Изобретение относится к области измерительной техники и может быть использовано для измерения перемещений и вибраций бесконтактным способом.
Известен оптический датчик перемещений, содержащий источник света, осветительный и приемный световоды, фотоприемник, регистрирующий прибор, насадку, скрепленную с общим торцом обоих гибких световодов, выполненную в форме цилиндра или усеченного конуса, на боковую поверхность которой нанесено отражающее покрытие [А.с. №1223030 СССР, Q 01 В 11/02. Оптический датчик перемещений // В.А.Медников, В.А.Олейников и др. - Открытия. Изобретения. 1986. №13]. Недостатком устройства является изменение чувствительности к виброперемещениям при изменении коэффициента отражения света от контролируемой поверхности или при изменении мощности светового потока источника света.
Известен волоконно-оптический датчик с разноудаленными каналами [Зак Е.А. Волоконно-оптические преобразователи с внешней модуляцией. - М.: Энергоатомиздат, 1989, стр.93], принятый за прототип, содержащий два волоконно-оптических преобразователя, источник излучения, два фотоприемника и электронный блок. Торцы световодов располагают таким образом, чтобы для одного канала начальное рабочее расстояние соответствовало максимуму функции преобразования, а для другого - линейному участку функции преобразования. Принцип работы данного устройства заключается в том, что при перемещении поверхности контролируемого объекта изменение сигнала на выходе первого фотоприемника практически отсутствует, в то время как изменение сигнала на выходе второго фотоприемника пропорционально этому перемещению. В электронном блоке определяется отношение сигналов с выходов двух фотоприемников. Недостатками устройства является следующее:
1. Так как наклон функции преобразования в точке максимума практически равен нулю, то точность выхода на эту точку небольшая, так как случайные ошибки в измерении значения сигнала U1 с выхода первого преобразователя, установленного торцом в точку максимума функции преобразования (U1=f(z), где z - измеряемое перемещение), приводят к большим ошибкам в оценке z. Этот недостаток усугубляется еще и тем, что приходится анализировать не саму величину U1, а разности между ее соседними значениями.
2. В процессе измерения перемещений величина U1 в силу различных факторов может измениться, например уменьшиться, причем не представляется возможным определить, а, следовательно, учесть, чем это уменьшение вызвано: изменением мощности источника излучения, коэффициента отражения поверхности контролируемого объекта или изменением величины установочного зазора. В последнем случае отношение сигналов с выходов двух преобразователей не позволяет отстроиться от изменений мощности источника излучения или коэффициента отражения контролируемого объекта.
3. В устройстве прототипа предусмотрена возможность использования двух волоконно-оптических преобразователей, но только один из них в установленном режиме обладает чувствительностью к вибрации.
Следовательно, с точки зрения получения максимальной чувствительности устройство не оптимально.
Все вышеперечисленные факторы в конечном итоге снижают точность измерений и являются существенными недостатками прототипа.
В основу изобретения поставлена задача - повышение точности измерений за счет обеспечения инвариантности к изменению параметров источника питания, источника излучения, к изменению величины коэффициента отражения поверхности контролируемого объекта, например, в результате загрязнения, а также увеличение чувствительности устройства в результате использования обоих волоконно-оптических преобразователей для измерения перемещений.
В предлагаемом волоконно-оптическом датчике для бесконтактного измерения перемещений, в частности вибраций, поставленная задача решена за счет нового выполнения его схемы, а именно в схему, содержащую волоконно-оптические преобразователи, источник излучения и два фотоприемника, введены: три резистора, измерительный мост, в плечи которого включены два резистора и фотодиоды в качестве фотоприемников, соединенные по схеме с общим анодом, источник питания, соединенный с вершинами диагонали питания, причем с одной из них через резистор, четыре устройства выборки-хранения, соединенные с тремя вершинами диагоналей моста и с источником питания, коммутатор, входы которого соединены с выходами устройств выборки-хранения, аналого-цифровой преобразователь (АЦП), вход которого соединен с выходом коммутатора, шина данных и управления АЦП соединена с входами вычислительного устройства, а торцы двух приемных жгутов световодов неравноудалены от контролируемой поверхности.
