2. Автомат поп.1,отличащ н и с я тем, что блок анализа содержит компараторы, инверторы, схемы совпадения и исполнител1 ный орган, входы которого соединены с выходами схем совпадения, первые входы которых связаны между собой и с третьим вь1ходом коммутатора, первый и вторым выходами связанно с первыми входами компараторов.
вторыми входами связанных с входом детектора нуля, причем выход первого компаратора через первьй инвертор соединен с вторым входом первой схемы совпадения и с вторым входом второй схемы совпадения, третьим входом связанной через второй инвертор с вторым входом третьей схемы совпадения и с выходом второго компаратора.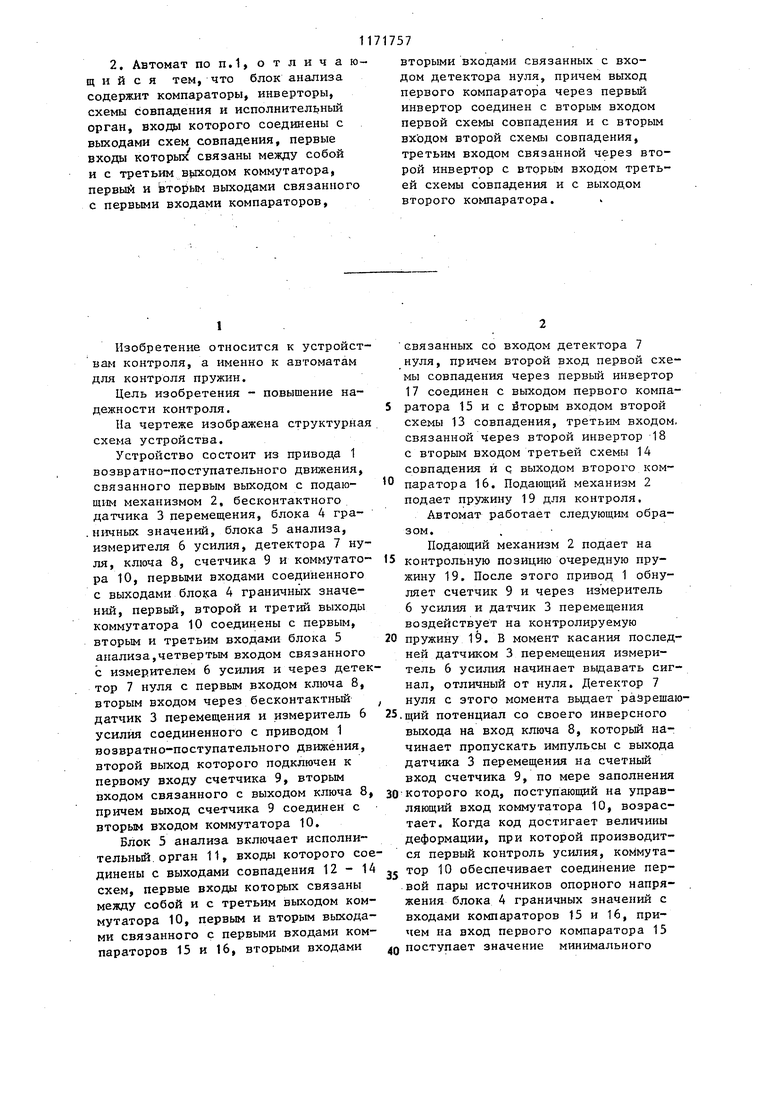
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля растворов и провалов контактов электроаппаратов | 1981 |
|
SU1029254A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ НАПРЯЖЕНИЯ | 1990 |
|
RU2018147C1 |
| Измеритель шума | 1985 |
|
SU1293669A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| Устройство для контроля металлизированных переходов печатной платы | 1985 |
|
SU1308955A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ПЬЕЗОДАТЧИКОВ | 1991 |
|
SU1817652A1 |
| Устройство для измерения механических параметров коммутирующих элементов | 1984 |
|
SU1215094A1 |
| Способ цикловой синхронизации с динамической адресацией получателя | 2016 |
|
RU2621181C1 |
| Устройство для автоматической сорбировки кускового материала | 1989 |
|
SU1697906A2 |
| Устройство для проверки коммутирующей аппаратуры | 1981 |
|
SU991334A1 |
1.. АВТОМАТ ДЛЯ КОНТРОЛЯ ПРУЖИН, содержащий привод возвратнопоступательного движения, связанный первым выходом, с подающим механизмом, бесконтактный датчик перемещения, блок граничных значений и блок анализа, отличающийся , что, с целью повышения надежности контроля, он имеет измеритель усилия, детектор нуля, ключ, счетчик и коммутатор, первыми входами соединенный с выходами блока граничных значений, первый, второй и третий выходы коммутатора соединены с первым, вторым и третьим входами блока анализа, четвертым входом связанного с измерителем усилия и через детектор нуля - с первым входом ключа, вторым входом через бесконтактный датчик перемещения и измеритель усилия соединенного с приводом возвратно-поступательного движения, второй выход которого подключен к i первому входу счетчика, вторым входом связанного с выходом ключа, (Л причем выход счетчика соединен с вторым входом коммутатора. СП 
1
Изобретение относится к устройствам контроля, а именно к автоматам для контроля пружин.
