Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных измерителей параметров движения - угловых скоростей и линейных ускорений для инерциальных навигационных систем и пилотажных систем управления подвижных объектов.
Одним из главных источников погрешности измерений гироскопических датчиков - гироскопов и акселерометров является температурная зависимость систематических составляющих дрейфа - нулевых сигналов и масштабных коэффициентов.
Существует два пути устранения этой зависимости температурная стабилизация и алгоритмическая компенсация.
Температурная стабилизация требует дополнительных энергозатрат, увеличения габаритов и массы измерителя параметров движения. Однако и этот способ не устраняет нестабильность систематик, возникающих в датчиках угловых скоростей и линейных ускорений от пуска к пуску.
Известны микромеханические акселерометры, вибрационные датчики угловой скорости, изменение температуры окружающей среды, в которых приводит в них к температурному дрейфу нуля и изменению чувствительности, изменению масштабного коэффициента [1, 2]. Эффективным методом уменьшения влияния температуры окружающей среды на них является использование систем стабилизации температуры. Поэтому в некоторые из чувствительных элементов встраивают датчик температуры, как в ADXL 105. Уменьшить влияния градиентов температуры на точность инерциальных датчиков можно за счет изменения в них с помощью специальных нагревательных элементов рассеиваемой в датчиках мощности. Например, в акселерометре [3] введен резистивный нагревательный элемент, который через регулировочный резистор подключается к источнику постоянного тока. Это позволяет за счет ручной регулировки уменьшить градиенты температуры в этом чувствительном элементе в начальные моменты времени после включения, однако не обеспечивает стабилизации температуры акселерометра, что приводит к ухудшению его точности при изменениях температуры окружающей среды.
Снижение точности чувствительного элемента при изменениях температуры окружающей среды и является недостатком устройства, описанном в [3].
К недостаткам можно отнести и низкую экономичность, т.к. помимо мощности, рассеиваемой в нагревательном элементе, дополнительная величина мощности рассеивается и на регулировочном резисторе. Недостаток и то, что в нем используется не активная (автоматическая) система стабилизации температуры, а пассивная (ручная, выполняемая один раз) компенсация градиентов температуры.
Менее энергозатратным и с большими возможностями совершенствования является способ алгоритмическая компенсация температурной зависимости систематических составляющих дрейфа гироскопических датчиков [4]. В этом способе в заводских условиях в процессе отладки гироскопа определяют значения систематических составляющих в виде нулевых сигналов и масштабных коэффициентов при фиксированных значениях ряда температур в рабочем диапазоне.
Зависимость нулевого сигнала и масштабного коэффициента от температуры аппроксимируют полиномом:
- для нулевого сигнала:

- для масштабного коэффициента:

где: В0, B1, В2, В3 - коэффициенты полинома, аппроксимирующего температурную зависимость нулевого сигнала U0(T); S1, S2, S3 - коэффициенты полинома, аппроксимирующего температурную зависимость масштабного коэффициента SFK(T); Т - текущая температура.
Коэффициенты полиномов, описывающих температурную зависимость нулевого сигнала и масштабного коэффициента, записываются в микроконтроллер чувствительного элемента. В процессе эксплуатации прибора для текущих значений температуры по алгоритмам (1), (2) рассчитываются значения нулевых сигналов и масштабных коэффициентов. Расчет измеряемой угловой скорости Ω с учетом зависимости нулевого сигнала U0(T) и масштабного коэффициента SFK(T) от температуры осуществляется в микроконтроллере чувствительного элемента по формуле:
где: U(Ω) - выходной сигнал гироскопа в аналоговом виде.
Основным недостатком алгоритмической компенсации является отсутствие учета нестабильности систематических составляющих дрейфа гироскопа от пуска к пуску. Как показывают результаты экспериментальных исследований, нестабильность систематических составляющих от пуска к пуску имеет существенную величину и может превышать нестабильность систематических составляющих в запуске.
Известен микромеханический вибрационный гироскоп с вибрационной структурой, содержащий постоянный магнит, вибрационную конструкцию, расположенную в магнитном поле постоянного магнита и систему привода, выполненную с возможностью вызывать колебания вибрирующей конструкции на резонансной частоте и измерительный электрод, предназначенный для обнаружения движения в вибрирующей конструкции, контур управления возбуждением, блок компенсации [5].
Недостатком известного устройства является то, что нестабильность систематических составляющих масштабного коэффициента от пуска к пуску имеет существенную величину.
Задачей, на которое направлено изобретение, является снижение величины, нестабильности систематических составляющих, при этом достигается такой технический результат, как повышения точностных характеристик гироскопических датчиков.