Сопоставительный анализ известной и предложенной схем датчиков показал, что более высокая точность измерения предложенным датчиком достигнута за счет использования обоих волоконно-оптических преобразователей для измерения перемещений, включения фотодиодов в плечи моста по схеме с общим анодом и обработки сигналов с трех вершин диагоналей моста и с источника питания по алгоритму, позволяющему обеспечить инвариантность к изменению параметров источника питания, источника излучения и к изменению величины коэффициента отражения поверхности контролируемого объекта.
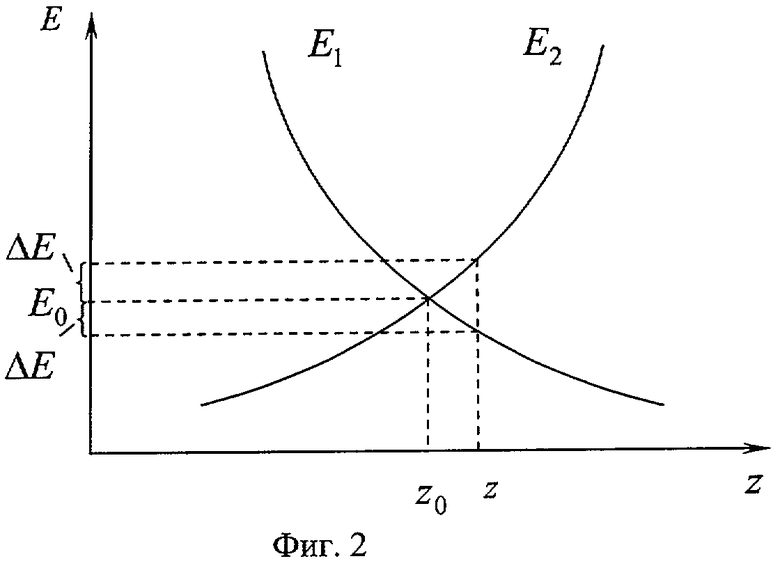
На чертежах приведены схема волоконно-оптического датчика (Фиг.1) и зависимости мощностей Е1 и Е2 отраженного светового потока на выходах первого и второго приемного световодов от измеряемого расстояния z (Фиг.2).
Волоконно-оптический датчик содержит излучающий световод 1, два приемных 2 и 3 световода, неравноудаленных от контролируемой поверхности 4, источник излучения 5, соединенный с излучающим световодом, фотоприемники 6 и 7, связанные с приемными световодами и представляющие собой фотодиоды, три резистора 8, 9 и 10, измерительный мост, в плечи которого включены два фотодиода 6 и 7 по схеме с общим анодом и два резистора 8 и 9. Устройство содержит также источник питания 11, соединенный с вершинами диагонали питания моста, причем с первой вершиной - через третий резистор 10, вторая вершина диагонали питания соединена, кроме того, с общим выводом, четыре устройства выборки-хранения 12, 13, 14 и 15, коммутатор 16, АЦП 17 и вычислительное устройство 18. Вход первого устройства выборки-хранения 12 соединен с источником питания, вход второго устройства выборки-хранения 13 - с первой вершиной диагонали питания моста, входы третьего 14 и четвертого 15 устройств выборки-хранения подключены к вершинам измерительной диагонали моста, входы коммутатора 16 соединены с выходами четырех устройств 12, 13, 14 и 15 выборки-хранения, вход АЦП 17 соединен с выходом коммутатора 16, а входы вычислительного устройства 18 подключены к шине данных и управления АЦП 17.
Торцы двух приемных жгутов световодов 2 и 3 сдвинуты друг относительно друга таким образом, чтобы при изменении расстояния z между торцами и контролируемой поверхностью 4 величины Е1 и E2 мощностей отраженного светового потока на выходах двух приемных световодов изменялись с противоположным знаком: например, при увеличении расстояния z величина Е1 мощности на выходе первого световода уменьшалась, а значение Е2 мощности на выходе второго световода увеличивалось, а наклон обеих характеристик должен быть одинаковым. Для увеличения поперечного сечения световодов они могут выполняться в виде жгутов световодов.
Работает волоконно-оптический датчик следующим образом. Световоды 1, 2 и 3 размещаются в непосредственной близости от контролируемой поверхности 4, которая освещается источником света 5 через световод 1. Для определенности рассмотрим случай, когда второй приемный световод 3 расположен ближе к контролируемой поверхности 4, чем первый приемный световод 2 и излучающий световод 1, расположенные на одном расстоянии от поверхности 4, что соответствует ситуации, изображенной на фиг.1. Отраженный свет через световоды 2 и 3 попадает на фотодиоды 6 и 7 соответственно. Изменение величин мощностей Е1 и Е2 отраженного светового потока на выходах двух приемных световодов определяют перемещение (вибрацию) контролируемой поверхности, так как значение Е пропорционально величине z расстояния до контролируемого объекта: E=f(z). Мощности Е1 и Е2 в диапазоне измерений изменяются противоположным образом, как показано на фиг.2. Точка пересечения зависимостей - Е0 соответствует расстоянию z0, которое будем называть установочным зазором. При измерении перемещения (вибрации) z отклоняется от z0. Величины мощностей Е1 и Е2 отраженного светового потока, попадающего на первый и второй фотодиоды, соответственно равны:


