Изобретение относится к измерительной технике и может быть использовано для измерения ускорений.
Известен способ измерения ускорений, основанный на изменении светопропускания, изогнутого волоконного световода, вызванном изменением степени деформации изогнутого участка под действием измеряемого ускорения DJ.
Недостатком такого способа является наличие существенной температурной погрешности в случае применения световодов, типа кварц-полимер.
Наиболее близким кПредлагаемому по технической сущности является способ измерения усилий датчиком в измерителе скоростного напора, заключающийся в пропускании излучения источника по друм дифференциально включанным каналам в виде изогнутых световодов с участком изгиба, лежащим в плоскости вектора измеряемого параметра, и определении отклонения выходных сигналов 2,
Недостатком способа также является наличие существенной температурной погрешности в случае применения световодов типа кварц-полимер.
Необходимость применения световодов типа кварц-полимер в устройствах на основе изогнутых световодов объясняется тем, что (по сравнению со световодами типа кварц - кварц и полимер-полимер) они обладают наилучшими механическими и прочностными свойствами и в них нет остаточной деформации после прекращения воздействия возмущения. Кроме того, световоды типа кварц-полимер имеют относительно большой диаметр сердцевины, что облегчает ввод в световод относительно большой мощности света, в то время как чувствительность указанных устройств увеличивается с увеличением мощности, введенной в световод.
Целью изобретения является повышение точности измерения за счет компенсации температурной погрешности.