Поставленная задача решается за счет того, что в микромеханическом вибрационном кольцевом гироскопе, содержащий магнитную систему с постоянным магнитом, вибрационную конструкцию, расположенную в магнитном поле постоянного магнита и систему привода, выполненную с возможностью вызывать колебания вибрирующей конструкции на резонансной частоте и измерительный контур, предназначенный для обнаружения движения в вибрирующей конструкции, контур управления возбуждением, блок компенсации, согласно изобретению, дополнительно введён блок компенсации и выполнен с возможностью вывода коррекции масштабного коэффициента на основе сигнала от системы привода и сохраненного опорного значения, при этом сохраненное опорное значение является значением сигнала от система привода, полученная во время процедуры калибровки, а также с возможностью вывода поправки на масштабный коэффициент, дополнительно основанной на известном соотношении между уровнем сигнала от системы привода, напряженностью магнитного поля и погрешностью масштабного коэффициента.
Воздействие внешних факторов, например, температуры окружающей среды существенно влияет на работу гироскопа, поэтому коэффициент масштабирования и коэффициент усиления/возбуждения/сигнал также будут изменяться в зависимости от температуры. Следовательно, блок компенсации может быть выполнен с возможностью приема сигнала температуры (например, от датчика температуры) и вывода коррекции масштабного коэффициента на основании как сигнала от системы возбуждения, так и сигнала температуры. Соответственно блок компенсации может включать в себя справочную таблицу, которая приспособлена для предоставления значения коррекции масштабного коэффициента в соответствии как с сигналом от системы привода, так и с сигналом температуры. Также известно, что длительное воздействие высоких температур (которое может иметь место при определенных условиях хранения или в течение длительных периодов эксплуатации) может привести к более быстрому снижению напряженности поля магнита. Для компенсации этого, первичный контур управления приводом автоматически увеличивает коэффициент усиления. Блок компенсации сможет автоматически учесть это, поскольку падение напряженности поля (по любой причине) приведет к соответствующему изменению в контуре управления приводом. По мере старения магнита индукция магнитного поля магнита ослабевает. В результате уменьшается амплитуда движения, вибрирующего кольца, и уменьшится амплитуда сигнала датчика, регистрируемого при воздействии угловой скорости. Чтобы компенсировать это, первичный контур управления приводом автоматически увеличивает коэффициент усиления. Следовательно, коэффициент усиления в контуре управления приводом можно использовать как меру старения магнита и можно использовать для компенсации изменения коэффициента масштабирования, вызванного старением магнита. Сравнивая усиление в контуре управления возбуждением с эталонным значением усиления в контуре управления возбуждением, полученным во время калибровки, тогда изменение коэффициента усиления по сравнению с эталонным значением может быть использовано для расчета изменения масштабного коэффициента после калибровки, вызванного старением магнита. Таким образом, этот процесс позволяет точно компенсировать масштабный коэффициент гироскопа на протяжении всего срока его службы по мере старения магнита. В ЭП (блок компенсации) гироскопа хранится взаимосвязь в виде формулы или программы вычисления, которая принимает входные данные, например, измеренное значение, усиление, и сохраненное эталонное значение и выводит рассчитанную коррекцию масштабного коэффициента. Для эффективности обработки данных блок компенсации может включать в себя справочную таблицу, которая выполнена с возможностью предоставления значения коррекции масштабного коэффициента в соответствии с входным сигналом от системы возбуждения.
