Изобретение относится к измерительной технике и может использоваться для измерения механических параметров при проверке коммути- рзтощей аппаратуры.
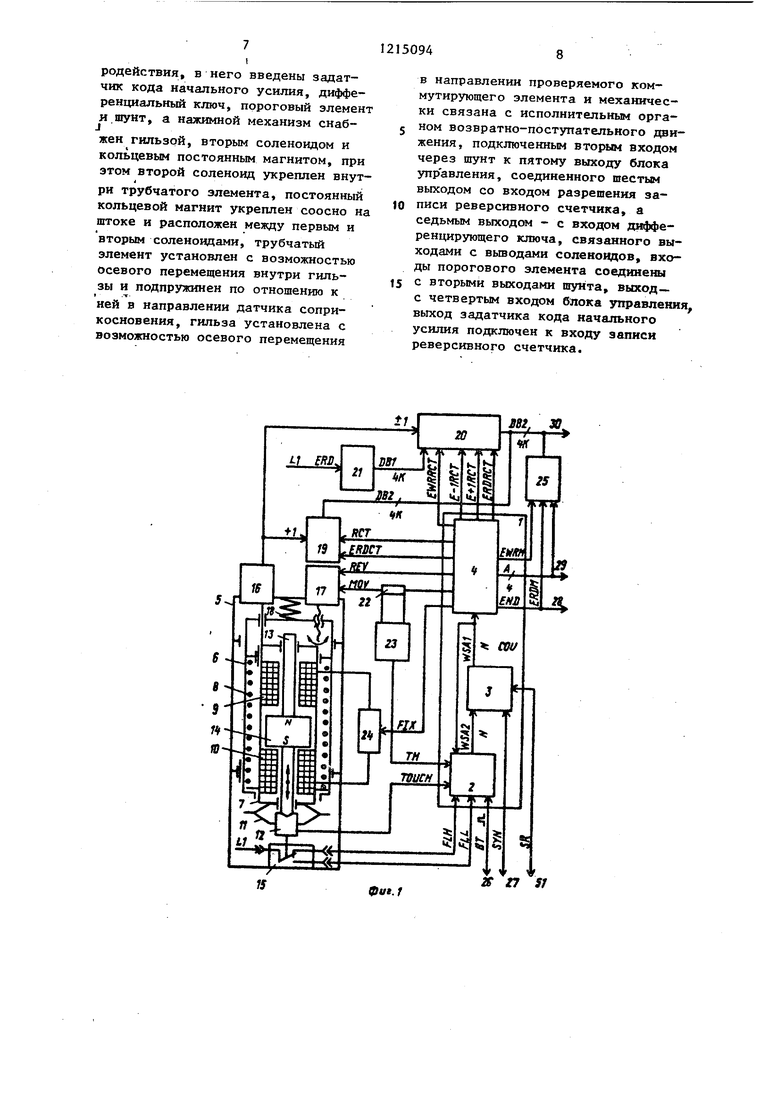
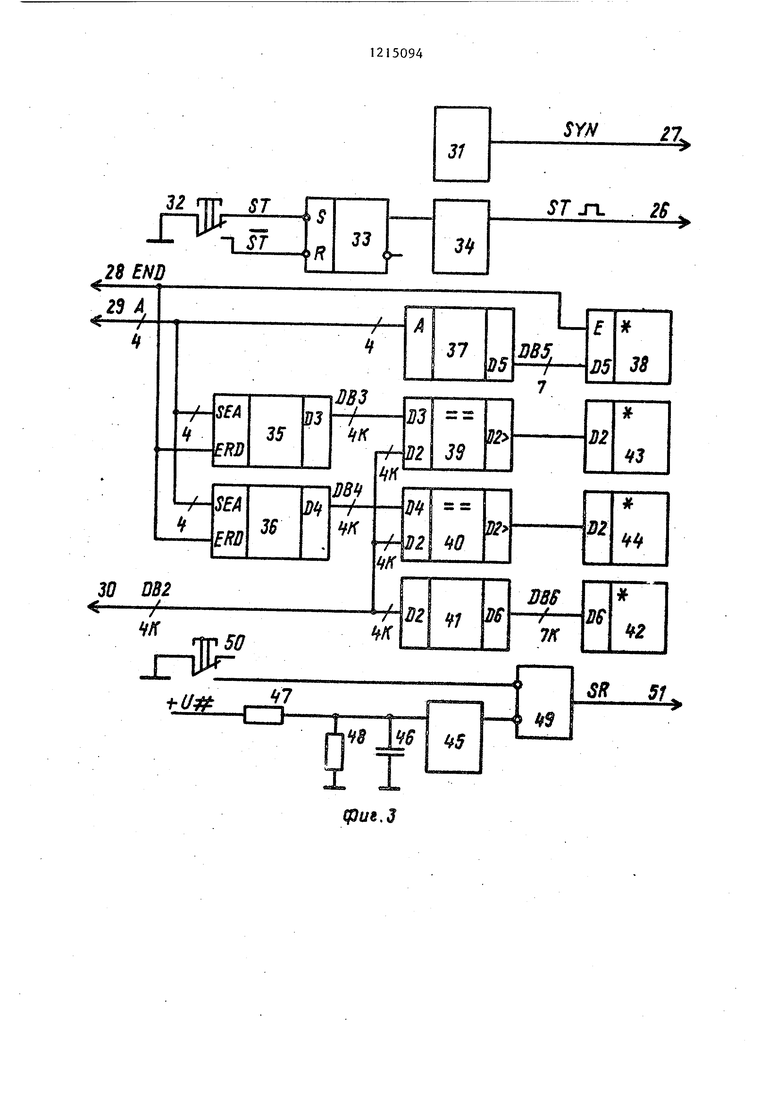
