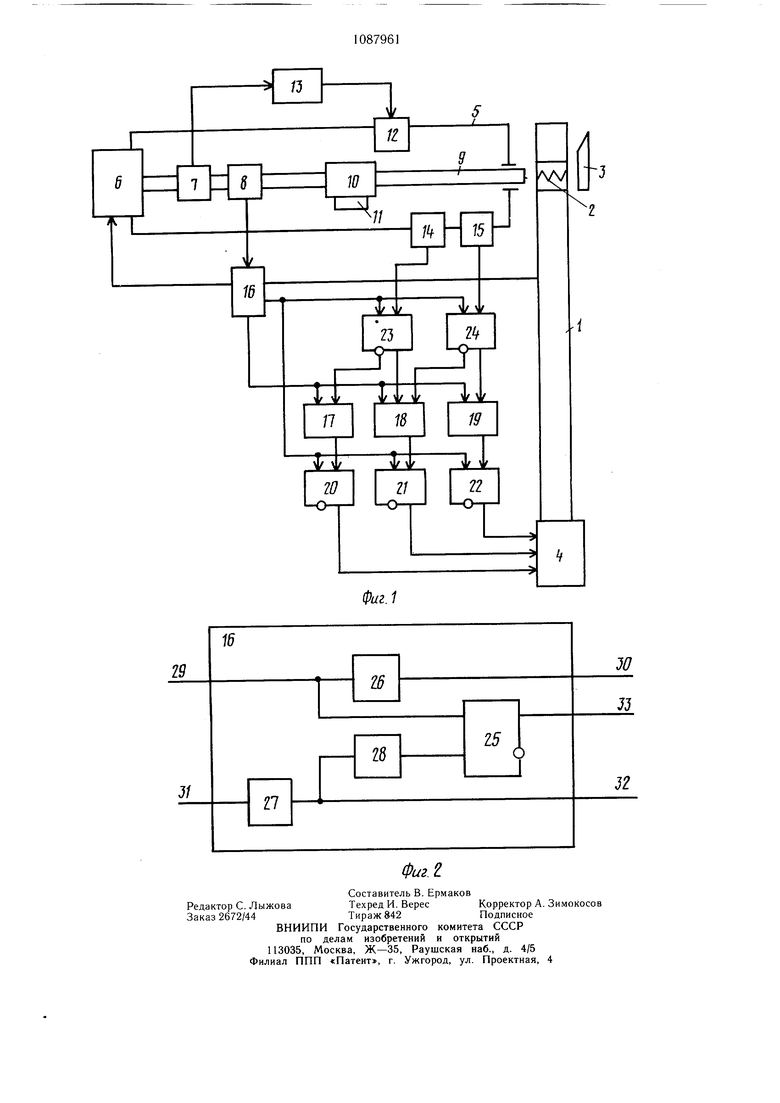
Изобретение относится к измерительной технике и может быть иснользовано для контроля и разбраковки пружин в различных отраслях народного хозяйства. Известен автомат для контроля усилий пружин коммутационных аппаратов, содержащий механизм подачи, привод возвратно-поступательного движения, измерительный блок, эталонные пружины, исполнительный электромагнит, выполняющий функции сортировщика 1. Недостатком данного устройства является невысокая точность контроля сортируемых пружин. Целью изобретения является повышение точности и надежности контроля. Поставленная цель достигается тем, что устройство, содержащее механизм подачи, привод возвратно-поступательного движения, связанный с датчиками предельных усилий, сортирующий механизм и блок управления, имеет измерительный шток, на котором установлена с возможностью продольного перемещения гильза с укрепленным на ней постоянным магнитом и снабженная стопором, усилитель, бесконтактные датчики, триггеры и схемы совпадения, при этом привод возвратно-поступательного движения связан со штоком через бесконтактные датчики и стопор, вход которого связан с выходом усилителя, вход которого связан с датчиком минимального предельного усилия, а датчик максимального предельного усилия связан с входом блока управления, первый выход которого связан с механизмом подачи, второй выход которого связан с приводом возвратно-поступательного движения, причем третий выход блока управления связан с первыми входами всех триггеров, а четвертый выход блока управления связан с первыми входами первой, второй и третьей схем совпадения, выходы которых соединены соответственно с вторыми входами третьего, четвертого и пятого триггеров, единичные выходы которых связаны с входами сортирующего механизма, при этом выходы бесконтактных датчиков связаны с вторыми входами первого и второго триггеров, нулевые выходы которых связаны с вторыми входами первой и второй схем совпадения, единичный выход первого триггера связан с третьим входом второй схемы совпадения, а единичный выход второго триггера связан с вторым входом третьей схемы совпадения. На фиг. 1 представлена структурная электрокинематическая схема устройства; на фиг. 2 - функциональная схема блока управления. Механизм 1 подачи прерывистого движения предназначен для перемещения контролируемых пружин 2 на позицию контроля с торцовой опорой 3 и на позицию сортировки, где расположен сортирующий механизм 4. В корпусе 5 автомата установлен привод 6 возвратно-поступательного движения, связанн-ый через датчик 7 минимального предельного усилия и датчик 8 максимального предельного усилия с установленным с возможностью воздействия в позиции контроля на контролируемую пружину 2 измерительным штоком 9, на котором установлена с возможностью продольного перемещения гильза 10 с укрепленным на ней постоянным магнитом 11. Электромагнитный стопор 12 гильзы 10 установлен в корпусе 5 автомата на пути движения гильзы 10 в направлении контролируемой пружины 2 и через усилитель 13 связан с выходом датчика 7 минимального предельного усилия. В корпусе 5 автомата вдоль траектории движения постоянного магнита 11 установлены первый бесконтактный датчик 14 положения постоянного магнита 11 и второй бесконтактный датчик 15 положения этого магнита. Выход датчика 8 максимального предельного усилия подключен к первому входу блока 16 управления, один из выходов которого соединен с первыми входами схем 17-19 совпадения, третий выход - с первыми входами триггеров 20-24. Выходы первых трех триггеров 20-22 подключены к сортирующему механизму 4, а их другие входы соединены с выходами соответствующих схем совпадения 17-19. Выход первого датчика 14 положения подключен к другому входу четвертого триггера 23, инверсный выход которого соединен с другим входом первой схемы 17 совпадения, а прямой выход - с вторым входом второй схемы 18 совпадения. Выход второго датчика 15 по ложения подключен к второму входу пятого триггера 24, инверсный выход которого соединен с третьим входом второй схемы 18 совпадения, а прямой выход - с другим входом третьей схемы 19 