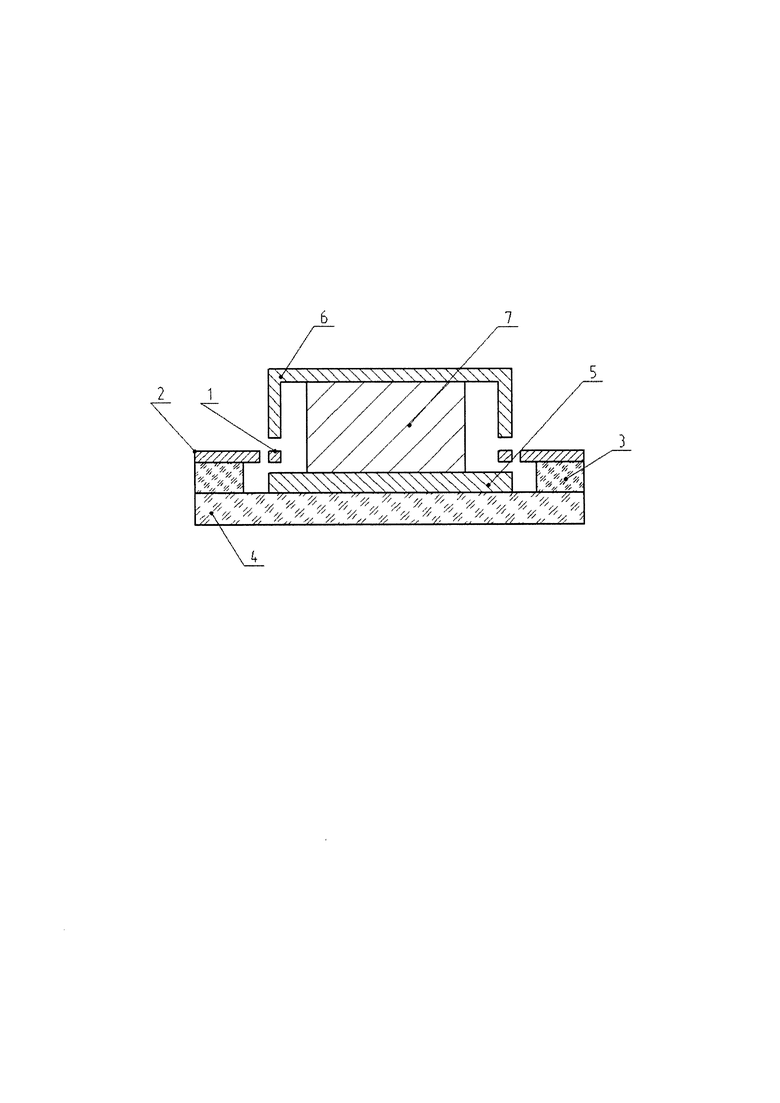
На фиг. 1 изображен схематически чувствительный элемент вибрационного кольцевого гироскопа,
где:
1 - кольцевой резонатор,
2 - опорная рама,
3 - стеклянная подставка,
4 - стеклянная подложка,
5 - нижний полюсный наконечник,
6 - верхний полюсный наконечник,
7 - постоянный магнит.
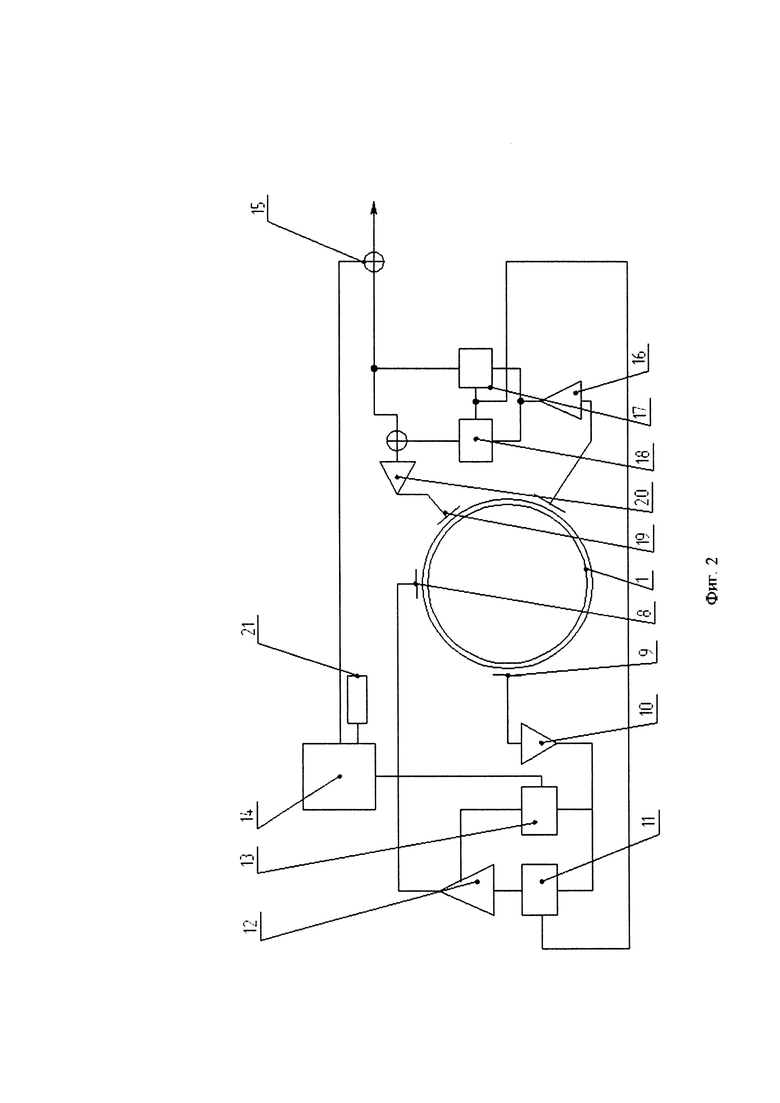
На фиг. 2 изображена схема управления микромеханическим вибрационным кольцевым гироскопом,
где:
8 - первичная обмотка,
9 - сигнальная обмотка,
10 - усилитель первый,
11 - ГУН и ФАПЧ,
12 - усилитель второй,
13 - АРУ,
14 - блок компенсации,
15 - сумматор,
16 - усилитель третий,
17 - демодулятор первый,
18 - демодулятор второй,
19 - вторичная обмотка,
20 - усилитель третий,
21 - датчик температуры.