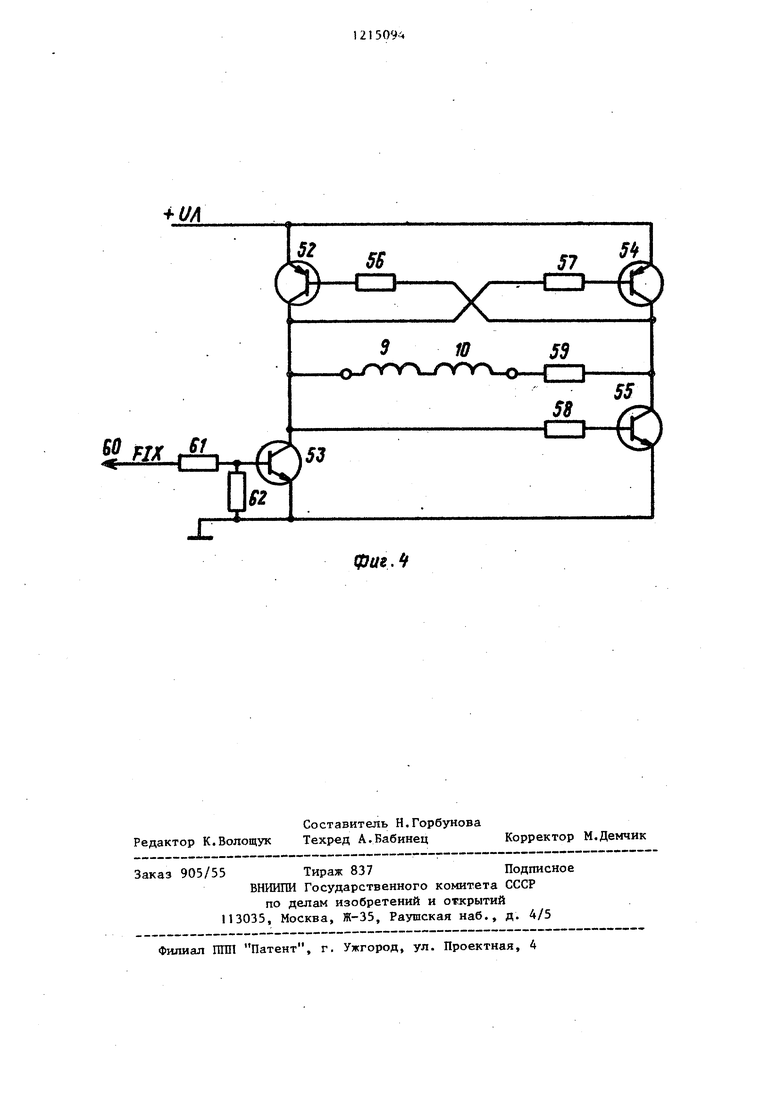
На фиг. 1 показана структурная схема устройства; на фиг. 2 - временная диаграмма работы устройства на фиг. 3 и 4 - примеры реализаций блока анализа параметров и диффе- ренциального ключа.