где ΔЕ - величина отклонения от Е0 при измерении перемещения,
с - коэффициент, учитывающий нестабильность источника излучения, изменение величины коэффициента отражения поверхности контролируемого объекта, например, в результате загрязнения поверхности. Величину I1 тока, генерируемого первым фотодиодом 6 и протекающего через резистор 8, можно описать выражением:

где k1 - коэффициент преобразования фотодиода 6.
Аналогично для величины I2 тока, генерируемого вторым фотодиодом 7 и протекающего через резистор 9, имеем:

где k2 - коэффициент преобразования фотодиода 7.
Суммарный ток I моста, протекающий через резистор 10, равен сумме токов, протекающих в плечах моста:

При равенстве коэффициентов преобразования фотодиодов 5 и 6 k1=k2=k выражение (5) перепишется в виде:

Напряжение на входе первого устройства 12 выборки-хранения равно напряжению источника питания: U1=Un. Напряжение на входе второго устройства 13 выборки-хранения составит U2=Un-I·R10, где R10 - сопротивление резистора 10 (см. фиг.1). С учетом (6) окончательно получим:

Аналогично на входах третьего и четвертого устройств 14 и 15 выборки-хранения величины напряжений составят соответственно:
U3=U2-I2·R9 и U4=U2-I1·R8,
где R9 и R8 - значения сопротивлений резисторов 9 и 8. С учетом формул (3), (4) и (7), а также равенства k1=k2=k окончательно получим:


Величины сигналов U1, U2, U3 и U4 с выходов четырех устройств 12-15 выборки-хранения через коммутатор 16 поступают на вход АЦП 17. После оцифровки указанные значения вводятся в вычислительное устройство 18, в котором определяется отношение разностей U3-U4 и U2-U1:

