1 1
Изобретение относится к радиоэлектронике и может быть использовано, например, в аппарате контроля блоков радиоаппаратуры.
Цель изобретения - повышение надежности при одновременном повышении производительности.
Поставленная цель достигается тем, что устройство снабжено дополнительным рядом подвижных рамок, подключение которыхначинается пос ле подключения как минимум одной платы нижнего ряда.
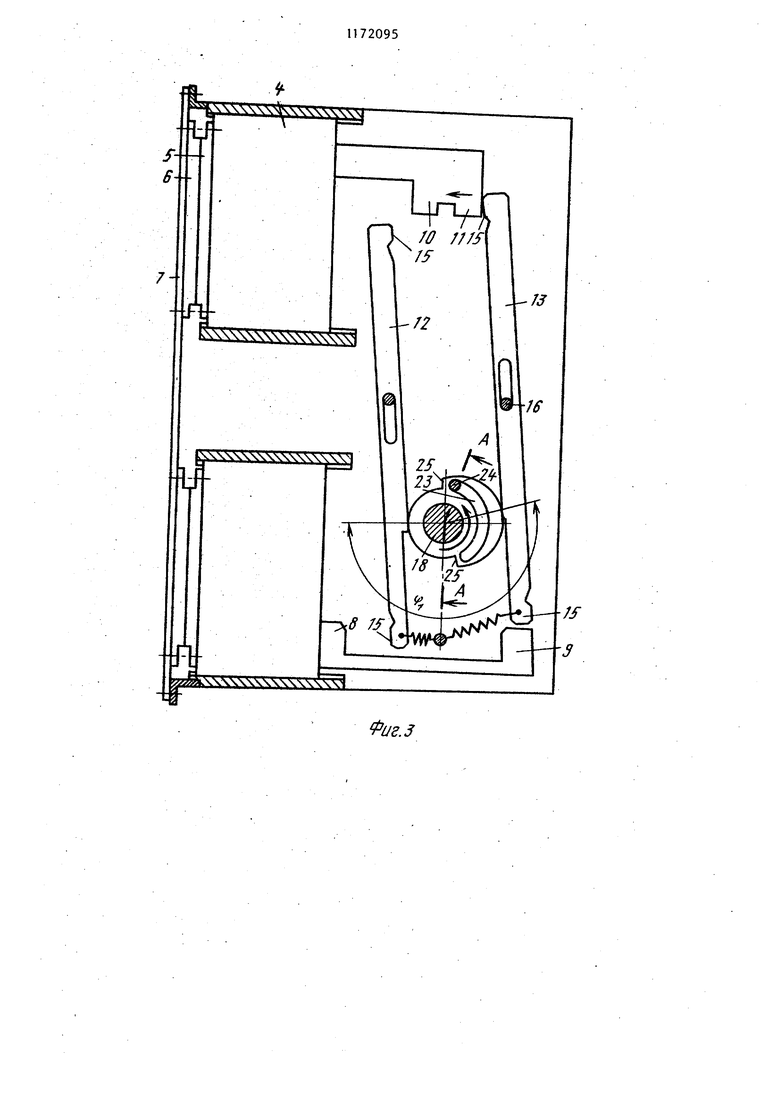
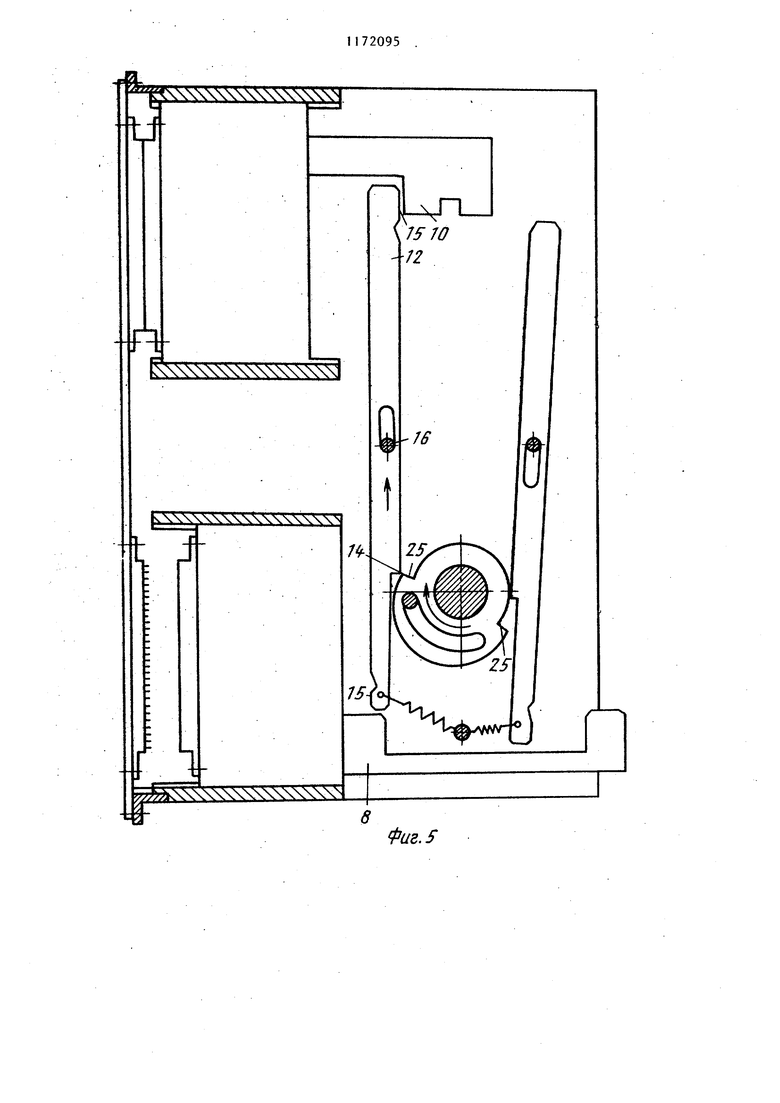
На фиг. 1 показано устройство, общий вид в положении подключения нижнего ряда разъемов блока РЭА, на фиг. 2 - то же, взаимодействие элементов зацепления одного из кулачков с подпружиненными планками при подключении блока; на фиг. 3 - то же, в положении подключения верхнего ряда разъемов; на фиг. 4 - то же, в положении отключения нижнего ряда разъемов , на фиг. 5 - то же, взаимодействие элементов зацепления одного из кулачков с подпружиненными планками при отключении блока; на фиг. 6 - то же, в положении отключения верхнего ряда разъемов блока; на фиг. 7 - разрез А-А на фиг. 3.
Устройство для подключения радиоэлектронных блоков содержит корпус 1 с направляющими пазами 2 для размещения подвижных рамок 3 и 4, расположенных в первом и во втором рядах соответственно. На подвижных рамках 3 и 4 закреплены разъемы 5, служащие для сочленения с разъемами 6 радиоэлектронных блоков 7 и соединенные монтажом с электронным контрольным устройством (не показано).
