Изобретение относится к области неразрушающего контроля и может быть использовано для обнаружения дефектов потери металла и растрескиваний в стенках труб непосредственно в процессе проведения переизоляции трубопроводов.
Известен «Инспектирующий снаряд для наружного обследования трубопровода» (External Pipeline Inspection Tools) британской фирмы “Ad-veced Engineering Solutions LTD" [Рекламный лист “External Pipeline Inspection Tools”, IS 51 January 2007, “Adveced Engineering Solutions Limited”.]. В известном устройстве для неразрушающего контроля (НК) используется магнитный метод. Устройство позволяет обнаруживать наружную и внутреннюю коррозию. Известное устройство состоит из рамы некоторой ограниченной длины, электромагнитного поискового модуля, переносного компьютера, радиоканала для связи аппаратуры поискового модуля с компьютером и размещенного на грунте источника электрического тока. Обследование труб большого диаметра ведется по сегментно после удаления изоляционного покрытия. Для проведения НК рама крепится двумя бандажными ремнями на трубе. На раму устанавливается поисковый модуль. После включения электропитания от наружного источника тока устанавливается связь электронного оборудования с компьютером, и электромагнитный поисковый модуль вручную перемещается вдоль рамы. Собранная от датчиков поискового электромагнитного модуля информация передается в переносный компьютер, просматривается оператором и сохраняется в памяти компьютера. Затем бандажные ремни ослабляются, и рама смещается вручную параллельно самой себе на другой сегмент трубы. Так обследуется конкретный участок трубы. Затем программно формируется картина расположения магнитных аномалий на обследованном участке. Недостатком известного устройства является низкая производительность контроля и большой объем ручного труда в проведении обследования труб большого диаметра.
Известен наружный сканирующий дефектоскоп фирмы «Oceaneering» [Рекламные документы фирмы «Oceaneering», www.oceaneering.com], предназначенный для контроля состояния стенки трубы открытого и доступного со всех сторон трубопровода. Известный дефектоскоп позволяет выявлять дефекты кольцевых швов на трубопроводах большого диаметра, проложенных под водой или открыто на суше. Известное устройство состоит из тележки, несущей ультразвуковую поисковую систему. Тележка удерживается специальным бандажом в зоне кольцевого шва и специальным приводом перемещается по окружности трубы около контролируемого шва. Недостатком известного устройства является необходимость перемещения его с одного контролируемого шва на другой путем демонтажа и повторного монтажа. Кроме того, известное устройство не позволяет сканировать всю поверхность стенки трубы. Известен также комплекс для наружного обследования трубопроводов «Robotic Pipe Scanner (RPS)» фирмы ROSEN. Известный комплекс позволяет контролировать состояние стенок трубопровода, извлеченного из грунта на наличие дефектов потери металла и растрескиваний. В устройстве для неразрушающего контроля используется метод оценки растекания магнитного поля (MFL). Устройство состоит из самодвижущегося сканирующего инспектирующего узла, пульта дистанционного управления и анализатора на базе ноутбука. Связь между сканирующим узлом, пультом дистанционного управления и анализатором организована по радиоканалу. Самодвижущийся инспектирующий узел состоит из группы магнитных поисковых блоков, которые для обеспечения сплошности контроля размещены по периметру окружности контролируемой трубы на специальной раме, снабженной приводом с колесной ходовой частью. Самодвижущийся инспектирующий узел перемещается по трубе продольно. Обеспечение 100% контроля поверхности цилиндра трубы обеспечивается за счет большого количества магнитных поисковых блоков системы неразрушающего контроля.
Положительным свойством известного устройства является высокая точность оценки размеров наружных и внутренних дефектов благодаря использованию хорошо освоенного фирмой магнитного метода контроля. Недостатком известного устройства является его большая масса и высокая цена из-за большого количества магнитных поисковых узлов с постоянными магнитами. Наиболее близким к предлагаемому является «Устройство для наружного контроля коррозионного состояния и растрескивания стенок труб непосредственно в ходе переизоляции трубопровода» [Губанок И.И., Митрохин М.Ю., Морозов А.К., Синев А.И., Братчиков Д.Ю. Отбраковка труб в процессе капитального ремонта с применением комплекса внешнетрубной дефектоскопии ДНС 1000-1400. Третья международная конференция «Обслуживание и ремонт газонефтепроводов». // Сб. докладов и сообщений - г. Сочи, октябрь 2006 г. - Вып.2. - М.: ООО «Геоинформмарк», 2007. - 163 с. Стр. 14-21., “Голубая магистраль” №17 (1028) от 16 мая 2006, “Дефектоскопы для газовой трассы». Известное устройство состоит из сегментированной стальной рамы, дизель-электрического генератора, продольного магнитного сканера с постоянными магнитами, поперечного магнитного сканера с постоянными магнитами, привода поперечного движения, привода продольного движения, рулевого колеса, привода рулевого колеса, блока электроники с системами управления приводом и обработки датчиковой информации, противовеса для придания нижней маятниковости неподвижной части устройства. Поперечный привод состоит из электродвигателя, первого редуктора оборотов и силового редуктора оборотов, состоящего из малого зубчатого колеса и большого разъемного зубчатого колеса. К большому разборному зубчатому колесу крепятся две колесные тележки. Первая четырехколесная тележка несет магнитную поисковую систему, которая обеспечивает продольное намагничивание стенки трубы и формирование электрических сигналов о величине магнитного поля, рассеиваемого около стенки трубы в зоне контроля.