Микромеханический вибрационный кольцевой гироскоп содержит кольцеобразный резонатор 1 прикреплен к опорной раме 2 с помощью гибких упругих элементов (не показаны), которые проходят от внешней окружности резонатора 1 к опорной раме 2 и позволяют резонатору 1 вибрировать в первичной и вторичной модах колебаний. Опорная рама 2 крепится к стеклянной подставке 3, которая, в свою очередь, крепится к стеклянной подложке 4. Магнитный узел содержит нижний полюсный наконечник 5, верхний полюсный наконечник 6 и постоянный магнит 7, который расположен между нижним полюсным наконечником 5 и верхним полюсным наконечником 6. Нижний полюсный наконечник 5 прикреплен к подложке 4 под резонатором. Система возбуждения устроена так, чтобы подавать управляющий сигнал на первичную обмотку 8 (на практике это может быть диаметрально противоположная пара контуров). Сигнал датчика генерируется сигнальной обмоткой 9 (первичный сенсорный), который расположен в положении 90 градусов вокруг резонаторного кольца 1 от первичной обмотки возбуждения 8. Сигнал датчика усиливается усилителем 10 и подается на схему 11 ГУН И ФАПЧ (генератора, управляемого напряжением/контура фазовой автоподстройки частоты), которая регулирует фазу и частоту сигнала, чтобы синхронизироваться с резонансной частотой резонатора 1, чтобы поддерживать первичный режим колебание. Скорректированный сигнал подается через усилитель 12 на первичный приводной контур 8 для поддержания резонанса. АРУ (автоматический регулятор напряжения) 13 принимает сигнал (фактически усиленный сигнал, выдаваемого усилителем 10) и сравнивает его с пороговым значением. Если величина сигнала ниже порога, это увеличивает усиление усилителя 12, а если величина сигнала больше порога, это уменьшает усиление усилителя 12. Это изменяет величина управляющего сигнала, который, в свою очередь, изменяет амплитуду колебаний резонатора, что, в свою очередь, изменяет амплитуду сигнала датчика. Таким образом, первичный контур управления приводом (включающий в себя усилитель 10, ГУН/ФАПЧ 11, АРУ 13 и усилитель 12) постоянно регулирует сигналы, чтобы поддерживать резонатор 1 в резонансе и с правильной амплитудой движения. Коэффициент усиления АРУ 13 также предоставляется в качестве выходного сигнала, который подается на блок 14 компенсации. Блок 14 компенсации выводит поправку масштабного коэффициента на основе ввода от АРУ 13. В некоторых примерах исполнения блок 14 компенсации может вычислять поправку масштабного коэффициента исключительно на основе ввода от АРУ 13 и сохраненной информации (такой как формула и известные значения параметров). В других примерах блок компенсации 14 может дополнительно учитывать эталонное значение, которое получено и сохранено во время процедуры калибровки и которое указывает усиление АРУ, которое требовалось во время калибровки. В некоторых других примерах блок 14 компенсации может выполнять поиск текущего значения усиления из АРУ 13 в справочной таблице, которая была предварительно вычислена и сохранена в блоке 14 компенсации во время калибровки.
Коррекция масштабного коэффициента применяется к сигналу скорости на сумматоре 15, чтобы обеспечить скорректированный выходной сигнал скорости гироскопа. В примере без обратной связи выходной сигнал усилителя 16 проходит через демодулятор 17 для извлечения действительного компонента, и он используется в качестве выходного сигнала скорости (подлежащего корректировке с помощью коррекции масштабного коэффициента на 15). В примерах с обратной связью, таких как показанные, выходной сигнал усилителя 16 также проходит через демодулятор 18 для извлечения квадро-компонента. АРУ 13 также компенсирует другие рабочие условия, такие как колебания температуры. Чтобы учесть это, компенсационный блок 14 может также иметь температурный вход от датчика 21 температуры. В таких примерах формула или справочная таблица, хранящаяся в компенсационном блоке 14, также учитывает температуру.