совпадения. Блок 16 управления (фиг. 2) включает триггер 25, первый одновибратор 26, второй одновибратор 27 и схему 28 задержки. К первому входу триггера 25 и к входу первого одновибратора 26 подключена пусковая шина 29, связанная с механизмом 1 подачи прерывистого движения и служащая для синхронизации контроля с подачей пружин 2. Выход первого одновибратора 26 посредством шины 30 сброса связан с первыми (обнуляющими) входами триггеров 20-24. Выход датчика 8 максимального предельного усилия шиной 31 связан с входом второго одновибратора 27, выход которого через шину 32 стробирования связан с входами схем 17-19 совпадения. Кроме трех последних, выход второго одновибратора 27 через схему 28 задержки подключен к другому входу триггера 25, единичный выход которого шиной 33 соединен с управляющим входом привода 6 возвратно-поступательного движения. При работе автомата после остановки очередной пружины 2 пусковой сигнал поступает через шину 29 в
блок 16 управления, через первый одновибратор 26 сбрасывает триггеры 20 и 24, а также запускают триггер 25. Единичный сигнал с выхода этого триггера поступает по шине 33 на вход привода 6 возвратнопоступательного движения, последний начинает через элементы 7, 8, 10 и 9 воздействовать на пружину 2. При достижении максимального предельного усилия срабатывает датчик 8. Сигнал с его выхода поступает по шине 31 на вход второго одновибратора 27. Короткий импульс с его выхода поступает по шине 32 на схемы 17-19 совпадения для проведения разбраковки пружины. Кроме того, импульс с выхода второго одновибратора 27, проходя через схему 28 задержки, сбрасывает триггер 25.
Устройство работает следуюшим образом.
Механизм 1 подачи прерывистого движения периодически перемещает контролируемые пружины 2 сначала на позицию контроля с опорой 3, а затем на позицию сортировки, где расположен сортирующий механизм 4. При остановке механизма 1 подачи очередная пружина 2 оказывается на позиции контроля между неподвижной опорой 3 и измерительным штоком 9. Блок 16 управления сбрасывает триггеры 20-24, после чего привод через датчики 7 и 8 предельных усилий и измерительный шток 9 воздействует на пружину 2. При этом гильза 10 удерживается электромагнитным стопором 12 и не перемещается вместе с измерительным штоком 9. Когда усилие, прикладываемое к контролируемой пружине 2, достигает величины минимального предельного усилия, на выходе датчика 7 появляется сигнал, который усиливается усилителем 13 и вызывает срабатывание электромагнитного стопора 12, в результате чего гильза 10 начинает перемещаться вместе с измерительным штоком 9. В зависимости от жесткости пружины 2 при дальнейшей ее деформации постоянный магнит 11 к моменту срабатывания датчика 8 максимального предельного усилия, не доходит до первого датчика 14 положения, если жесткость пружины выше нормы, останавливается между датчиками 14 и 15 положения, вызывая переключение в единичное состояние четвертого триггера 23, если жесткость пружины в пределах нормы, и достигает датчика 15 положения, вызывая переключение в единичное состояние четвертого и пятого триггеров 23 и 24, если жесткость пружины ниже нормы. В момент ерабатывания датчика 8 максимального предельного усилия блок 16 управления вырабатывает короткий стробирующий импульс, поступающий на первые входы схем совпадения 17-19. В зависимости от состояния
тригеров 23 и 24 переключается в единичное состояние один из триггеров 20-22. Если пружина 2 имеет жесткость выше нормы, то величина деформации ее от минимального предельного усилия до максимального предельного усилия, а значит, и величина перемещения гильзы 10 с постоянным магнитом 11 такова, что не срабатывает ни один из датчиков 14 и 15 положения, не переключаются триггеры 21-24, а триггер 20 с приходом стробирующего импульса устанавливается в единичное состояние, вызывая подготовку сортирующего механизма 4 к отправке контролируемой пружины 2 в брак с повышенной жесткостью. Если пружина 2 имеет жесткость в пределах нормы, то к моменту прихода стробирующего импульса в единичном состоянии оказывается триггер 23, а триггер 24 остается в нулевом состоянии, поэтому