Вторая четырехколесная тележка несет магнитную поисковую систему, которая обеспечивает поперечное намагничивание стенки трубы и формирование сигналов, пропорциональных напряженности магнитного поля, рассеиваемого в зоне контроля около стенки трубы. Противовес и рулевое колесо обеспечивают удержание рамы с дизель-электрическим генератором в вертикальном положении. Колеса продольного привода через соответствующие редукторы оборотов электрических двигателей обеспечивают необходимую скорость перемещения устройства вдоль трубопровода. Величина продольного и поперечного перемещений измеряется колесными одометрами. Собираемая датчиками информация поступает в электронный блок, который по радиоканалу передает данные в переносный компьютер. Достоинством известного устройства является малая зависимость качества контроля от чистоты поверхности наружной стенки контролируемой трубы, что обеспечивает возможность работы непосредственно между очистной и изолирующей машинами одновременно с ними. Недостатки известного устройства: большая металлоемкость, большая трудоемкость при изготовлении, большой вес, а также необходимость использования тяжелой грузоподъемной техники при установке устройства на контролируемом трубопроводе, отсутствие возможности сортировки сигналов обнаруживаемых дефектов на внутренние и наружные непосредственно по записанным сигналам без предварительного визуального просмотра проконтролированных участков трубы. Цель изобретения - создание диагностического устройства для наружного контроля трубопроводов с возможностью программно-аппаратной сортировки сигналов наружных дефектов от сигналов внутренних дефектов в диалоговом режиме работы оператора с ЭВМ, с минимальной трудоемкостью изготовления подвижной части диагностического устройства, с весом устройства, позволяющим вести установку подвижной части диагностического аппарата на трубопроводе без использования тяжелой грузоподъемной техники и обеспечивать оптимальное намагничивание стенки обследуемой трубы. Указанная цель достигается тем, что в известное устройство, содержащее сегментированную стальную раму, опорные колеса, ходовые колеса, ходовой привод, дизель-электрический генератор, магнитную поисковую систему продольного намагничивания, магнитную поисковую систему поперечного намагничивания, колесный одометр, устройство сбора датчиковой информации, бортовую электронную аппаратуру, переносный компьютер, радиоканал обмена информацией между бортовой электронной аппаратурой и переносным компьютером, введены первая и вторая группы ведущих электродвигателей, система вихретоковых преобразователей неразрушающего контроля, узел изменения намагниченности стенки трубы, корзина на маятниковом подвесе в соответствующем звене сегментированной рамы, вращающиеся электрические контактные системы, первая и вторая упругие сцепки, причем магнитные поисковые системы выполнены:
1) с использованием постоянных магнитов, с механической регулировкой намагниченности изменением зазора между контролируемой стенкой трубы и полюсами магнитной поисковой системы благодаря перемещению с помощью, например, винтовых домкратов поисковой системы радиально относительно рамы звена сегментированной рамы, на котором размещена магнитная поисковая система;
2) с использованием электромагнита с регулировкой напряженности магнитного поля изменением тока в катушках магнитной поисковой системы, а ходовой привод состоит из четного количества, например, четырех колес, и четного количества, например, четырех электромоторов с редукторами и тахогенераторами; дизель- электрический генератор помещен в корзину на маятниковом подвесе, а электрический ток от электрического генератора передается из корзины через вращающиеся электрические контакты, причем магнитные поисковые системы размещены на диаметрально противоположных звеньях сегментированной рамы, а вихретоковая поисковая система размещена на звене сегментированной рамы, где минимально действие магнитных полей магнитных поисковых систем; ходовые колеса размещены группами с левой и с правой сторон сегментированной рамы на звеньях сегментированной рамы, диаметрально противоположных относительно обследуемой трубы, причем плоскости вращения дисков ходовых и опорных колес повернуты относительно соответствующих радиусов плоскости поперечного сечения трубы так, чтобы за один оборот сегментированной рамы вокруг трубы ее продольное смещение вдоль трубы равнялось требуемой ширине зоны контроля магнитных и вихретоковой поисковых систем, при этом опорные колеса магнитных поисковых систем установлены на самоориентирующихся опорах, а валы ходовых колес соединены с выходными валами соответствующих редукторов оборотов ходовых электродвигателей, электрические выводы тахогенераторов которых соединены с соответствующими входами для сигналов обратной связи соответствующего блока управления двигателем, а входы для сигналов задания требуемой скорости блоков управления двигателями соединены с соответствующими выходами интерфейсного узла бортового компьютера, интерфейсные выводы внешнего обмена которого соединены с соответствующими выводами бортового радиомодема, а интерфейсные выводы компьютера, предназначенные для ввода датчиковой информации и вывода управляющих команд соединены с соответствующими выводами узла изменения режимов и сбора датчиковой информации, сигнальные входы которого соединены с соответствующими выводами датчиковых узлов магнитных поисковых систем и с соответствующими выводами вихретоковой системы неразрушающего контроля, а интерфейсные входы бортового компьютера, предназначенные для приема сигналов пройденного пути, соединены с соответствующими выводами системы путеизмерения; интерфейсные входы бортового компьютера, предназначенные для приема сигналов угловой ориентации, соединены с соответствующими выводами системы угловой ориентации, а интерфейсные выводы бортового компьютера, предназначенные для управления движением наружного сканирующего дефектоскопа, соединены с соответствующими входами соответствующего блока управления соответствующим ходовым двигателем, причем интерфейсные выводы второго радиомодема соединены с соответствующими интерфейсными выводами переносного компьютера.
Предлагаемый «Наружный сканирующий дефектоскоп» вызван практической необходимостью обеспечения диагностики технического состояния стенок газопроводов непосредственно в ходе их переизоляции, и принятия оперативных мер по ремонту открытой, неизолированной трубы. Совмещение переизоляции трубопровода с неразрушающим контролем сокращает финансовые затраты и ускоряет ввод трубопровода в коммерческую эксплуатацию, что является подтверждением промышленной применимости устройства. Изобретение поясняется чертежами. На Фиг.1 показаны кинематические схемы подвижной части устройства. На Фиг.2а и Фиг.2в поясняется конструкция магнитных поисковых систем продольного намагничивания (Фиг.2а) и поперечного намагничивания (Фиг.2в) с постоянными магнитами. На Фиг.3а и Фиг.3в схематически показано устройство магнитных поисковых систем с электромагнитом. На Фиг.3а показана магнитная поисковая система продольного намагничивания, а на Фиг 3в показана магнитная поисковая система поперечного намагничивания. На Фиг.4 показана функциональная схема информационно-управляющей части устройства. На Фиг.5 показана картина формируемой зоны сканирования стенки трубы поисковыми системами неразрушающего контроля.