Указанная цель достигается тем, что по способу измерения ускорения механических величин, заключающемуся в пропускании излучения источника по двум дифференциально включенным каналам в виде изогнутых световодов с участком изгиба, лежащим в плоскости вектора измеряемого параметра, и определении отклонения выходных сигналов, предварительно снимают экспериментальные кривые температурной зависимости светопропускания изогнутых световодов по меньшей мере при двух различных нагрузках и находят точку пересечения их линеаризованных эквивалентов, при этом отклонение выходных сигналов определяют относительно значения, соответствующего найденной точке, а величину измеряемого параметра вычисляют по формуле
(U,,(U,.U)jдля однополярного сигнала,
(U,,(U.-U,)для двухполярного сигнала, (где Up - сигнал, соответствующий точке пересечения температурных зависимостей, и Uj - выходные сигналы соответственно первого и второго каналов .
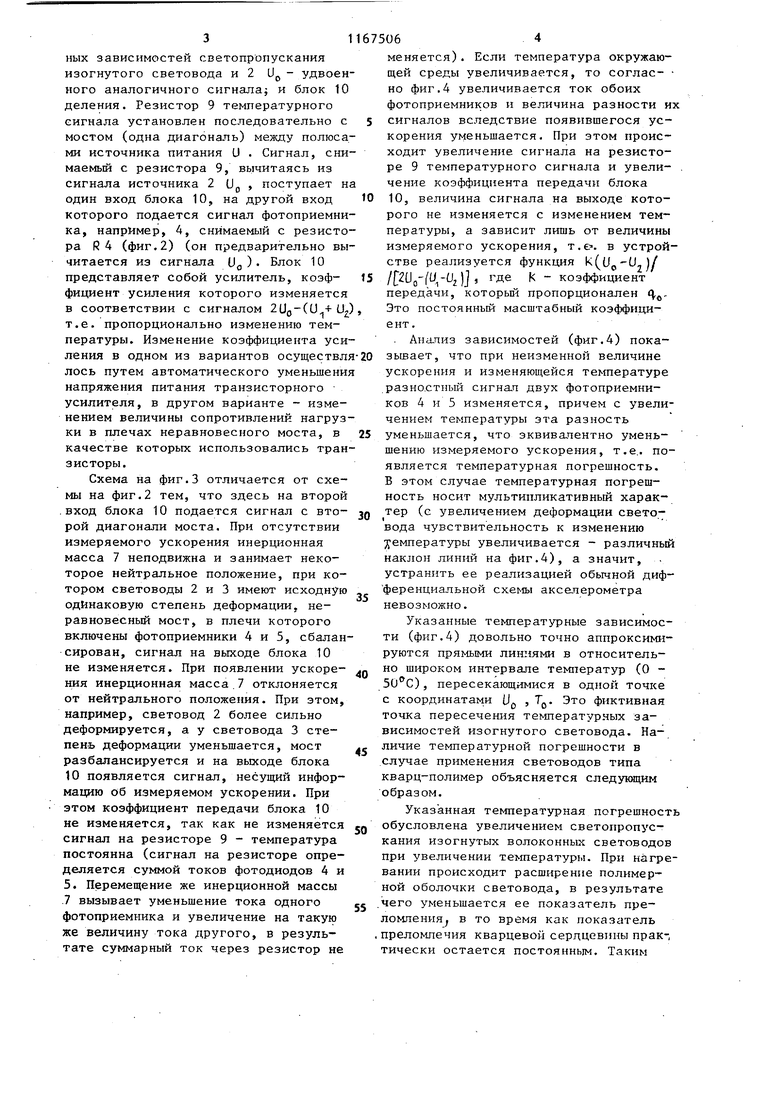
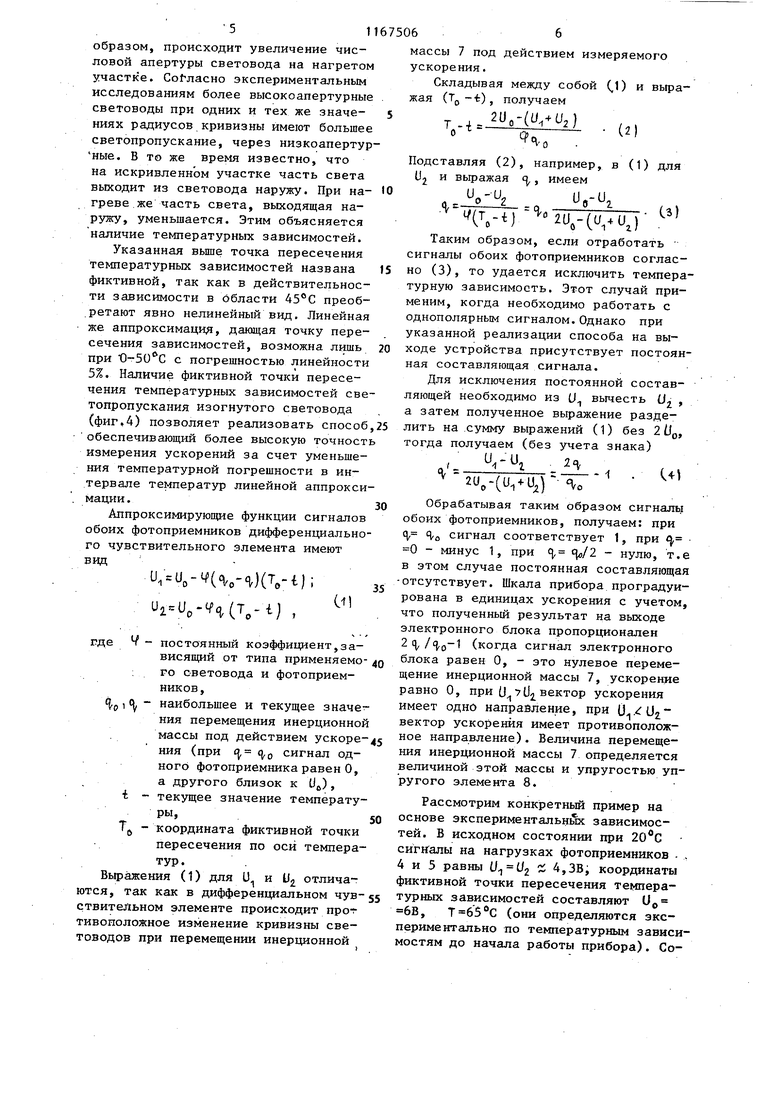