Кроме того, на подвижных рамках 3 попарно установлены ограничительные упоры 8 и 9, а на рамках 4 - ограничительные упоры 10 и 11.
Устройство содержит попарно расположенные, подпружиненные планки 12 и 13 с элементами 14 зацепления. На концах подпружиненных планок расположены опорные поверхности 15, а в средней часту - пазы, служащие для размещения направляющих упоров 16 закрепленных в корпусе 1. В боковых стенках корпуса 1 расположены неподвижные опоры 17 механизма перемещения подвижных рамок 3 и 4 и подпружиненных планок 12 и 13, выполненного в виде ва-па 18 с кулачками 19 и
20952
20 и приводной шестерни 21. Кулачок
19жестко закреплен на валу 18 с помощью шпонки 22, а остальные кулачки
20свободно сидят на нем и имеют 5 дугообразные пазы 23. Кроме того,
торцы кулачков 19 и 20 снабжены штифтами 24, размещенными внутри дугообразных пазов 23, а боковые поверхности, содержат элементы зацепления, выполненные в виде канавок 25 с профилем, соответствующим форме зубьев 14 на подпружиненных планках 12 и 13. Последние находятся в силовом зацеплении с кулачками 19 и 20
5 с помощью пружин 26, одними концами . закрепленных на конце планок, а вторыми - на корпусе 1.
подпружиненные планки 12 и 13 под действием собственного веса и пружин
0 26 стремятся занять нижнее положение. Ограничительные упоры 10 и 11 дополнительного ряда подвижных рамок установлены между подпружиненными планками с зазором относительно опорных и торцовых поверхностей планок при их нижнем положении.