Состав устройства: Подвижная часть устройства рассматривается на примере устройства с МПС на постоянных магнитах (Фиг.1). Подвижная часть устройства состоит из сегментированной рамы, собранной из нескольких, например пяти, веньев 1, опорных 2 и ходовых 3п и 3л колес, шарнирных соединителей 4, упругих соединителей 5, дизель-электрический генератора 6, противовеса 7, магнитной поисковой системы продольного намагничивания 8, магнитной поисковой системы поперечного намагничивания 9, регулировочных винтов 10, пружинных амортизаторов 11, вихретоковой системы неразрушающего контроля 12, блока электронной аппаратуры 13, электродвигателей 14 (в количестве равном числу ходовых колес), вращающейся контактной системы 15, кабеля силового питания 16, кабелей питания электродвигателей и датчиков МПС (не показаны), сигнальных кабелей (не показаны). Устройство может быть выполнено с различными вариантами исполнения магнитных поисковых систем (МПС):
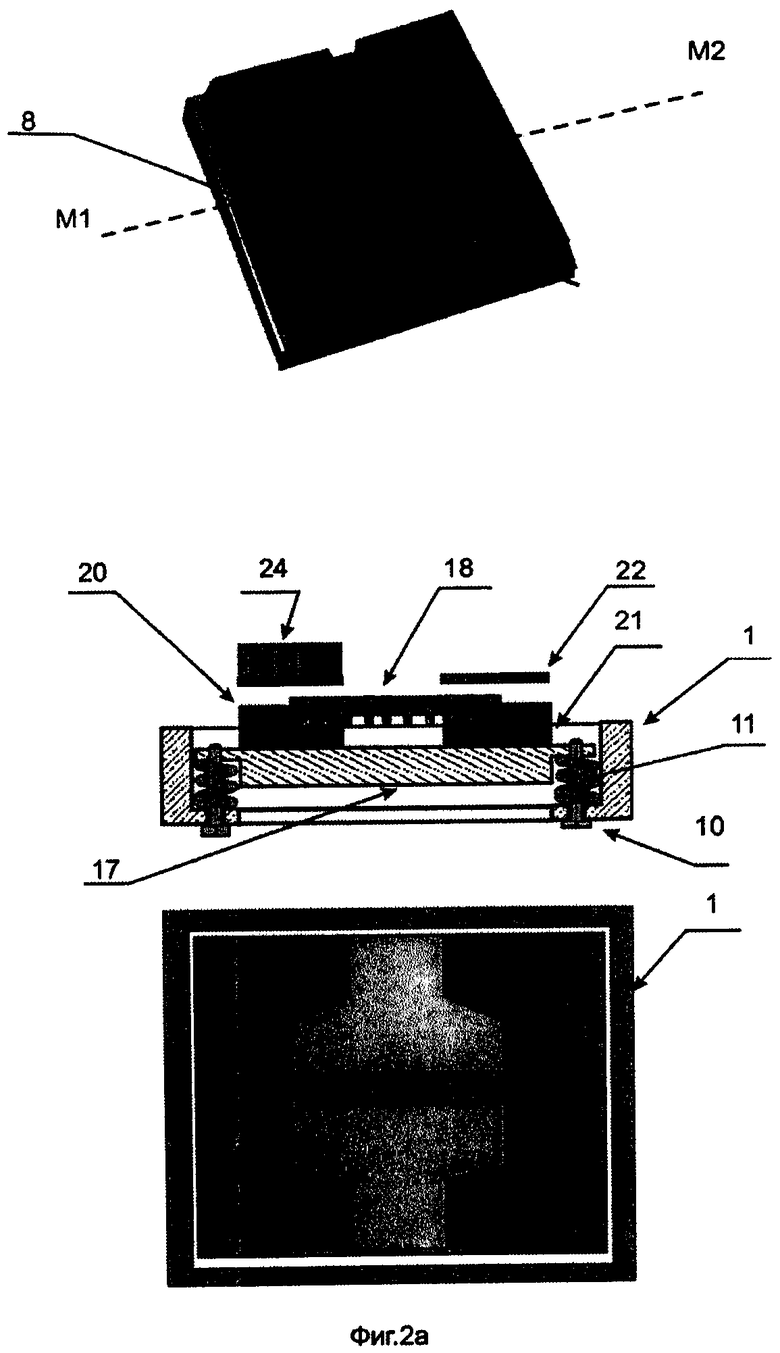
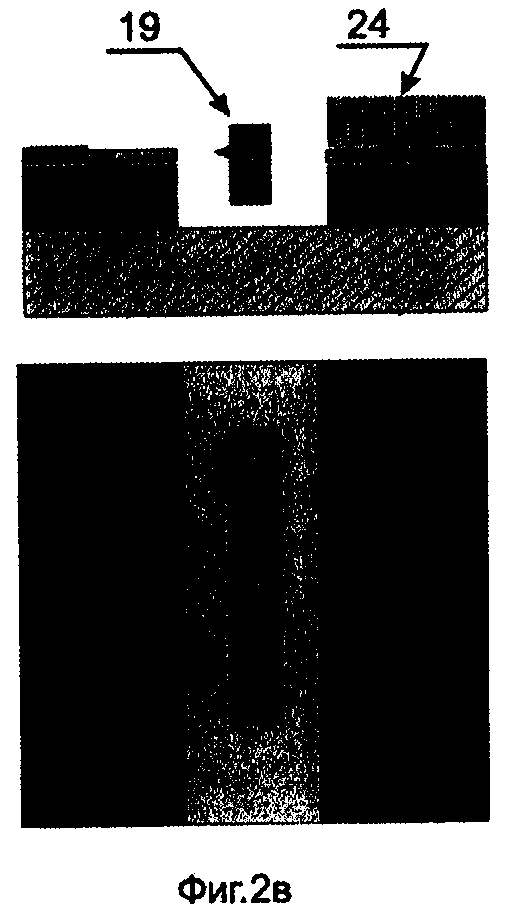
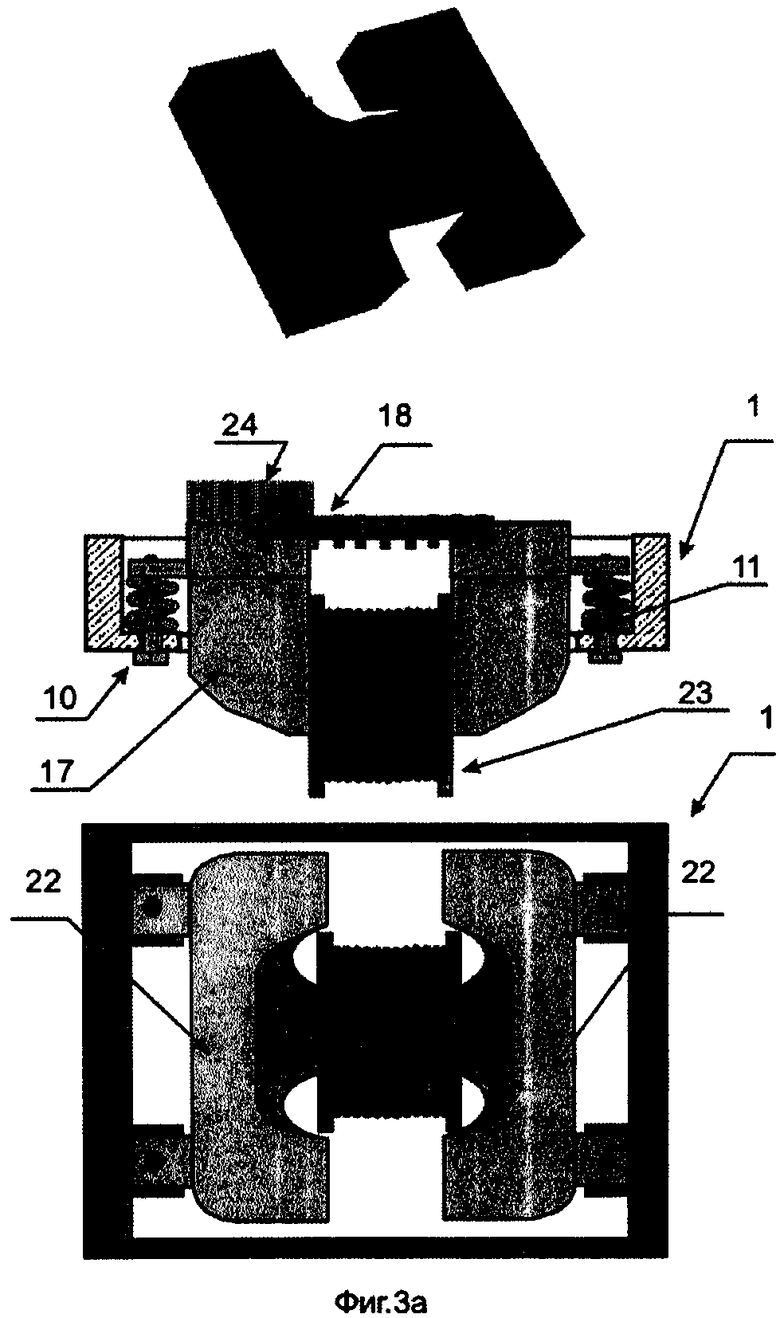
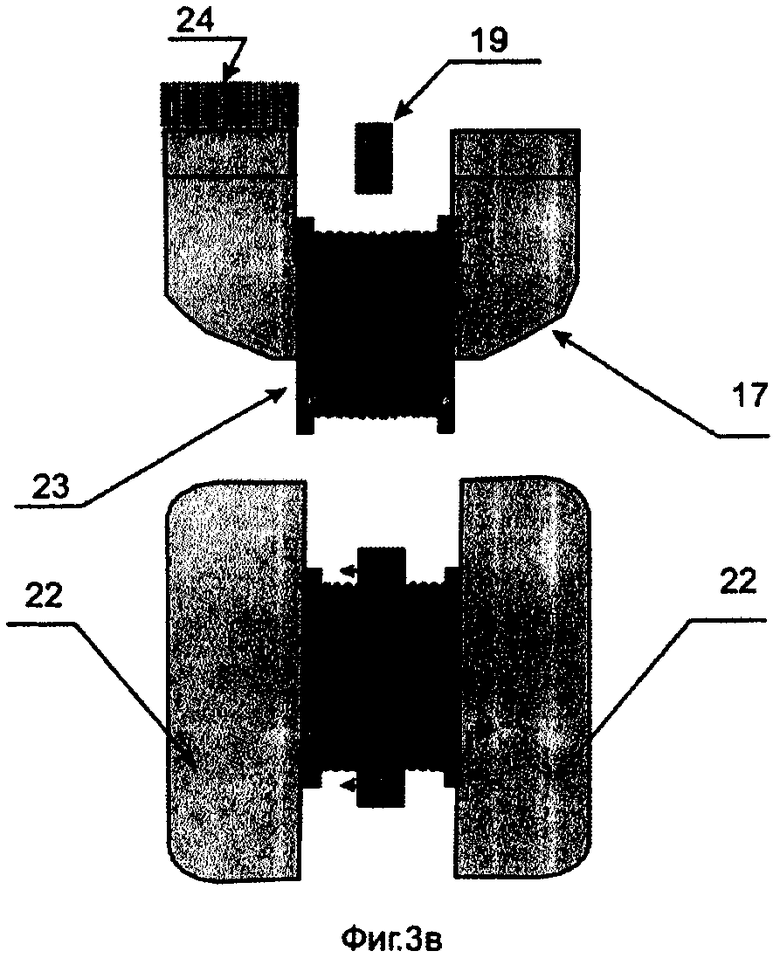
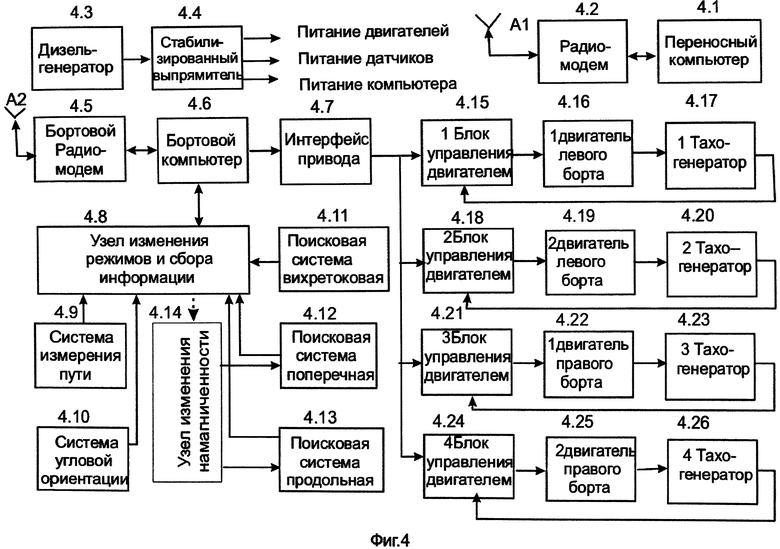
Вариант 1 - МПС с постоянными магнитами (Фиг.2а, Фиг.2в). Вариант 2 - МПС с соленоидами, формирующими магнитное поле при пропускании по катушке соленоида постоянного тока (Фиг.3а, Фиг.3в). На Фиг.1 показана кинематическая схема с использованием МПС с постоянными магнитами. На Фиг.2а схематически показано устройство МПС продольного намагничивания с постоянными магнитами. Здесь 17 - магнитопровод (ярмо), 20 - магниты южного полюса, 21 - магниты северного полюса, 22 - защитные накладки (полюсные наконечники), 18 - нтейнер с датчиками магнитного поля. Корпусная часть звена многосекционной рамы обозначена цифрой 1, винты регулировки зазора между стенкой контролируемой трубы (не показана) обозначены 10, пружины амортизаторов обозначены 11. Полюсные наконечники 22 могут снабжаться стальными щетками 24, которые, шунтируя воздушный зазор между полюсами и поверхностью стенки трубы, существенно снизят магнитное сопротивление между полюсами и трубой. Так как магнитная система может быть выполнена со щетками 24 и без щеток 24, то Фиг.2 и Фиг.3 щетка 24 показана условно только на одном из полюсов и только на видах сбоку. На Фиг.2в схематически показана возможная конструкция МПС поперечного намагничивания с постоянными магнитами. Здесь контейнер датчиков магнитного поля обозначен цифрой 19. Остальные элементы конструкции аналогичны показанным на Фиг.2а. В обоих МПС датчики магнитного поля размещены так, чтобы ось чувствительности датчика (показана маленькой стрелкой на каждом датчике) была ориентирована по направлению магнитного поля МПС. В каждой МПС могут быть применены не только одноосные датчики магнитного поля, но и трехкомпонентные датчики магнитного поля, т.