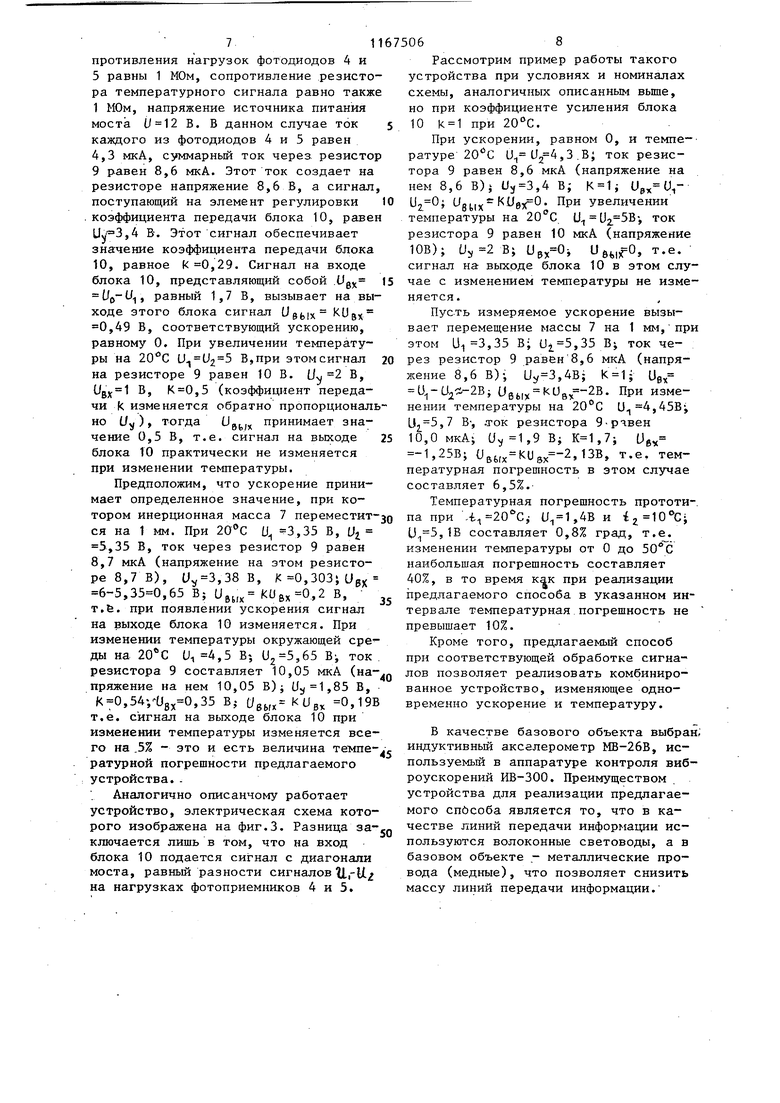
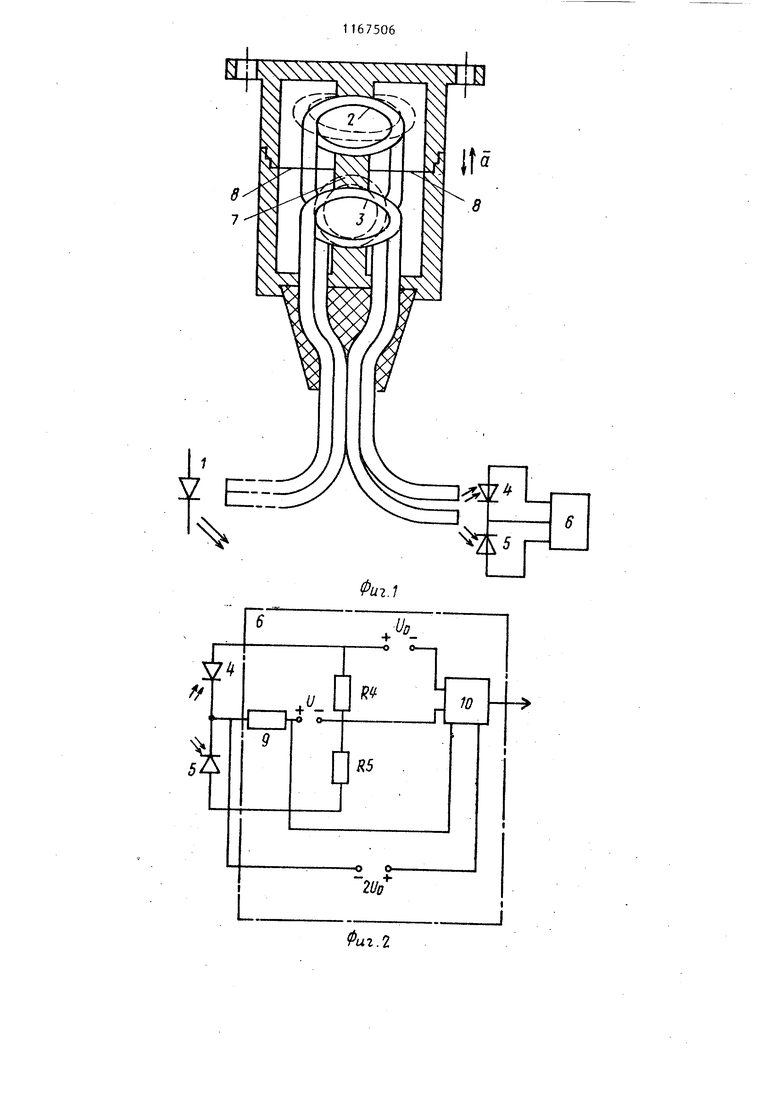
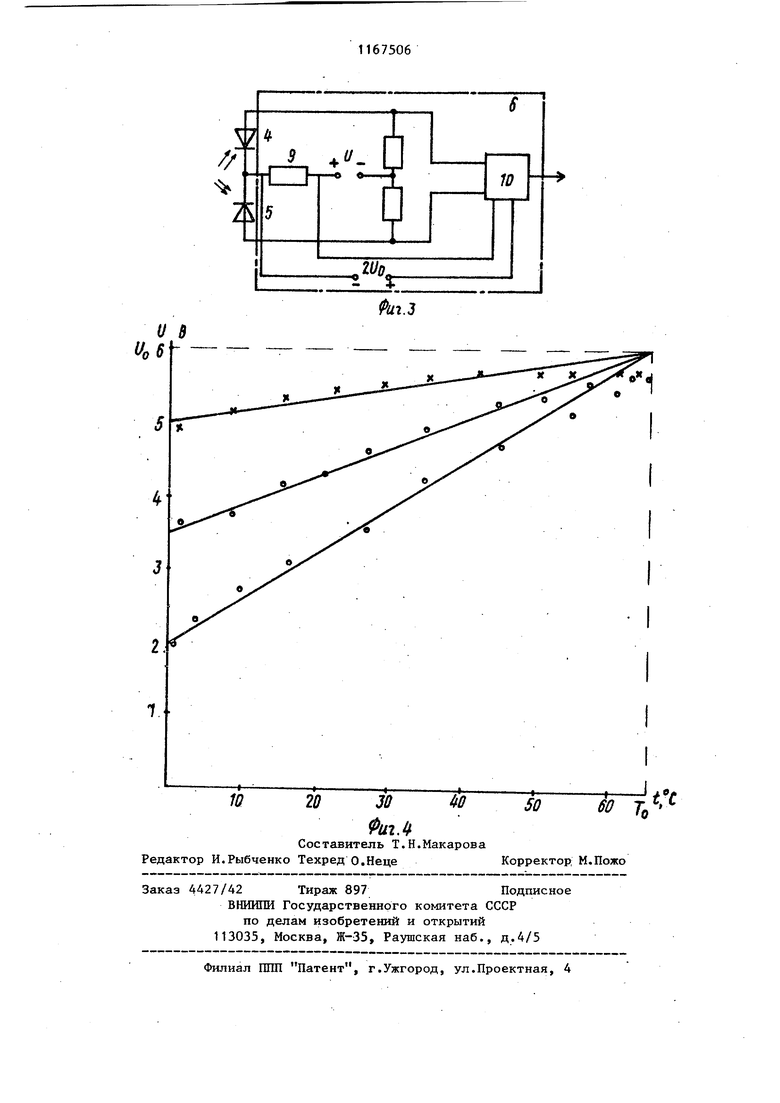
На фиг.1 представлена конструкция устройства для осуществления предлагаемого способа; на фиг.2 - электрическая схема устройства, работающего с однополярным сигналом на фиг.З электрическая схема устройства, работающего с двухполярным сигналом на фиг.4 - экспериментальные температурные зависимости сигналов фотоприемников, выделяющихся на соответствующих сопротивлениях нагрузки, представляющие собой фактически температурные зависимости светопропускания изогнутого световода, для случаев одинаковой и различной степеней деформации. Зависимости получены при исследовании световодов кварц-полиме типа ФИАН-ИХАН с диаметром сердцевины 330 мкм и числовой апертурой 0,39. В качестве источника излучения использовался световод АЛ-107, а в качестве фотоприемника - фотодиод ФД-26К.