Так как p=f(ΔE) (см. (10)), a z зависит от ΔЕ, то существует зависимость z=f(p), согласно которой по полученному значению р однозначно определяется измеряемое перемещение z. Вид данной зависимости задается диапазоном измеряемых перемещений, а ее коэффициенты можно найти путем непосредственной калибровки датчика в сборе.
Как видно из выражения (10), величина 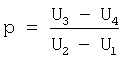 не зависит от значений Un, с и k, т.е. достигнута инвариантность к изменению параметров источника питания, источника излучения и к изменению значений коэффициента отражения поверхности контролируемого объекта. Увеличена также чувствительность устройства в результате того, что оба фотоприемника используются при измерении перемещений (вибраций), и в процессе измерений «чувствуют» перемещение (вибрацию) в отличие от прототипа, в котором один из фотоприемников задействован для определения точки максимума характеристики волоконно-оптического преобразователя и перемещений (вибрации) «не чувствует».
не зависит от значений Un, с и k, т.е. достигнута инвариантность к изменению параметров источника питания, источника излучения и к изменению значений коэффициента отражения поверхности контролируемого объекта. Увеличена также чувствительность устройства в результате того, что оба фотоприемника используются при измерении перемещений (вибраций), и в процессе измерений «чувствуют» перемещение (вибрацию) в отличие от прототипа, в котором один из фотоприемников задействован для определения точки максимума характеристики волоконно-оптического преобразователя и перемещений (вибрации) «не чувствует».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ЖИРА И БЕЛКА В МОЛОКЕ И МОЛОЧНЫХ ПРОДУКТАХ | 1996 |
|
RU2110065C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2497077C1 |
| Оптический датчик перемещений | 1990 |
|
SU1767327A1 |
| Способ измерения расстояний до объекта и устройство для его осуществления | 1990 |
|
SU1779919A1 |
| Устройство для измерения деформаций | 1985 |
|
SU1278571A1 |
| Волоконно-оптический преобразователь | 1990 |
|
SU1747896A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1994 |
|
RU2112927C1 |
| Способ измерения механических величин | 1983 |
|
SU1167506A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТОВ | 2001 |
|
RU2235973C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2023 |
|
RU2804679C1 |
Изобретение относится к области измерительной техники и может быть использовано для измерения перемещений и вибраций бесконтактным способом. Волоконно-оптический датчик содержит излучающий и два приемных световода, неравноудаленных от контролируемой поверхности, источник излучения, измерительный мост, в плечи которого включены два резистора и фотодиоды в качестве фотоприемников, соединенные по схеме с общим анодом, источник питания, четыре устройства выборки-хранения, коммутатор, аналого-цифровой преобразователь и вычислительное устройство. Технический результат - повышение точности измерений за счет обеспечения инвариантности к изменению параметров источника питания, источника излучения, к изменению величины коэффициента отражения поверхности контролируемого объекта, а также возможность увеличить чувствительность устройства к измеряемому параметру за счет использования обоих фотоприемников в измерительном процессе. 2 ил.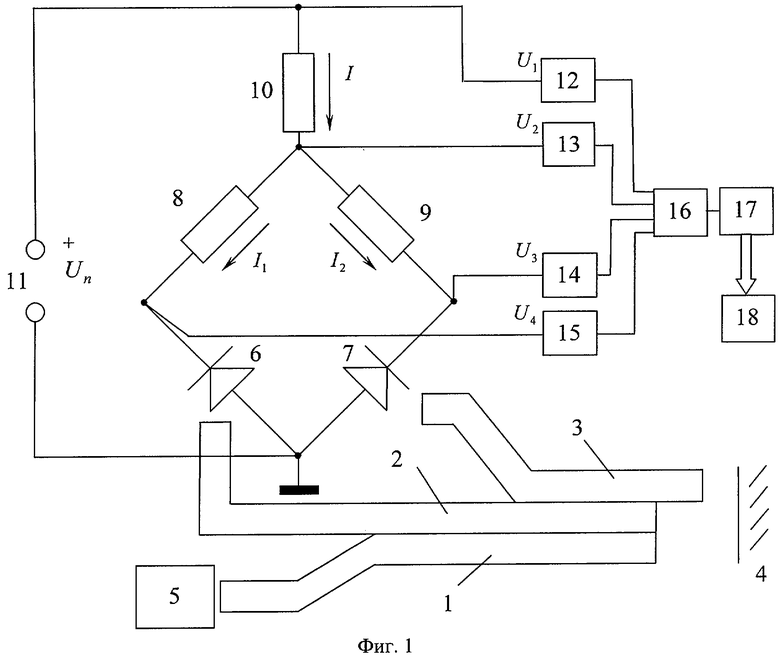
Волоконно-оптический датчик, содержащий излучающий световод, два приемных световода, неравноудаленных от контролируемой поверхности, источник излучения, соединенный с излучающим световодом, два фотоприемника, связанных с приемными световодами, отличающийся тем, что в него введены три резистора, измерительный мост, в плечи которого включены два резистора и фотодиоды в качестве фотоприемников, соединенные по схеме с общим анодом, источник питания, соединенный с вершинами диагонали питания моста, причем с первой вершиной - через третий резистор, вторая вершина диагонали питания соединена кроме того с общим выводом, четыре устройства выборки-хранения, вход первого из которых соединен с источником питания, вход второго - с первой вершиной диагонали питания моста, входы третьего и четвертого устройств выборки-хранения подключены к вершинам измерительной диагонали моста, коммутатор, входы которого соединены с выходами четырех устройств выборки-хранения, аналого-цифровой преобразователь, вход которого соединен с выходом коммутатора, вычислительное устройство, входы которого подключены к шине данных и управления аналого-цифрового преобразователя.
| Оптический датчик перемещений | 1983 |
|
SU1223030A1 |
| Волоконно-оптический датчик расстояния | 1986 |
|
SU1388723A1 |
| Волоконно-оптический преобразователь перемещений | 1987 |
|
SU1539519A1 |
| Уравновешенный измерительный мост постоянного тока | 1981 |
|
SU1007035A1 |
| JP 60080713 A, 08.05.1985. | |||