е. фактически вместо каждого одноосного датчика устанавливаются три датчика оси, чувствительности которых ориентированы по трем ортогональным координатам. Это усложняет конструкцию, но позволяет повысить достоверность идентификации типа дефектов, породивших конкретную магнитную аномалию. На Фиг.3а схематически показана возможная конструкция МПС продольного намагничивания с соленоидом для формирования магнитного поля, где обозначены:17 - магнитопровод (ярмо), 18 - контейнер с датчиками магнитного поля, 23 - соленоид (катушка с проводом), 24 - возможный вариант применения как полюсных наконечников стальных щеток. На Фиг.3в схематически показана возможная конструкция МПС поперечного намагничивания с соленоидом для формирования магнитного поля. Здесь 17 - магнитопровод, 19 - контейнер с датчиками магнитного поля, 23 - соленоид, 24 - стальная щетка как возможный вариант полюсного наконечника. В обеих магнитных поисковых системах датчики магнитного поля размещаются так, чтобы направление осей их чувствительности совпадало с направлением поля намагничивающих систем. В этом варианте МПС также возможно применение трехкомпонентных датчиков магнитного поля для повышения достоверности идентификации дефектов при анализе магнитограмм. Информационно-управляющая часть устройства (Фиг.4) состоит из: переносного управляющего оборудования, представленного переносным компьютером, 4.1 и радиомодемом 4.2 с антенной A1; источника электроэнергии, представленного дизель-электрическим генератором 4.3 со стабилизированным выпрямителем 4.4 напряжений, необходимых для работы электропривода, магнитных поисковых систем, бортового вычислительно-цифрового оборудования, а также для питания датчиков и аналогового оборудования; бортового электронного оборудования, состоящего из: бортового радиомодема 4.5 с антенной A2, бортового компьютера 4.6, интерфейса привода 4.7, узла изменения режимов и сбора датчиковой информации 4.8, системы измерения пути 4.9, системы угловой ориентации 4.10, поисковой системы вихретоковой 4.11, поисковой системы поперечной 4.12 с магнитными датчиками для поиска дефектов с продольной ориентацией, поисковой системой продольной 4.13 с магнитными датчиками для поиска дефектов поперечной ориентации, первого 4.15, второго 4.18, третьего 4.21 и четвертого 4.24 блоков управления двигателями, первого 4.16 и второго 4.19 двигателей левого борта, первого 4.22 и второго 4.25 двигателей правого борта, первого 4.17, второго 4.20, третьего 4.23 и четвертого 4.26 тахогенераторов (возможно и другое количество двигателей и элементов, обеспечивающих стабилизацию скорости вращения и вращающих моментов двигателей).