Устройство содержит блок 1 управления, шифратор 2 состояний, регистр 3 состояний, дешифратор 4, нажимной механизм 5, гильзу 6, трубку 7, пружину 8, соленоиды 9 и 10, упругий элемент 11, датчик 12 соприкосновения, шток 13, кольцевой постоянньй магнит 14, проверяемый электрический аппарат 15, датчик 16 перемещений, исполнительный орган 17 возвратно-поступательного движения, пружину 18, суммирующий счетчик 19, реверсивный счетчик 20, задатчик 21 кода начального усилия, шунт 22, пороговый элемент 23, дифференциальный ключ 24, блок 25 памяти, шину 26 запуска, шину 27 синхронизации, шину 28 окончания измерения, ад- ресную шину 29, шину 30 выдачи результатов, тактовый генератор 31 синхроимпульсов, кнопку 32 Пуск, триггер 33, формирователь 34 одиночного импульса, задатчик 35 кодов максимальных значений параметров, задатчик 36 кодов минимальных значений параметров, преобразователь 37 кодов, индикатор 38, компараторы кодов 39 и 40, преобразователь 41 кода, индикаторы 42-44, дискриминатор 45, конденсатор 46, резисторы 47 и 48, элемент ИЛИ 49, кнопку 50 начальной установки с входом 51 (начальной установки), транзисторы 52резисторы 56-58, балластный резисто 59, входную шину 60 дифференциального югаоча резисторы 61 и 62.
Устройство работает следующим бразом..
Перед запуском устройства в задатчик 21 кода начального усилия заносят код АХ усилия, при котором срабатывает датчик 12 соприкосновения. Эта величина сохраняется в за- датчике 21 в период между двумя очередными поверками устройства.
s 0 5 о ,
Перед началом измерений нового типа коммутирующих аппаратов I5 е задатчики 35 и 36 кодов заносятся соответственно коды максимальных и минимальных допустимых значений параметров по адресам. По первому адресу заносятся граничные значения прямого хода, по второму адресу - граничные значения дополнительного хода, по третьему адресу - граничные значения обратного хода, по четвертому адресу - граничные значения усилия прямого срабатывания.
При включении питания устройства начинает заряжаться конденсатор 46 (фиг. 3)о-До теу. пор, пока напряжение на нем не достигнет уровня срабатывания дискриминатора 45, с выхода последнего поступает сигнал низкого уровня на вход элемента ИЛИ 49. То же происходит при нажатии кнопки 50. При этом сигнал 5R установки системы в исходное состояние по шине 51 поступает на вход начальной установки регистра 3 состояний (фиг. 1).