Устройство работает следующим образом.
От привода (не показан) через
0 шестерню 21, вал 18 и шпонку 22 сообщается вращение кулачку 19, при вращении которого его штифт 24 скользит по дугообразному пазу 23 соседнего кулачка пока не доходит до конца этого паза, после чего начинает вращаться кулачок 20, расположенный рядом с кулачком 19. С аналогичными паузами, определяемыми длиной дугообразных пазов 23, начинают вращатьQ ся остальные кулачки 20.
Кулачки 19 и 20, оказывая давление на подпружиненные планки 12 и 13, через ограничительные упоры 8 и 11 или 9 и 10 передают усилие
5 на подвижные рамки 3 и 4 и заставляют их перемещаться.
В положении отключения (фиг. 6) с помощью захватов (не показаны) устройство скрепляют с блоком 7,
0 содержащим два ряда разъемов 6. Для подключения разъемов 5 подвижных рамок 3 и 4 к разъемам 6 радиоэлектронных блоков 7 валу 18, а вместе с ними кулачку 19 сообщается враще5 ние против часовой стрелки (фиг.1-3).
В положении, показанном на фиг.1, вращающийся кулачок разворачивает подпружиненную планку 12 относитель- 3 но закрепленного на корпусе направлякхцего упора 16, при этом опорная поверхность 15 нижнего плеча планки прижата к ограничительному упору 8, и подвижная рамка 3 перемещается в направлении подключения, разъем 5 рамки сочленяется с разъемом 6 радиоэлектронного блока. За счет того что подпружиненная планка 12 находится в нижнем положении, опорная поверхность 15 верхнего плеча планк 12 находится ниже ограничительного упора 10 подвижной рамки 4 и не вступает с ней во взаимодействие. Канавки 25 расположены на противоположных сторонах кулачка, одна из которых входит в зацепление с зу бом 14 планки 12, а вторая - с зубо планки 13 в зависимости от направле ния вращения кулачка. При дальнейшем вращении кулачка (фиг. 2) канавки 25 проскальзывают относительно зуба 14 планки 12 и, вступая в зацепление с зубом 14 планки 13, поднимают ее. При этом планка 13 меняет свое положение относительно направляющего упора 16, ее опорная поверхность 15 верхнего плеча размещается против ограничительного упора 11 рамки 4, а опорна поверхность 15 нижнего плеча устана ливается выше ограничительного упора 9 рамки 3. Последующий разворот кулачка в направлении против часовой стрелки (фиг. 3) вызывает поворот подпружиненной планки 13 относительно оси, верхнее плечо планки производит пер мещение рамки 4 и сочленение разъемов 5 и 6, а нижнее плечо проскальзывает над ограничительным упором 9, не вызывая перемещения рамки 3 в направлении отключения. Если взять за начальный момент времени положение ведущего кулачка (фиг. 1) и соответствующее подключе нию первой рамки основного ряда, то первая рамка дополнительного ряда будет подключена после поворота ведущего кулачка на угол cf, (фиг. 3). Каждая из последующих рамок допо нительного ряда подключается через время, соответствуюп1ее развороту элементов зацепления на торцах сосе них кулачков на угол (fj, (фиг. 2), т.е. пог(кг1юче}те производится анало ГИЧ1ГО рамкам основного ряда. 954 Для отключения разъемов 5 подвижных рамок 3 и 4 от разъемов 6 радиоэлектронных блоков 7 валу 18, а вместе с ним и кулачкам 19 и 20 сообщается вращение по часовой стрелке (фиг. 4-6). В положении, показанном на фиг. 4, вращающийся кулачок разворачивает подпружиненную планку 13 относительно упора 16, при этом опорная поверхность 15 нижнего плеча планки прижата к ограничительному упору 9, и подвижная рамка 3 перемещается в направлении отключения, разъем 5 рамки 3 отключается от разъема 6 радиоэлектронного блока 7. Подпружиненная планка 13 находится в нижнем положении, ее опорная поверхность 15 верхнего плеча находится ниже ограничйтельного упора 11 рамки 4 и не вступает с ним во взаимодействие. Контактирование верхнего плеча планки 13 с упором 11 привело бы к подключению рамки 4 к блоку 7. При дальнейшем вращении кулачка Против часовой стрелки (фиг. 5) рамка 3 нижнего ряда остается в отключенном относительно блока 7 положении за счет того, что элемент зацеп.