Работает устройство следующим образом. Подвижную часть наружного сканирующего дефектоскопа устанавливается на трубу (не показана). Для этой цели разъединяют талрепы (не показаны) с упругими соединителями 5 от звена 1 сегментированной рамы и звена с противовесом 7. Затем раму раскладывают и по мосткам закатывают конструкцию магнитами вниз на верхнюю часть цилиндра инспектируемой трубы так, чтобы сегментированная рама с противовесом 7 и продольной поисковой системой 8 свешивалась вдоль стенки трубы со стороны, противоположной размещению мостков, а дизель-электрический генератор 6 оказался наверху над трубой. Затем удаляют мостки, и звено 1 сегментированной рамы с поперечной магнитной поисковой системой 9 свешиваются со стороны мостков вдоль стенки трубы. Затем противовес 7 прижимают к нижней части трубы и соединяют через талреп и упругий соединитель 5 со звеном 1, на котором размещена продольная поисковая система 8. Труба становится охваченной по периметру сегментированной рамой с поисковыми системами 8, 9 и 12. Сегментированная рама при этом опирается о стенку трубы опорными колесами 2 и ходовыми колесами 3п и 3л. Магнитные поисковые системы с постоянными магнитами создают усилия, притягивающие боковые части устройства к трубе (Электромагнитные поисковые системы создадут усилия только после подачи электропитания, что существенно упрощает работу с электромагнитным вариантом поисковых систем). Известно, что усилие притяжения магнитных поисковых систем при использовании MFL метода превышают вес магнитной системы. Конструкция выполнена так, что массы продольной магнитной поисковой системы 8 равна массе поперечной магнитной поисковой системы 9 и притягивающие усилия магнитов обеих систем одинаковы, что достигается изменением зазора между полюсами МПС и стенкой трубы с помощью винтов 10 и пружин 11 (Фиг.1 и Фиг.2а). Одинаковость сил притяжения МПС и одинаковость их масс, а также одинаковость масс дизель-электрического генератора 5 и противовеса 7 обеспечивают сбалансированность конструкции относительно продольно оси трубы. Такая балансировка снижает требуемую мощность ходовых двигателей 14. После установки на контролируемом трубопроводе подвижной части сканирующего наружного дефектоскопа производится запуск дизель-электрического генератора 6. По истечении времени выхода генератора 6 на оптимальный режим напряжение питания от выводов генератора 6 через вращающуюся контактную систему 15 подается на бортовой компьютер и цифровую аппаратуру электронного блока 13. Включается переносный компьютер 4.1 (Фиг.4). С включенного переносного компьютера 4.1 (Фиг.4) выдается через радиомодем 4.2 и антенну A1 команда включить бортовую электронную аппаратуру подвижной части наружного сканирующего дефектоскопа. Бортовой компьютер 4.6 через бортовой радиомодем 4.5 и антенну A2 принимает команды от переносного компьютера 4.1. Бортовой компьютер 4.6 выдает необходимые управляющие сигналы в узел изменения режимов и сбора информации 4.8. Информация от вихретоковой 4.11, продольной 4.13 и поперечной 4.12 поисковых систем поступает в узел изменения режимов и сбора информации 4.8 и из него в бортовой компьютер 4.6. Из бортового компьютера 4.6, через бортовой радиомодем 4.5, антенну A2 данные по радиоканалу, антенну A1 и радиомодем 4.2 поступают в переносный компьютер 4.1. Инженер - оператор контролирует принятую информацию и оценивает напряженность магнитного поля, рассеиваемого на бездефектном участке трубы в зоне размещения магнитных поисковых систем продольного 4.13 и поперечного 4.12 намагничивания. При неоптимальности напряженности магнитного поля инженер-оператор выдает указания оператору-регулировщику о необходимости проведения регулировки. Если магнитные поисковые системы выполнены на постоянных магнитах (Фиг.2а, Фиг.2в), то оператор-регулировщик должен вращением регулировочных винтов 10 отдалить (для уменьшения напряженности поля) или приблизить к стенке трубы (для увеличения напряженности поля в стенке трубы) магнитную поисковую систему. Регулировочные винты перемещают радиально относительно трубы магнитную часть поисковой системы в направлении к трубе или от нее. При достижении желаемой величины магнитного поля настроечные винты фиксируются. Если магнитные поисковые системы электромагнитные (Фиг.3а, Фиг.3в), то инженер-оператор должен с переносного компьютера только указать толщину стенки трубы и оптимальное значение напряженности