Устройство содержит (фиг.1) источник 1 излучения, световоды 2 и 3 с участками изгиба, фотоприемники 4 и электронный блок 6 обработки информации, инерционную массу«7, упругий элемент 8.
Электронньй блок 6 содержит (фиг.2,3) неравновесный мост, в плечи которого включены фотоприемники 4 и 5, резистор 9 температурного сигнала, источники опорных сигналов:
Up - сигнала, соответствующего фиктивной точке пересечения температурных зависимостей светопропускания изогнутого световода и 2 U - удвоен ного аналогичного сигналаj и блок 10 деления. Резистор 9 температурного сигнала установлен последовательно с мостом (одна диагональ) между полюса ми источника питания U . Сигнал, сни маемый с резистора 9, вычитаясь из сигнала источника 2 Up , поступает н один вход блока 10, на другой вход которого подается сигнал фотоприемни ка, например, 4, снимаемый с резисто ра R 4 (фиг.2) (он предварительно вы читается из сигнала Ug ). Блок 10 представляет собой усилитель, козффициеВТ усиления которого изменяется в соответствии с сигналом 2U(j-(U -«-Up т.е. пропорционально изменению температуры. Изменение коэффициента усиления в одном из вариантов осуществл лось путем автоматического уменьшени напряжения питания транзисторного усилителя, в другом варианте - изменением величины сопротивлений нагрузки в плечах неравновесного моста, в качестве которых использовались тран зисторы. Схема на фиг.З отличается от схемы на фиг.2 тем, что здесь на второй .вход блока 10 подается сигнал с второй диагонали моста. При отсутствии измеряемого ускорения инерционная масса 7 неподвижна и занимает некоторое нейтральное положение, при котором световоды 2 и 3 имеют исходную одинаковую степень деформации, неравновесный мост, в плечи которого включены фотоприемники 4 и 5, сбалан сирован, сигнал на выходе блока 10 не изменяется. При появлении ускорения инерционная масса . 7 отклоняется от нейтрального положения. При этом, например, световод 2 более сильно деформируется, а у световода 3 степень деформации уменьшается, мост разбалансируется и на выходе блока 10 появляется сигнал, несущий информацию об измеряемом ускорении. При этом коэффициент передачи блока 10 не изменяется, так как не изменяется сигнал на резисторе 9 - температура постоянна (сигнал на резисторе определяется суммой токов фотодиодов 4 и 5. Перемещение же инерционной массы .7 вызывает уменьшение тока одного фотоприемника и увеличение на такую же величину тока другого, в результате суммарный ток через резистор не меняется). Если температура окружающей среды увеличивается, то соглас- но фиг.4 увеличивается ток обоих фотоприемников и величина разности их сигналов вследствие появившегося ускорения уменьшается. При этом происходит увеличение сигнала на резисторе 9 температурного сигнала и увели- . чение коэффициента передачи блока 10, величина сигнала на выходе которого не изменяется с изменением температуры, а зависит лишь от величины измеряемого ускорения, т.е-, в устройстве реализуется функция . 1/ (Ц-О) , где К - коэффициент передачи, которьпЧ пропорционален ,,, Это постоянный масштабный коэффициент. . Анализ зависимостей (фиг.4) показывает, что при неизменной величине ускорения и изменяющейся температуре разно.стный сигна.п двух фотоприемников 4 и 5 изменяется, причем с увеличением температуры эта разность уменьшается, что эквивалентно уменьшению измеряемого ускорения, т.е.. появляется температурная погрешность. В этом случае температурная погрешность носит мультипликативный характер (с увеличением деформации световода чувствительность к изменению температуры увеличивается - различньй наклон линий на фиг.4), а значит, . устранить ее реализацией обычной дифференциальной схемы акселерометра невозможно. Указанные температурные зависимости (фиг.4) довольно точно аппроксимируются прямыми линиями в относительно широком интервале температур (О ), пересекающимися в одной точке с координатами U фиктивная точка пересечения температурных зависимостей изогнутого световода. Наличие температурной погрешности в случае применения световодов типа кварц-полимер объясняется следунщим образом. Указанная температурная погрешность обусловлена увеличением светопропускания изогнутых волоконных световодов при увеличении температуры. При нагревании происходит расширение полимерной оболочки световода, в результате чего уменьшается ее показатель преломления, в то время как показатель