При нажатии кнопки 32 триггер 33 и формирователь 34 одиночного импульса вьфабатывают пусковой импульс. 5 Т , поступающий по шине 26 на вход шифратора 2 состояний и переводящий устройство из исходного состояния в rtepBoe состояние SAI. При этом на дифференциальный ключ 24 поступает сигнал FIX, которьй открьгаает транзисторы 53 и 54, в результате чего ток течет через соленоиды 10 и 9 по направлению; справа налево (фиг. 4). Магнитный поток, создаваемый соленоидами, перемещает кольцевой постоянный магнит 14 вниз (фиг. 2),при этом шток 13, воздействуя на тьшьную часть датчика 12 соприкосновения, растягивает упругий элемент 11 и фиксирует положение датчика 12 со- пршсосновения относительно трубки 7. При этом гильза 6, трубка 7, шток 13 и датчик 12 соприкосновения образуют единую недеформируемую конструкцию (в пределах упругости пружины 8).
После окончания пускового импульса устройство переходит во второе состояние, при этом на исполнительный орган 17 поступает Сигнал MOV, по которому исполнительный орган 17 перемещает гильзу 6 в направлении коммутирующего аппарата 15. В момент касания в положении XI коммутирующего аппарата 15 датчик 12 соприкосновения вырабатывает сигнал TOUCH, переводящий устройство в третье состояние. При этом на суммирующий счетчик 9 по- стуйает сигнал RCT обнуления, а на реверсивный счетчик 20 поступает сигнал разрешения записи кода EWRRCT, по которому код начального усилия по первой шине данных ДВ1 из задатчика 21 кода начального усилия записывается в реверсивный счетчик 20. Одновременно на этот счетчик поступает сигнал разрешения декрементации E-)RCT. При дальнейшем перемещении из положения XI импульсы, вырабатьшаемые датчиком 16 перемещений, поступают на счетные входы счетчиков 19 и 20. Суммирующий счетчик 19 при этом измеряет перемещение датчика I2 соприкосновения из положения XI, реверсивный счетчик работает в режиме вычитания величины перемещен ния из кода начального усилия АХ (приведенного к величине перемещений путем учета коэффициента упругости упругого элемента П). Когда в положении ХЗ контакт коммутирующего аппарата 15 переключается и сигнал FLH замыкания НЗ контакта (верхнего) сменяется сигналом FLL замыкания HP контакта (нижнего), устройство переходит в четвертое состояние, при этом сигнал E-1RCT снимается, а на,адресном А выходе дешифратора 4 состояний появляется код первого параметра, поступающий на адресный вход блока 26 памяти параметров. Одновременно вырабатьшаются короткие импульсы считывания счетчика 19 (ERDCT) и записи в память 25 (EWRM), при этом величина кода прямого хода (X3-Xl) из счетчика 19 по второй шине данных ДВ2 записывается в блок 25 памяти по первому адресу, после чего счетчик I9 вновь обнуляется и начинает заполняться, измеряя перемещения датчика 12 соприкосновеш я
из положения ХЗ.
При дальнейшем воздействии на коммутирующий аппарат 15 усилие нажатия повыпшется, поэтому возрастает и ток через шунт 22. Если усилие не Возрастет настолько, чтобы сработал пороговый элемент 23,
215094
датчик I2 соприкосновения остановится вследствие окончания дополнительного хода, то трубка 7 также остановится и датчик 16 перемещений
5 перестанет вырабатьшать импульсы, а в счетчике 19 запомнится величина кода дополнительного.хода Х5-ХЗ. При этом создаваемое исполнительным органом 17 усилие перемещает гильзу
10 .6. которая деформирует пруткину 8. Когда нагрузка возрастет настолько, что Сработает пороговый эле:мент 23, сигнал ТН переведет устройство в пятое состояние. Переход в это
15 состояние может произойти и без деформации пружины 8, если пороговый элемент 23 настроен на более низкий уровень. При переходе устройства в пятоесостояние происходит переза20 пись кода дополнительного хода из счетчика 19 в память 25 по второму адресу и последующее обнуление счетчика 19, а также реверс исполнительного органа 17 подачей сигнала REV.