ления (канавка) кулачка контактирует, с элементом 1.4 зацепления подпружиненной планки 12, поднимает последнюю по направляющему упору 16 и выводит нижнее плечо 15 планки 12 из зацепления с ограничительным упором 8. В верхнем положении планки 12 ее верхняя опорная поверхность 15 размещается против ограничительного упора 10 рамки 4. При последующем повороте кулачка происходит разворот планки 12 на упоре 16, ее нижнее плечо проходит над упором 8, а верхнее (фиг. 6) перемещает рамку 4 в положение от- ключения. Таким образом, весь блок 7 оказывается отключенным от контрольно-измерительной аппаратуры. Технико-экономические преимущества предлагаемого устройства для подключения радиоэлектронных блоков по сравнению с известным заключаются в повьшении производительности работы устройства за счет возможности перемещения двух рядов рамок в одном направлении с помощью одного механизма перемещения, а не двух, которые требуются при использовании известного устройства. Выполнение
подпружиненных планок в виде двуплечих рычагов и закрепление направляющих упоров на корпусе позволяет использовать движение подпружиненной планки, осуществляемое при выводе ее из зацепления с ограничительным упором нижней рамки, для перемещения подвижной рамки, находящейся в верхнем ряду. Причем это перемещение осуществляется с паузой по времени после подключения подвижной рамки нижнего ряда, что позволяет произвести одновременное подключение разъемов, находящихся в разных зонах, при минимальной деформации подключаемого блока и надежном сочленении с контрольно-измерительной аппаратурой.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подключения радиоэлектронных блоков | 1985 |
|
SU1307612A2 |
| Устройство для подключения радиоэлектронных блоков | 1986 |
|
SU1316101A1 |
| Устройство для подключения радиоэлектронных блоков | 1982 |
|
SU1083419A1 |
| Устройство для подключения радиоэлектронных блоков | 1984 |
|
SU1182694A1 |
| Устройство для подключения и закрепления радиоэлектронных блоков | 1980 |
|
SU919169A1 |
| Устройство для подключения печатных плат | 1980 |
|
SU984086A1 |
| Устройство для установки радиоэлектронных блоков | 1985 |
|
SU1267637A1 |
| Радиоэлектронный блок | 1988 |
|
SU1598233A1 |
| Приборный корпус радиоэлектронной аппаратуры | 1980 |
|
SU894890A1 |
| Устройство для подключения печатных плат | 1989 |
|
SU1706068A1 |




УСТРОЙСТВО ДЛЯ ПОДКЛЮЧЕНИЯ РАДИОЭЛЕКТРОННЫХ БЛОКОВ, содержащее набор параллельно установленных в направляющих корпуса подвижных рамок с разъемами и попарно расположенными ограничительными упорами, механизм перемещения прдвижных ра мок, выполненный в виде поворотных кулачков с симметричными канавками и подпружиненных планок, содержащих, зубья по форме канавок на кулачках и продольные пазы, в которых размещены направляющие упоры, установленных с возможностью возвратно-поступательного перемещения и поворота относительно нап равлякицих упоров и взаимодействия концами планок с ограничительными упорами рамок, отличающееся тем, что, с целью повышения надежности при одновременном повышении производительности, оно снабжено дополнительным ряДом прдвижных рамок, направляющие упоры закреплены на корпусе между основным и дополнительным рлдами подвижных рамок, подпружиненные планки выполнены в виде двуплечих рычагов с возможностью поочередного 9 взаимодействия противоположных плеч каждого рычага, с ограничительными (Л упорами основного и дополнительного рядов подвижных рамок, причем ограничительные упоры дополнительного ряда подвижных рамок установлены между подпружиненными планками на расстояниях от направляющих уцоров, больших длины взаимодействующего плеча подпружиненной планки, равной расстоянию от конца планки до про- : дольного паза.
-ц6- 7-
ии
г./
ГУХ Х ХХ- ЧЧЧЧЧУ
t А
ffj
Фиг.
/7
ш.и u u u/
/7 /;
Фиг-7
| Каркас для электрорадиоаппаратуры | 1980 |
|
SU919168A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для подключения радиоэлектронных блоков | 1982 |
|
SU1083419A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