преломления кварцевой сердцевины прак-, тически остается постояннь м. Таким образом, происходит увеличение числовой апертуры световода на нагретом участке. Согласно экспериментальным исследованиям более высокоапертурные световоды при одних и тех же значекиях радиусов кривизны имеют большее светопропускание, через низкоапертур ные. В то же время известно, что на искривленном участке часть света выходит из световода наружу. При нагреве же часть света, выходящая наружу, уменьшается. Этим объясняется наличие температурных зависимостей. Указанная вьше точка пересечения температурных зависимостей названа фиктивной, так как в действительности зависимости в области 45°С преобретают явно нелинейный вид. Линейная же аппроксимация, даницая точку пересечения зависимостей, возможна лишь при с погрешностью линейности 5%. Наличие фиктивной точки пересечения температурных зависимостей све топропускания изогнутого световода (фиг.4) позволяет реализовать способ обеспечивающий более высокую точност измерения ускорений за счет уменьшения температурной погрешности в интервале температур линейной аппрокси мации . Аппроксимирующие функции сигналов обоих фотоприемников дифференциально го чувствительного элемента имеют вид (cv,-)(Vt|; (-) . где Ч - постоянный коэффициент,зависящий от типа применяемо ; FO световода и фотоприемников, (.р, - наибольшее и текущее значе ния перемещения инерционной массы под действием ускоре ния (при «1,0 сигнал одного фотоприемника равен О, а другого близок к (J), i - текущее значение температу ры, TU - координата фиктивной точки пересечения по оси температур. Вьфажения (1) для U, и U2 отличаются, так как в дифференциальном чувствительном элементе происходит прог тивоиоложное изменение кривизны световодов при перемещении инерционной массы 7 под действием измеряемого ускорения. Складывая между собой (1) и выражая (Tp--fc), получаем .(„ Подставляя (2), например, в (1) для Uj и выражая с, имеем t 14 т ГТ Tl; ) ,-( Таким образом, если отработать сигналы обоих фотоприемников согласно (3), то удается исключить температурную зависимость. Этот случай применим, когда необходимо работать с однополярным сигналом.Однако при указанной реализации способа на выходе устройства присутствует постоянная составляющая сигнала. Для исключения постоянной составляющей необходимо из U вычесть U,, , а затем полученное выражение разделить на сумму выражений (1) без 2 Uj,, тогда получаем (без учета знака) П 2U,-(U,) Я.О Обрабатывая таким образом сигналы обоих фотоприемников, получаем: при с(, (о сигнал соответствует 1, при 0 - минус 1, при - нулю, т.е в этом случае постоянная составляющая отсутствует. Шкала прибора проградуирована в единицах ускорения с учетом, что полученный результат на выходе электронного блока пропорционален 2 (когда сигнал электронного блока равен О, - это нулевое перемещение инерционной массы 7, ускорение равно О, при и.iJji вектор ускорения имеет одно направление, при . вектор ускорения имеет противоположное направление). Величина перемещения инерционной массы 7 определяется величиной этой массы и упругостью упругого элемента 8. Рассмотрим конкретный пример на основе экспериментальных зависимостей. В исходном состоянии при 20С на нагрузках фотоприемников - , 4 и 5 равны UT t/2 г; 4,3Bi координаты фиктивной точки пересечения температурных зависимостей составляют Uj, 6В, (они определяются экспериментально по темаературным зависимостям до начала работы прибора). Сопротивления нагрузок фотодиодов 4 и 5 равны 1 МОм, сопротивление резистора температурного сигнала равно также 1 МОм, напряжение источника питания моста В. В данном случае ток каждого из фотодиодов 4 и 5 равен 4,3 мкА, суммарный ток через резистор 9 равен 8,6 мкА. Этот ток создает на резисторе напряжение 8,6 В, а сигнал поступающий на элемент регулировки коэффициента передачи блока 10, равен ,4 Б. Этот сигнал обеспечивает значение коэффициента передачи блока 10, равное К 0,29. Сигнал на входе блока 10, представляющий собой .Ugx L/o-U, равный 1,7 В, вызывает на выходе этого блока сигнал 0,49 В, соответствующий ускорению, равному 0. При увеличении температуры на U В,при этом сигнал на резисторе 9 равен 10 В. В, В, ,5 (коэффициент передачи k изменяется обратно пропорционально L/,(), тогда Bkif. принимает значение 0,5 В, т.е. сигнал на выходе блока 10 практически не изменяется при изменении тe fflepaтypы.