магнитного поля будет установлено автоматически бортовым компьютером 4.6. При выполнении этой задачи бортовой компьютер 4.6 выдает в узел изменения режимов и сбора информации 4.8 команды на изменение тока в катушке соленоида соответствующей настраиваемой магнитной поисковой системы. Узел изменения режимов и сбора информации 4.8 при исполнении полученной команды выдает управляющий сигнал в узел изменения намагниченности 4.14, который изменяет в нужную сторону ток в катушке соленоида электромагнита продольной 4.13 или поперечной 4.12 магнитных поисковых систем. Сигналы, пропорциональные величине поля рассеяния от магнитных датчиков соответствующих магнитных поисковых систем 4.12 и 4.13 поступают в узел изменения режимов и сбора информации 4.8, из которого считываются бортовым компьютером 4.6. При достижении напряженностью магнитного поля требуемой величины изменение тока в катушках соленоидов МПС бортовым компьютером 4.6 прекращается, бортовой компьютер 4.6 через радиомодем 4.5 и антенну A2 выдает по радиоканалу и антенну A1 и радиомодем 4.2 результат настройки в переносный компьютер 4.1. Инженер-оператор принимает решение о начале сканирования трубопровода. Для начала движения подвижной части наружного сканирующего дефектоскопа с переносного компьютера 4.1 через радиомодем 4.2 и антенну A1 выдается соответствующая команда в радиоканал. Из радиоканала через антенну A2, радиомодем 4.5 команда поступает в бортовой компьютер 4.6. Бортовой компьютер 4.6 после дешифрации команды выдает требуемые управляющие сигналы в Интерфейс привода 4.7. Интерфейс привода 4.7 формирует сигналы, соответствующие требуемой скорости движения, на блоки управления двигателями 4.15, 4.18, 4.21, 4.24. С указанных блоков управления двигателями поступают сигналы управления работой электродвигателей 4.16, 4.19, 4.22, 4.25 на их соответствующие выводы. (На кинематической схеме Фиг.1 эти двигатели обозначены цифрами 14). Вращение вылов двигателей 14 перелается через редукторы оборотов на ходовые колеса, размещенные с левой 3л и с правой 3п (Фиг.1) стороны сегментированной рамы. Благодаря действию упругих сцепок 5 и определенной гибкости сегментной рамы в ее шарнирах 4 и благодаря притягиванию к трубе магнитных поисковых систем 8 и 9 все ходовые колеса 3п и 3л, а также все опорные колеса 2 оказываются прижатыми к стенке контролируемой трубы (не показана). Вращение ходовых колес 3л и 3п приводит к вращению всей конструкции вокруг контролируемой трубы. Пусть в нашем случае (Фиг.1) это вращение происходит по часовой стрелке (то есть слева направо в сторону наблюдателя). Ходовые колеса 3л левой стороны должны вращаться с той же скоростью, что и ходовые колеса 3п с правой стороны. В противном случае начнется перекос всей конструкции относительно продольной оси трубы. Прочность сегментированной рамы не позволит ей сломаться, но обрезиненные обода колес 3л или 3п, которые вращаются быстрее, начнут быстро изнашиваться. Это приведет к увеличению эксплуатационных расходов наружного сканирующего дефектоскопа. Во избежание таких причин износа ходовых колес их скорость поддерживается одинаковой с помощью системы стабилизации скорости, образованной введение отрицательной обратной связи по скорости в систему управления приводом ходовых колес.
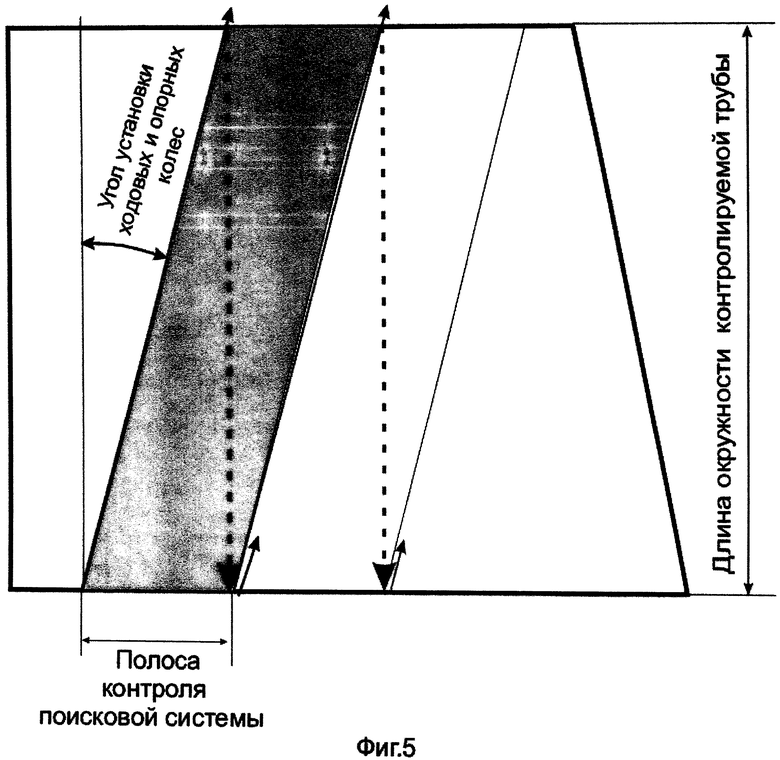
Отрицательная обратная связь по скорости обеспечивается благодаря (Фиг.4) тахогенераторам 4.17, 4.20, 4.23, 4.26, связанным с валами электродвигателей 4.16, 4.19, 4.22, 4.25. Выходные сигналы тахогенераторов заведены на соответствующие входы соответствующих блоков управления двигателем 4.15, 4.18, 4.21, 4.24. Вращающиеся с одинаковой скоростью ходовые двигатели 14 (Фиг.1) обеспечивают одинаковые скорости вращения ходовых колес 3л левой стороны и 3п правой стороны. Ходовые колеса 3л и 3п установлены под некоторым одинаковым углом к образующей окружности контролируемой трубы. При этом направление их качения установлено в сторону проводимого обследования. Такая установка обеспечивает одновременно с вращением всей конструкции вокруг обследуемой трубы также и перемещение наружного сканирующего дефектоскопа вдоль трубы. Зона, контролируемая поисковыми системами, представляет при этом плоскую спираль, намотанную на поверхность трубы с некоторым наложением одного витка полосы контроля на другой. Это необходимо для обеспечения сплошности контроля и устранения возможности неконтролируемых зон.
