом усиления порядка 10, автогенератор имеет узкую спектральную линию и соотношение сигнал/ шум не ограничивает точность и быстродействие преобразователя). Диапазон измерений углового положения определяется однозначнь м соответствием зависимости угол - величина подмагничивающего поля Н и составляет 90} точность - определяется высокой крутизной характеристики ui(H) датчика магнитного поля и максимальной напряженностью внешнего магнитного поля постоянного магнита (при Н максимальном 2 кЭ) и составляет 0,6 угловых секунд. Если датчик 4 магнитного поля закреплен не в центре экрана 2 (по-, казано. на фиг. 1 пунктиром), то при noBopote экрана 1 относительно экрана 2 изменяется не только взаимная ориентация вектора напряженности магнитного поля магнита 3 и базисной плоскости микрорезонатора датчика 4 магнитного поля, но и модуль вектора напряженности магнитного поля из-за изменения расстояния между магнитом и датчиком 4 магнитного поля. Таким образом, подбирая расположение датчика 4 магнитного поля на плоскости экрана 2 можно изменять закон преобразования угол - величина подмагничи|Вающего поля Н, а следовательно, и |закон преобразования угол - частота преобразователя углового положения. Устройство преобразователя угловых перемещений согласно фиг. 2 содержит подвижный регулятор, выполненньш в виде цилиндрического полого стакана 6 с щелочью на боковой поверхности из магнитомягкого материала, магнитного экрана 2 любой формы из магнитомягкого материала, расположенного на внутренней стороне стакана 6, постоянного магнита 3 из материала SmCo, расположенного внутри экрана 7 автогенераторного датчика 4 магнитного .поля на основе магнитострикционного микрорезонатора из антиферромагнетика с анизотропией типа легкая плоскость, жестко закрепленного с помощью стойки 5 на экране 2. Расположение базисной плоскости микрорезонатора датчика 4 магнитног поля (показано на фиг, 2 в виде квад рата) совпадает с плоскостью чертеж В полом стакане 6 прорезано окно по боковой стороне. Преобразователь работает следующим образом. При повороте полого стакана 6 из меняется степень экранирования поля постоянного магнита 3, величина подмагничивающего поля Н в датчике 4 магнитного поля, а следовательно, изменится частота автогенераторного датчика 4 магнитного поля. Подбором конфигурации и площади окна можно изменить закон преобразования угол величина подмагничивающего поля Н, а следовательно, и закон угол - частота преобразователя угловых перемещений. По сравнению с преобразова,телем угловых перемещений на фиг. 1 диапазон измерения угловых переме-. щений, определенный однозначным соответствием угол - величина подмагничивающего поля, расширяется до 180°С. Магнитный экран 7 может быть выполнен в отличие от первого случая любой формы. Преобразователь угловых перемещений по фиг. 3 содержит подвтмсный регулятор 8, выполненньй в виде диска-основания, четного числа N постоянных магнитов 9 из материала SmCo, намагниченных во взаимно противоположных направлениях и закрепленных равномерно на основании 8 по периметру, автогенераторного датчика 4 магнитного поля на основе магнитострикционного антиферромагнитного резонатора, закрепленного с помощью стойки 5 между двумя неподвижными полюсными наконечниками 10 из магнитомягкого материала. Полюсные наконечники использованы в качестве концентраторов магнитного поля постоянных магнитов 9 в датчике 4 магнитного поля. Боковые размеры полюсных наконечников выбирают равным боковым размерам магнита 9. Резонатор датчика 4 магнитного поля расположен симметрично относительно боковой поверхности полюсных наконечников 10. Расположение базисной плоскости резонаторов, показанное в виде квадрата на фиг. 3, совпадает с плоскостью чертежа. Преобразователь работает следующим образом. При повороте подвижного регулятора 8 изменяется величина подмагничивающего поля Н в датчике 4 магнитного поля от максимального значения, когда один из полюсных магнитов 9 расположен точно между полюсными наконечниками 10, до минимального. когда площади перекрытия между полюсными наконечниками 10 и двумя постоянными магнитами 9 одинаковы. Повороту подвижного регулятора ka угол 360 соответствует число полых периодов изменения подмагншгивающего поля Н в датчике магнитного поля N раз. По сравнению с преобразователями угловых
6 -. 11 218 перемещений, представленными на фиг. 1 и 2, точность измерения углового положения увеличивается в N раз. Для измерения углового положения в пределах 360° регулятор соединяется с грубым датчиком углового положения, имеющего низкую точность йдиапазон измерения угла в диапазоне 360°.
в
| Кудрявцев В.Б., Лысенко А.П., Тищенко Н.М | |||
| Прецизионные преобразователи электрических сигналов и угловых перемещений на принципах квантовой магнитометрии | |||
| М., Энергия, 1977 | |||
| Кудрявцев В.В., Лысенко А.П., Милохин Н.Т., Тищенко Н.М | |||
| Прецизионные частотные.преобразователи автоматизированных систем контроля и управления | |||
| М., Энергия, 1974. |