Предположим, что ускорение принимает определенное значение, при котором инерционная масса 7 переместится на 1 мм. При Ц 3,35 В, (jj 5,35 В, ток через резистор 9 равен 8,7 мкА (напряжение на этом резисторе 8,7 В), Uv,3,38 В, с 0,303; UBX 6-5,,65 В; UB,,, kUs,0,2 В, ; т.Ь. при появлении ускорения сигнал на выходе блока 10 изменяется. При изменении температуры окружающей среды на 20С и, 4,5 В ,65 В ток резистора 9 составляет 10,05 мкА (напряжение на нем 10,05 В) U.,85 В, К 0,54-08 0,35 Bj 0,19В т.е. сигнал на выходе блока 10 при изменении температуры изменяется всего на .5% - это и есть величина Tewneратурной погрешности предлагаемого устройства.Аналогично описанному работает устройство, электрическая схема которого изображена на фиг.З. Разница заключается лишь в том, что на вход блока 10 подается стлгная с диагонали моста, равный разности сигналов tLrU на нагрузках фотоприемников 4 и 5.
Рассмотрим пример работы такого устройства при условиях и номиналах схемы, аналогичных описанным выше, но при коэффициенте усиления блока 10 k 1 при 20С.
При ускорении, равном О, и температуре ,3.B; ток резистора 9 равен 8,6 мкА (напряжение на нем 8,6 B)j и,,3,4 В; К 1; Up ЦU2.0; Ug(, При увеличении температуры на U U2.5B-, ток резистора 9 равен 10 мкА (напряжение 10В); В; , , т.е. сигнал на выходе блока 10 в этом случае с изменением температуры не изменяется.
Пусть измеряемое ускорение вызывает перемещение массы 7 на 1 мм,при этом 1)3,35 В; U2.5,35 В; ток через резистор 9 равен8,6 мкА (напряжение 8,6 В); и,,4В; К 1; UBX -U2Ci-2Bi . При изменении температуры на ,45Bi и, 5,7 В-, -ток резистора 9-рчвен 10,0 мкА; Ux,1,9 Bi ,7; l)f -1,25В; ., т.е. температурная погрешность в этом случае составляет 6,5%.
Температурная погрешность прототипа при -i 20Cj и 1,4В и ,1В составляет 0,8% град, т.е. изменении температуры от О до наибольшая погрешность составляет 40%, в то время как при реализации предлагаемого способа в указанном интервале температурная погрешность не превышает 10%.
Кроме того, предлагаемый способ при соответствующей обработке сигналов позволяет реализовать комбинированное устройство, изменяющее одновременно ускорение и температуру.