25 При обратном перемещении датчика 12 соприкосновения счетчик 19 измеряет величину обратного хода из положения Х5 до положения Х2, где происходит обратное переключение комму30 тирующего аппарата 15, и устройство переходит в шестое состояние с од- ; новременной перезаписью кода Х5-Х2 обратного хода из счетчика 19 в блок 25 памяти по третьему адресу, ри
35 дальнейшем перемещении вверх измерения не проводятся.
В положении X1 датчик 12 соприкосновения отрьгоается от коммутирующего аппарата 15, устройство пе4Q реходит в седьмое состояние, сигналы REV и FIX снимаются. При этом ток через соленоиды 9 и 10 меняет направление, кольцевой постоянный магнит 14 перемещается вверх, а шток
5 13 освобождает датчик 12 соприкосновения, который занимает положение, определяемое упругим элементом JI.
При перемещении трубки 7 вниз в положение XI датчик 12 соприкоснове
ния вновь касается коммзггирующего аппарата 15, устройство переходит в восьмое состояние, на реверсивный счетчик 20 подается сигнал E+1RCT разрешения инкрементации,
55 и этот счетчик начинает суммировать импульсы с датчика 16 перемещений. Перемещение трубки 7 в этом режиме на величину деформации упругого
элемента 11 превьшает перемещение датчика 12 соприкосновения. Когда происходит прямое срабатьюание коммутирующего аппарата 15, трубка 7 проходит путь Х4-Х1, а датчик 12 соприкосновения - путь ХЗ-Х1. В эт момент устройство переходит в девятое состояние и по сигналам разрешения записи в блок 25 памяти (EWRM) и разрешения чтения из реверсивного счетчика 20 (ERDRCT) происходит перезапись величины кода усилия из реверсивного счетчика 20 по четвертому адресу блока памяти 25 через вторую шину данных Величина кода ХУ в этом счетчике действительно является величиной кода усилия прямого срабатывания, приведенного к деформации упругого элемента 11:
ХУ /Х4-Х1/ -/ХЗ-Х1/ +АХ Х4-ХЗ+АХ.
При переходе устройства в девятое состояние вновь включается сигнал реверса исполнительного органа 17 и нажимной механизм 5 возвращается в исходное состояние, освобождая коммутирующий аппарат 15. Когда срабатывает пороговый элемент 23, устройство переходит в десятое состояние. При этом исполнительный орган 17 выключается, снимается сигнал реверса и вырабатвается сигнал окончания измерений END, по шине 28 поступающий в блок анализа (фиг. З) на вхоД Е разрешения индикации номера параметра индикатора 38, разрешения чтения предельных значений этих параметров из задатчиков 35 и 36, а также поступает на вход разрешения чтения из блока 25 памяти.
В десятом и последующих состояниях блок 1 управления вырабатывает поочередно коды адреса по шине 29. При этом код соответствующего параметра считьгоается из блока 25 памяти и по второй шине данных 30 (DB2) поступает на входы Д2 компараторов 39 и 40 кодов и преобразователя 41 двоично-десятичного кода в код .засветки семисегментно- го индикатора 42 величины параметра. На другие входы компараторов 39 и 40 кодов поступают соответственно коды максимального и минимального допустимых значений
этих параметров считываемые нз задатчиков соответственно 35.и 36 по тому же адресу. Результаты срав- нения кодов параметров с их.граничными значениями поступают на индикаторы 43 (больше нормы) и 44 (меньше нормы). Код адреса, соответствующий номеру параметра, через кодо- 0 преобразователь 37 поступает на се- мисегментный индикатор 38 номера параметра.
В результате проверки высвечи- ваются номер параметра, результат, контроля (больше или меньше нормы и величина параметра. Все параметры высвечиваются поочередно в соответствии с адресом, вырабатьшаемым блоком 1 управления, до начала контроля следующего коммутирующего аппарата .