стробирующий импульс установит в единичное состояние триггер 21, который подготавливает сортирующий механизм 4 к отправке контролируемой пружины 2 на операцию упаковки годных пружин. Если к моменту прихода стробирующего импульса срабатывают триггеры 23 и 24, то триггер 22 устанавливается в единичное состояние, подготавливая сортирующий механизм 4 к отправке контролируемой пружины 2 в брак с пониженной жесткостью. После прихода стробирующего импульса привод 6 возвращает измерительный шток 9, а вместе с ним и гильзу 10 с постоянным магнитом 11 в исходное состояние, при этом сигналы на выходах датчиков 8 и 7 предельных усилий один за другим пропадают и электромагнитный стопор 12 вновь преграждает путь гильзе 10. После возврашения привода 6 в исходное состояние механизм 1 подачи перемещает проконтролированную пружину 2 на позицию сортировки, где сортирующий механизм 4 в зависимости от состояния триггеров 20-22 направляет ее в нужном направлении. Когда механизм 1 подачи завершает очередной цикл перемещения, на контрольной позиции между измерительным щтоком 9 и опорой 3 оказывается новая пружина 2, а проконтролированная пружина уже выходит из сортирующего механизма 4.
Предложенный автомат для контроля и разбраковки пружин обеспечивает контроль с большей точностью и достоверностью, исключает порчу поверхности пружин. Это достигается тем, что через пружину не пропускается ток, а контроль реальной жесткости осуществляется с помощью постоянного магнита, двух датчиков положения, триггеров, схем совпадения, блока управления и усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля пружин | 1982 |
|
SU1171757A1 |
| Устройство для управления прижимом магнитной ленты к ведущему валу | 1983 |
|
SU1152030A1 |
| Устройство для измерения механических параметров коммутирующих элементов | 1984 |
|
SU1215094A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
| Устройство для управления сортировкой по массе металлических деталей | 1988 |
|
SU1540891A1 |
| Устройство для регулирования подачи воздуха в двигатель внутреннего сгорания | 1989 |
|
SU1746016A1 |
| Устройство для считывания номера транспортного средства | 1982 |
|
SU1050950A1 |
| Устройство для промывки и контроля реле | 1983 |
|
SU1205203A1 |
| Устройство для измерения упругих характеристик пружин | 1982 |
|
SU1016700A1 |
АВТОМАТ ДЛЯ КОНТРОЛЯ И РАЗБРАКОВКИ ПРУЖИН, содержащий механизм подачи, привод возвратно-поступательного движения, совмещенный с датчиками предельных усилий, сортирующий механизм и блок управления, отличающийся тем, что, с целью повыщения точности и надежности контроля, он имеет измерительный щток, на котором установлена с возможностью продольного перемещения гильза с укрепленным на ней постоянным магнитом и снабженная стопором, усилитель, бесконтактные датчики, триггеры и схемы совпадения, при этом щток связан через бесконтактные датчики и стопор с приводом возвратно-поступательного движения, при этом вход стопора связан с выходом усилителя, вход которого связан с датчиком минимального предельного усилия, а датчик максимального предельного усилия связан с входом блока управления, первый выход которого связан с механизмом подачи, второй выход - с приводом возвратно-поступательного движения, третий выход блока управления связан с первыми входами всех триггеров, а четвертый выход блока управления связан с первыми входами первой, второй и третьей схем совпадения, выходы которых соединены соответственно с вторыми входами третьего, четвертого и пятого триггеров, единичные выходы которых связаны с входами сортирующего механизма, при этом выходы бесконтактных датчиков i связаны с вторыми входами первого и второго триггеров, нулевые выходы которых (Л связаны с вторыми входами первой и второй схем совпадения, единичный выход первого триггера связан с третьим входом второй схемы совпадения, единичный выход второго триггера связан с вторым входом третьей схемы совпадения. 00 со о:)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для контроля усилий пружин коммутационных аппаратов | 1978 |
|
SU741237A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