В качестве базового объекта выбран индуктивный акселерометр МВ-26В, используемый в аппаратуре контроля виброускорений ИВ-300. Преимуществом устройства для реализации предлагаемого способа является то, что в качестве линий передачи информации используются волоконные световоды, а в базовом объекте - металлические провода (медные), что позволяет снизить массу линий передачи информации.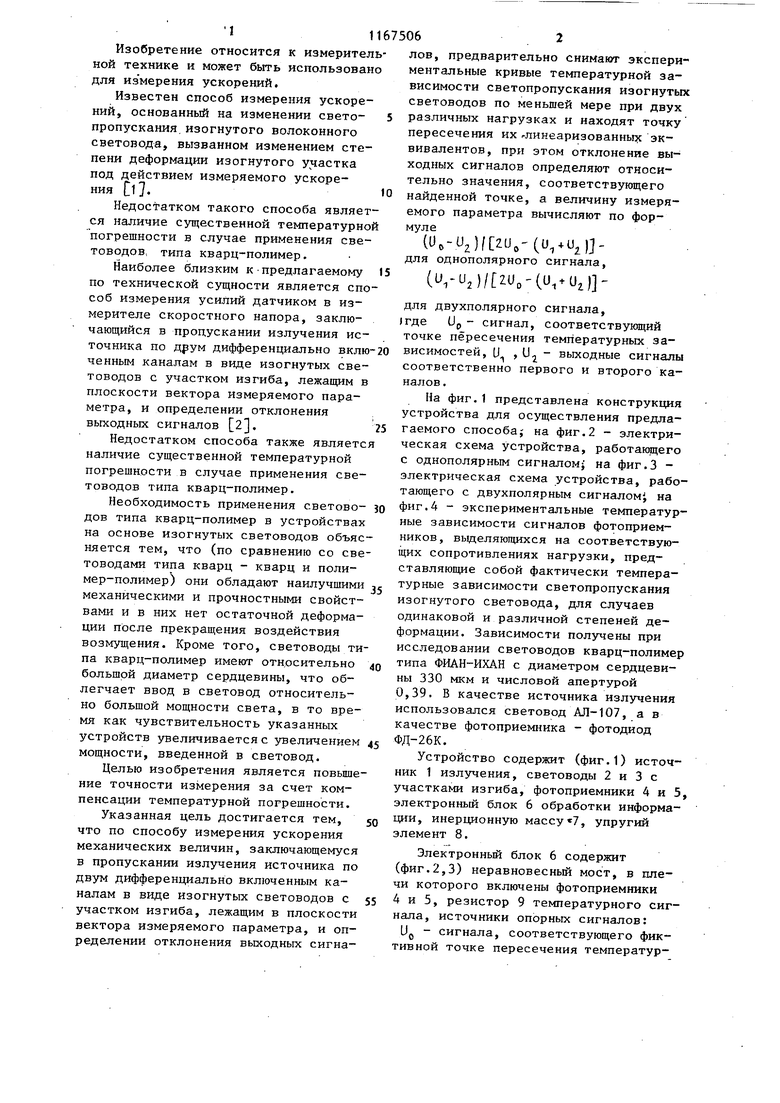
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла наклона | 1985 |
|
SU1328671A1 |
| Устройство для дистанционного измеренияТЕМпЕРАТуРы (ЕгО ВАРиАНТы) | 1979 |
|
SU800704A1 |
| Тензорезистивный преобразователь | 1978 |
|
SU697935A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК | 2005 |
|
RU2292525C1 |
| ТЕРМОСТАБИЛЬНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2000 |
|
RU2184945C1 |
| Способ определения диаметра волоконных световодов | 1984 |
|
SU1262278A1 |
| Датчик скоростного напора потока жидкости или газа | 1982 |
|
SU1107054A1 |
| Измеритель разности двух давлений | 1991 |
|
SU1812451A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НЕЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1995 |
|
RU2087857C1 |
| Тензопреобразователь давления мостового типа | 2019 |
|
RU2731033C1 |
СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН, заключающийся в пропускании излучения источника по двум дифференциально включенным каналам в виде изогнутых световодов с участком изгиба, лежащим в плоскости вектора измеряемого параметра, и определении отклонения выходных сигналов, отличающийся тем, что, с целью повышения точности за счет компенсации температурной погрешности, предварительно снимают экспериментальные кривые температурной зависимости светопропускания изогнутых световодов по меньшей мере при двух различных нагрузках и находят точку пересечения их линеаризованных эквивалентов, при зтом отклонение выходных сигналов, определяют относительно значения, соответствующего найденной точке, а величину измеряемого параметра вычисляют по формуле (Uo-U )/Г2и,- (Ui-UJ Йля однополярного сигнала (Л (UrUj| 2U,4U,.Uj для двухполярного сигнала, где (i сигнал, соответствующий точке пересечения температурных зависимостей, Ц, Uj - выходные сигналы соответственно первого и второго каналов. О5 -ч СД О 05
//
.
I
Ч
ю
гио
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Оптико-механический акселерометр | 1979 |
|
SU794545A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Датчик скоростного напора потока жидкости или газа | 1982 |
|
SU1107054A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