Формула изобретения
Устройство для измерения механических параметров коммутирующих элементов, содержащее датчик перемещения, нажимной механизм, включающий исполнительный орган возвратно- поступательного движения, трубчатый элемент, внутри которого укреплен первый соленоид, а на конце трубчатого элемента установлен упругий элемент с датчиком соприкосновения, шток, расположенный внутри трубчатого элемента с возможностью воздействия через датчик соприкосновения на проверяемьй коммутируемый зле
мент, причем подвижная часть
датчика перемещения связана с трубчатым элементом, а выход дат- чика перемещения подключен к счетным входам суммирующего и реверсивного счетчиков, первый вход исполнительного органа возвратно-поступа тельного движения подключен к первому выходу блока управления, соединенного первым входом с выходом датчика соприкосновения, вторым и
третьим входами - с информационными входами устройства, вторым выходом - с входом сброса суммирующего счетчика, а третьим и четвертым выходом - соответственно с входом
разрешения декрементации и инкре- ментации реверсивного счетчика, отличающееся тем, что, с целью повышения точности и быстродействия, в него введены задат- чик кода начального усилия, диффе- рен1Щальный ключ, пороговый элемент и,шунт, а нажимной механизм снабжен гильзой, вторым соленоидом и кольцевым постоянным магнитом, при этом второй соленоид укреплен внутри трубчатого элемента, постоянный кольцевой магнит укреплен соосно на штоке и расположен между первым и вторым солено1адами, трубчатый элемент установлен с возможностью осевого перемещения внутри гильзы и подпружинен по отношению к
.Г-
ней в направлении датчика соприкосновения, гильза установлена с возможностью осевого перемещения
в направлении проверяемого коммутирующего элемента и механически связана с исполнительным орга- ном возвратно-поступательного движения, подключенным вторым входом через шунт к пятому выходу блока управления, соединенного шестым выходом со входом разрешения записи реверсивного счетчика, а седьмым выходом - с входом дифференцирующего ключа, связанного выходами с выводами соленоидов, входы порогового элемента соединены
с вторыми выходами шунта, выход- с четвертым входом блока управления, выход задатчика кода начального усилия подключен к входу записи реверсивного счетчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля растворов и провалов контактов электрических аппаратов | 1982 |
|
SU1120289A1 |
| Устройство для проверки коммутирующей аппаратуры | 1982 |
|
SU1023258A1 |
| Устройство для определения качества изделий по электрической прочности изоляции | 1990 |
|
SU1746335A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| Устройство для управления прижимом магнитной ленты к ведущему валу | 1983 |
|
SU1152030A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство для проверки коммутирующей аппаратуры | 1978 |
|
SU781718A1 |
| Источник импульсного магнитного поля | 1988 |
|
SU1529154A1 |
| Устройство для контроля состояния критической ситуации | 1990 |
|
SU1737412A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |

Изобретение относится к измерительной технике и может быть использовано для измерения механических параметров при проверке коммутирующей аппаратуры. Устройство содержит блок управления, суммирующий счетчик, реверсивный счетчик, датчик перемещений, нажимной механизм, дифференциальный ключ, задатчик кода начального усилия, пороговый элемент, шунт. Введение задатчика кода начального усилия, порогового элемента, шунта, дифференциального ключа, а в нажимной механизм - гильзы, второго соленоида и кольцевого магнита с соответствующими связями позволяет увеличить точность и быстродействие устройства. 4 ил.
5-Л
г
фut.f
фи.1
- - -uz.ff
.28 SND
57 J. 2S
(pui.3
-t-aA
10
53
во
58
55
фаг Л
| Устройство для проверки коммутирующей аппаратуры | 1981 |
|
SU991334A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для проверки коммутирующей аппаратуры | 1982 |
|
SU1023258A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