На Фиг 5. показана картина формируемой зоны сканирования стенки трубы поисковыми системами неразрушающего контроля. Требуемый угол φк установки направления качения колес может быть найден по известному диаметру трубы Dт и ширине Вд контейнера с датчиками поисковых систем:
φк=arctan((Вд-ΔВ)/Dт),
где ΔВ - требуемое наложение текущей зоны контроля на предыдущую. Возможная конструкция магнитной поисковой системы показана на Фиг 2а, Фиг.2в, Фиг.3а, Фиг.3в. Фиг3а отображает устройство МПС, используемой в данном «Наружном сканирующем дефектоскопе» для продольного намагничивания стенки трубы. Здесь 17 - это ярмо (магнитопровод), на котором установлены постоянные магниты, образующие южный полюс 20 и северный полюс 21. Сверху на магнитах установлены полюсные наконечники 22, выполняющие в данном случае функцию защиты постоянных магнитов от механических повреждений. При работе на трубах с утолщенной стенкой полюсные наконечником могут быть выполнены в виде щеток 24 с гибкими, например, из стальных тонких тросиков, щетинами. Магнитное сопротивление таких щеток существенно ниже, чем у воздуха. Это обеспечит попадание большей части магнитного потока в стенку трубы и позволит намагничивать стенку до больших значений магнитной индукции. Магниты на полюсах МПС продольного намагничивания имеют С-образную форму для обеспечения магнитного поля с мало изменяющейся напряженностью в зоне расположения датчиков магнитного поля, а именно в средней части магнитной системы вдоль оси М1-М2. В этом случае обеспечивается наибольшая концентрация поля между полюсами намагничивающей системы и его малое изменение на бездефектном месте в направлении от одного полюса к другому в середине магнитной системы. Вдоль оси М1-М2 установлены датчики магнитного поля, помещенные в полиуретановый (или из другого материала) контейнер 18. Оси чувствительности датчиков магнитного поля ориентируются по направлению магнитного поля намагничивающей системы. Магнитная система с датчиками может подниматься или опускаться относительно рамы, например с помощью винтов 10. Этим регулируется величина воздушного зазора между полюсами магнитов и стенкой обследуемой трубы. В случае если появится препятствие, выступающее в сторону полюсов МПС, поисковая система имеет возможность отойти от стенки трубы при сжатии пружин 11 под давлением на ее полюса со стороны встретившегося препятствия. На Фиг.2в показана поисковая магнитная система с постоянными магнитами, которая создает в данном наружном сканирующем дефектоскопе магнитное поле, направленное поперек продольной оси трубопровода по его окружности. Конструкция этой намагничивающей системы подобна конструкции рассмотренной для системы продольного намагничивания, за исключением того, что форма полюсов данной системы прямоугольная. На Фиг.3а представлена магнитная поисковая система продольного намагничивания, в которой магнитное поле формируется с помощью соленоида, питаемого током от дизель-электрического генератора, через электронный регулируемый стабилизатор тока, находящийся в узле изменения намагниченности 4.14 (Фиг.4) блока электронной аппаратуры 13 (Фиг.1). На Фиг.3а 17 - магнитопровод электромагнита, 22 - полюсные наконечники, 24 - стальные щетки (как вариант исполнения полюсных наконечников), 18 - контейнер с датчиками магнитного поля, 1 - корпус звена сегментированной рамы, 10 - винт регулировки радиального положения МПС относительно стенки трубы, 11 - пружина. Оси чувствительности датчиков магнитного поля ориентированы по направлению намагничивающего поля. Регулировка величины напряженности магнитного поля осуществляется изменением величины тока в катушке 23 соленоида электронными стабилизаторами тока в узле изменения намагниченности 4.14, управляемом сигналами из узла изменения режимов и сбора датчиковой информации 4.8 (Фиг.4). На Фиг.5в показана возможная конструкция магнитной поисковой системы поперечного намагничивания с формированием магнитного поля с помощью электромагнита. Здесь 17 - магнитопровод, 22 - полюсные наконечники, 23 - соленоид, 24 - стальные щетки, 19 - контейнер с датчиками магнитного поля. Оси чувствительности датчиков магнитного поля ориентированы вдоль направления магнитного поля магнитной системы. Процесс перемещения наружного сканирующего дефектоскопа по трубопроводу обеспечивается вращающим моментом электродвигателей 14, скорость которых стабилизируется системой стабилизации: блок управления двигателем 4.15 - двигатель 4.16 - тахогенератор 4.17 - блок управления двигателем 4.15. Все блоки управления двигателей 4.15 получают через интерфейс привода 4.7 от бортового компьютера 4.6 сигналы установки требуемого значения оборотов вращения двигателя и выдают необходимые управляющие сигналы в соответствующий двигатель. Так как все колеса (Фиг.1) 3п, 3л, 2 установлены так, что направление их качения образует некоторый угол к плоскости поперечного сечения трубы, то сегментированная рама со всеми закрепленными на ней блокам и узлами начинает вращаться вокруг трубы, одновременно перемещаясь вдоль нее. При этом магнитные поисковые системы 8, 9 и вихретоковая поисковая система 12 производят спиральное сканирование поверхности инспектируемой трубы. Сигналы названных поисковых систем, а также сигналы датчиков системы угловой ориентации 4.10 и сигналы системы измерения пути 4.9 передаются бортовым компьютером 4.6 по радиоканалу в переносный компьютер 4.1. В переносном компьютере 4.2 производится программная обработка данных и на экран дисплея переносного компьютера 4.1 выдается виртуальная картина развертки участка инспектируемой трубы с отображением обнаруженных аномалий и результаты их предварительно интерпретации. Оператор может в реальном масштабе времени, но с некоторым запаздыванием, принять решение о критичности обнаруженных дефектов и выдать соответствующее предупреждение ремонтным службам. Для прекращения движения наружного сканирующего дефектоскопа по трубопроводу инженер-оператор выдает с переносного компьютера 4.1. команду на остановку подвижной части дефектоскопа. Передача команды происходит по информационным путям, аналогично рассмотренным для начала процесса неразрушающего контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| МАГНИТОПОРОШКОВЫЙ ДЕФЕКТОСКОП | 2017 |
|
RU2653121C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| Способ проведения неразрушающего контроля цилиндрических объектов и автоматизированный комплекс для его реализации | 2020 |
|
RU2764607C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| ПРЕОБРАЗОВАТЕЛЬ МАГНИТНОГО ПОЛЯ | 2006 |