Цель изобретения - повышение надежности контроля.5
На чертеже изображена структурная схема устройства.
Устройство состоит из привода 1 возвратно-поступательного движения, связанного первым выходом с подаю- О щнм механизмом 2, бесконтактного датчика 3 перемещения, блока 4 граничных значений, блока 5 анализа, измерителя 6 усилия, детектора 7 нуля, ключа 8, счетчика 9 и коммутато- 15 ра 10, первыми входами соединенного с выходами 4 граничных значений, первьй, второй и третий выходы коммутатора 10 соединены с первым, вторым и третьим входами блока 5 20 анализа,четвертым входом связанного с измерителем 6 усилия и через детектор 7 нуля с первым входом ключа 8, вторым входом через бесконтактньй датчик 3 перемещения и измеритель 6 25 усилия соединенного с приводом 1 возвратно-поступательного движения, второй выход KOTopoio подключен к первому входу счетчика 9, вторым входом связанного с выходом ключа 8, зо причем выход счетчика 9 соединен с вторым входом коммутатора 10.
Блок 5 анализа включает исполни™ тельный, орган 11 входы которого соединены с выходами совпадения 12 - 14 схем, первые входы которых связаны между собой и с третьим выходом коммутатора 10, первым и вторым выходами связанного с первыми входами компараторов 15 и 16, вторыми входами Q
связанных со входом детектора 7 нуля, причем второй вход первой схемы совпадения через первый инвертор 17 соединен с выходом первого компаратора 15 и с йторьм входом второй схемы 13 совпадения, третьим входом связанной через второй инвертор 18 с вторым входом третьей схемы 14 совпадения и с выходом второго компаратора 16. Подающий механизм 2 подает пружину 19 для контроля.
Автомат работает следующим образом. ,
Подающий механизм 2 подает на контрольную позицию очередную пружину 19. После этого привод 1 обнуляет счетчик 9 и через измеритель 6 усилия и датчик 3 перемещения воздействует на контролируемую пружину 19. В момент касания последней датчиком 3 перемещения измеритель 6 усилия начинает выдавать сигнал, отличный от нуля. Детектор 7 нуля с этого момента вьщает раэреща.щий потенциал со своего инверсного выхода на вход ключа 8, которьй начинает пропускать импульсы с выхода датчика 3 перемещения на счетньй вход счетчика 9, по мере заполнения которого код, поступающий на управляющий вход коммутатора 10, возрастает. Когда код достигает величины деформации, при которой производится первый контроль усилия, коммутатор 10 обеспечивает соединение первой пары источников опорного напряжения блока 4 граничных значений с входами компараторов 15 и 16, причем на вход первого компаратора 15 поступает значение минимального
3 11717574
допустимого для данной деформацииданной деформации усилие оказывается
усилия, а на вход второго компара-меньше минимального допустимого знатора 16 - значение максимальногочения, то строб-сигнал проходит
допустимого усилия. Со стробирующего через первую схему 12 совпадения,
выхода коммутатора 10 .на первые5 если больше максимального допустивходы схем 12 - 14 совпадения посту-мого значения - через третью схему
пает стробирующий сигнал, разре--14 совпадения, если-усилие оказывашающий контроль усилия при даннойется в допустимых пределах - через
деформации. В зависимости отвели-вторую схему 13 совпадения. Точно.
чины напряжения на выходе измерителя10 также производится контроль при
6 усилия при данной деформациидругих значениях деформации пружистроб-сигнал проходит через однуны 19. После возвращения привода 1
из схем 12 - 14 совпадения на одинв исходное состояние подающий мехаиз входов исполнительного органа 11,.низм 2 подает на позицию контроля
который выдает сигналы о годности1д очередную пружину 19 и цикл повтопружин или сортирует их. Если при ояется.
| Автомат для контроля и разбраковки пружин | 1982 |
|
SU1087961A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