Источники информации:
1. "High Accuracy ±lg to ±5g Single Axis iMEMS® Accelerometer With Analog Input Data Sheet (Rev. A, 9/99)" http://www.analog.com/productSelection/pdf/ADXL105 a.pdf.
2. M.E. Ash, C.V. Trainor, R.D. Elliott, J.T. Borenstein, A.S. Kourepenis, P.A. Ward, M.S. Weinberg. "Micromechanical Inertial Sensor Development at Draper Laboratory with Recent Test Results Symposium Gyro Technology." 1999, Stuttgart, Germany.
3. Патент РФ №2120639.
4. В. Логозинский, И. Сафтулин, В. Соломатин. Волоконно-оптический датчик вращения с цифровым откорректированным выходом / VI Санкт-Петербургская международная конференция по интегрированным навигационным системам, 28-30 мая, 2001 г.
5. Патент США №7120548 - прототип.
Изобретение относится к области приборостроения и может быть использовано при построении одноосных и трехосных датчиков угловых скоростей и линейных ускорений для инерциальных навигационных систем и пилотажных систем управления подвижных объектов. Сущность предлагаемого изобретения состоит в следующем. Микромеханический вибрационный кольцевой гироскоп содержит, магнитную систему с постоянным магнитом, вибрационную конструкцию, расположенную в магнитном поле постоянного магнита и систему привода, выполненную с возможностью вызывать колебания вибрирующей конструкции на резонансной частоте и измерительный контур, предназначенный для обнаружения движения в вибрирующей конструкции, контур управления возбуждением, блок компенсации. При этом блок компенсации выполнен с возможностью вывода коррекции масштабного коэффициента на основе сигнала от системы привода и сохраненного опорного значения. Техническим результатом заявленного изобретения является повышение точностных характеристик гироскопических датчиков. 2 ил.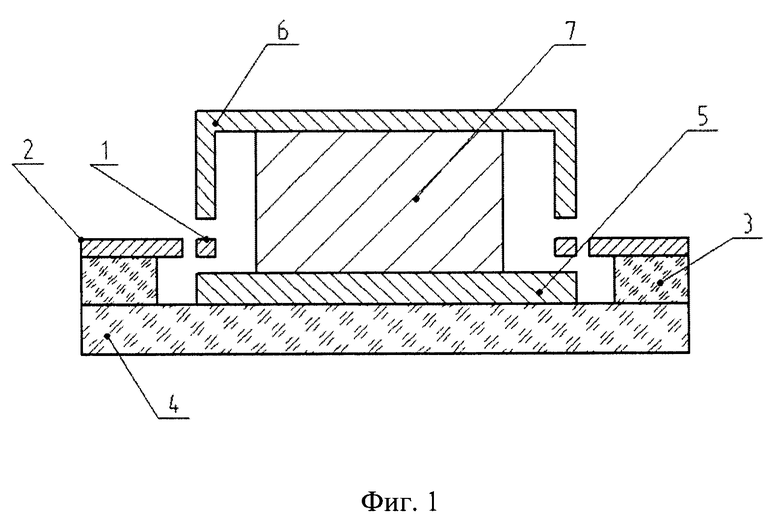
Микромеханический вибрационный кольцевой гироскоп, содержащий магнитную систему с постоянным магнитом, вибрационную конструкцию, расположенную в магнитном поле постоянного магнита, и систему привода, выполненную с возможностью вызывать колебания вибрирующей конструкции на резонансной частоте, и измерительный контур, предназначенный для обнаружения движения в вибрирующей конструкции, контур управления возбуждением, отличающийся тем, что дополнительно введен блок компенсации и выполнен с возможностью вывода коррекции масштабного коэффициента на основе сигнала от системы привода и сохраненного опорного значения, при этом сохраненное опорное значение является значением сигнала от системы привода, полученная во время процедуры калибровки, а также с возможностью вывода поправки на масштабный коэффициент, дополнительно основанной на известном соотношении между уровнем сигнала от системы привода, напряженностью магнитного поля и погрешностью масштабного коэффициента.
| US 0007120548 B2, 10.10.2006 | |||
| US 0005932804 A1, 03.08.1999 | |||
| 0 |
|
SU178349A1 | |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА НА ПОВОРОТНОМ СТОЛЕ | 2012 |
|
RU2579768C2 |
| DE 102011007168 B4, 19.09.2019 | |||
| US 0009696340 B2, 04.07.2017. | |||