|
RU2324195C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| УСТРОЙСТВО ДЛЯ НАМАГНИЧИВАНИЯ СТЕНОК ТРУБ ДЕЙСТВУЮЩИХ ТРУБОПРОВОДОВ | 2006 |
|
RU2304279C1 |
Использование: для обнаружения дефектов. Сущность изобретения заключается в том, что наружный сканирующий дефектоскоп содержит сегментированную стальную раму, опорные колеса, ходовые колеса, ходовой привод, дизель-электрический генератор, магнитную поисковую систему продольного намагничивания, магнитную поисковую систему поперечного намагничивания, колесный одометр, устройство сбора датчиковой информации, бортовую электронную аппаратуру, переносный компьютер, радиоканал обмена информацией между бортовой электронной аппаратурой и переносным компьютером, при этом в него введены первая и вторая группы ходовых электродвигателей, группа вихретоковых преобразователей неразрушающего контроля, узел изменения намагниченности стенки трубы, корзина на маятниковом подвесе в соответствующем звене сегментированной рамы, вращающаяся электрическая контактная система, первая и вторая упругие сцепки, а также другие конструкционные элементы. Технический результат: упрощение конструкции подвижной части диагностического устройства, уменьшение веса устройства, а также обеспечение возможности программно-аппаратной сортировки сигналов наружных дефектов от сигналов внутренних дефектов в диалоговом режиме работы оператора с ЭВМ и обеспечение возможности оптимального намагничивания стенки обследуемой трубы. 3 з.п. ф-лы, 7 ил.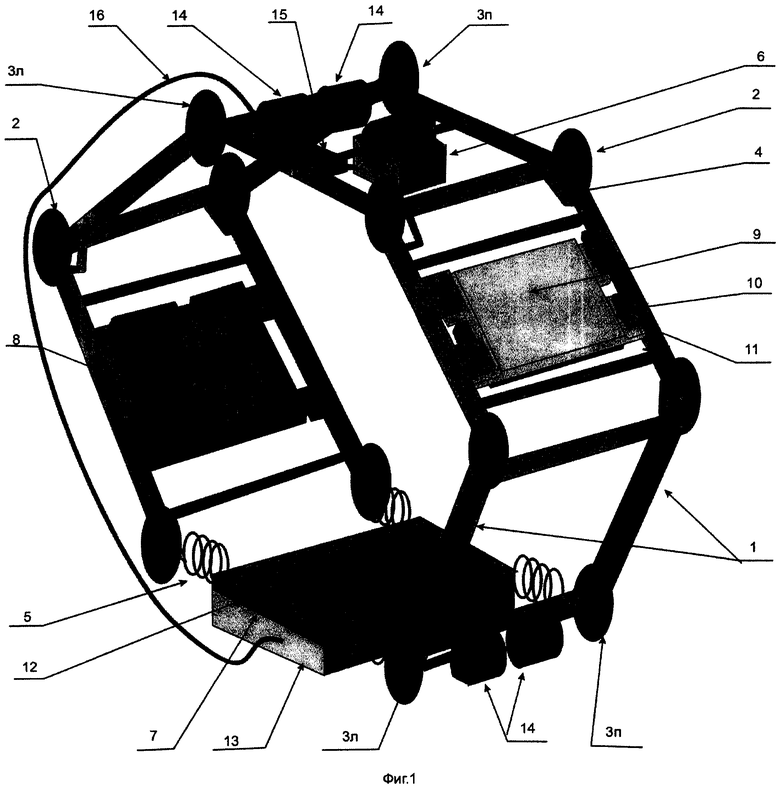
1. Наружный сканирующий дефектоскоп, содержащий сегментированную стальную раму, опорные колеса, ходовые колеса, ходовой привод, дизель-электрический генератор, магнитную поисковую систему продольного намагничивания, магнитную поисковую систему поперечного намагничивания, колесный одометр, устройство сбора датчиковой информации, бортовую электронную аппаратуру, переносный компьютер, радиоканал обмена информацией между бортовой электронной аппаратурой и переносным компьютером, отличающийся тем, что в него введены: первая и вторая группы ходовых электродвигателей, группа вихретоковых преобразователей неразрушающего контроля, узел изменения намагниченности стенки трубы, корзина на маятниковом подвесе в соответствующем звене сегментированной рамы, вращающаяся электрическая контактная система, первая и вторая упругие сцепки, причем ходовой привод состоит из четного количества колес, равномерно расставленных с левой и правой стороны сегментированной рамы, и такого же количества электромоторов с редукторами и тахогенераторами; дизель-электрический генератор помещен в корзине на маятниковом подвесе в соответствующем звене сегментированной рамы, и электрический ток от генератора передается из корзины через вращающиеся электрические контакты; при этом магнитные поисковые системы размещены на диаметрально противоположных, относительно поверхности обследуемой трубы, звеньях сегментированной рамы, а вихретоковая поисковая система размещена на звене сегментированной рамы, где минимально действие магнитных полей магнитных поисковых систем, причем плоскости вращения дисков ходовых и опорных колес повернуты относительно соответствующих радиусов плоскости поперечного сечения трубы так, чтобы за один оборот сегментированной рамы вокруг трубы ее продольное смещение вдоль трубы равнялось требуемой ширине зоны контроля магнитных и вихретоковой поисковых систем, причем ходовые колеса установлены группами с левой и с правой сторон сегментированной рамы, а валы ходовых колес соединены с выходными валами соответствующих ходовых электродвигателей, электрические выводы тахогенераторов которых соединены с соответствующими входами для сигналов обратной связи соответствующего блока управления двигателем, а входы для сигналов задания требуемой скорости блоков управления двигателями соединены с соответствующими выходами интерфейсного узла бортового компьютера, интерфейсные выводы внешнего обмена которого соединены с соответствующими выводами бортового радиомодема, а интерфейсные выводы компьютера, предназначенные для ввода датчиковой информации и вывода управляющих команд, соединены с соответствующими выводами узла изменения режимов и сбора датчиковой информации, сигнальные входы которого соединены с соответствующими выводами датчиковых узлов магнитных поисковых систем и с соответствующими выводами вихретоковой системы неразрушающего контроля; интерфейсные входы бортового компьютера, предназначенные для приема сигналов пройденного пути, соединены с соответствующими выводами системы путеизмерения, а интерфейсные входы бортового компьютера, предназначенные для приема сигналов угловой ориентации соединены с соответствующими выводами системы угловой ориентации, интерфейсные выводы бортового компьютера, предназначенные для управления движением наружного сканирующего дефектоскопа, соединены с соответствующими входами соответствующих блоков управления соответствующими ходовыми двигателями, причем интерфейсные выводы второго радиомодема соединены с соответствующими интерфейсными выводами переносного компьютера.
2. Наружный сканирующий дефектоскоп по п.1, отличающийся тем, что магнитные поисковые системы выполнены с использованием постоянных магнитов и с регулировкой намагниченности изменением зазора между контролируемой стенкой трубы и полюсами магнитной поисковой системы механическим устройством, например в виде пары винт-гайка.
3. Наружный сканирующий дефектоскоп по п.1, отличающийся тем, что магнитные поисковые системы выполнены с использованием электромагнита с регулировкой намагниченности изменением тока в катушках магнитной поисковой системы.
4. Наружный сканирующий дефектоскоп по пп.1, 2 или 3, отличающийся тем, что в магнитных поисковых системах датчики магнитного поля выполнены трехкомпонентными с ориентацией одной оси чувствительности датчика магнитного поля по направлению поля намагничивающей системы, другой оси чувствительности перпендикулярно поверхности стенки трубы, третьей оси чувствительности перпендикулярно направлению магнитного поля намагничивающей системы и по касательной к образующей окружности трубы.
| Губанок И.И., Митрохин М.Ю., Морозов А.К., Синев А.И., Братчиков Д.Ю | |||
| УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОГО ВЫЗОВА ТЕЛЕФОННЫХ АППАРАТОВ | 1922 |
|
SU1000A1 |
| Третья международная конференция «Обслуживание и ремонт газонефтепроводов», Сб | |||
| докладов и сообщений, г | |||
| Сочи, октябрь 2006 г., Вып.2., М.: ООО | |||

