Изобретение относится к радиоэлектронике и может быть использовано, например, в аппаратуре контроля блоков радиоаппаратуры, панелей и рам ЭВМ после сборки и монтажа, а также в аппаратуре контроля печатных плат после распайки на них разъемов.
Цель изобретения - повьшение надежности работы устройства путем фиксации подвижных рамок в положениях подключения и отключения.
Поставленная цель достигается тем, что в устройстве для подключения все кулачки механизма перемещения рамок свободно установлены на валу, опорные поверхности элементов зацепления кулачков размещены под одинаковьми углами относительно максимальных радиусов на рабочих профилях .
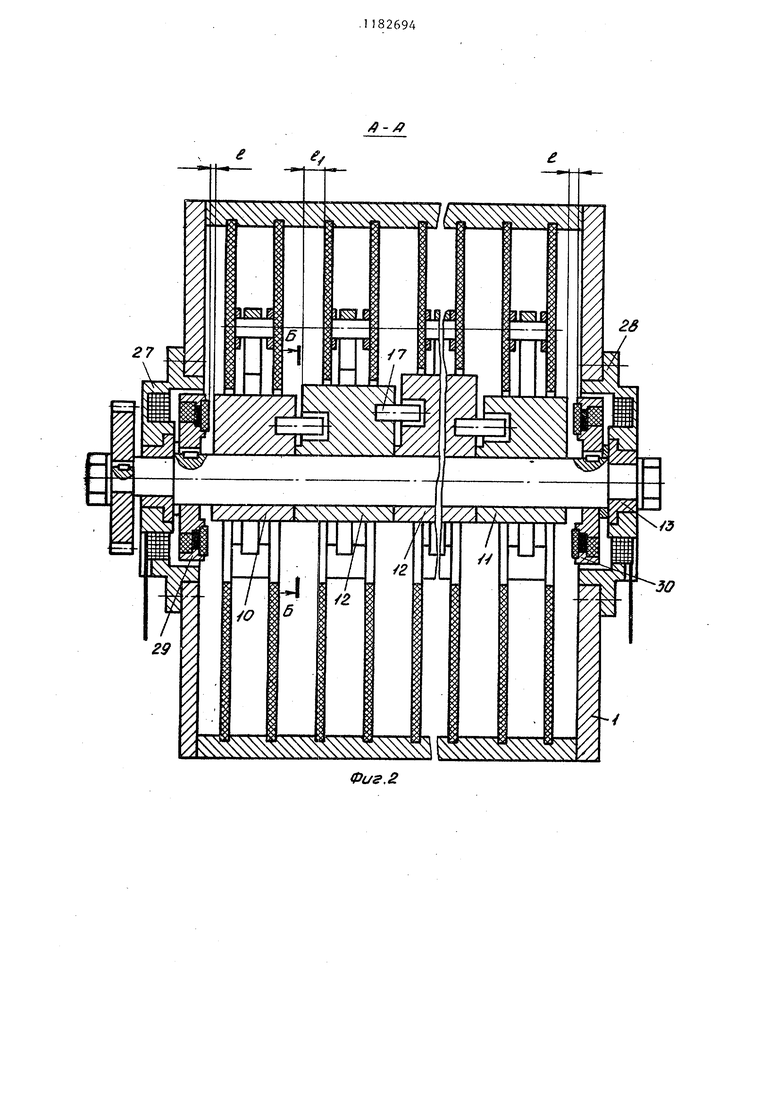
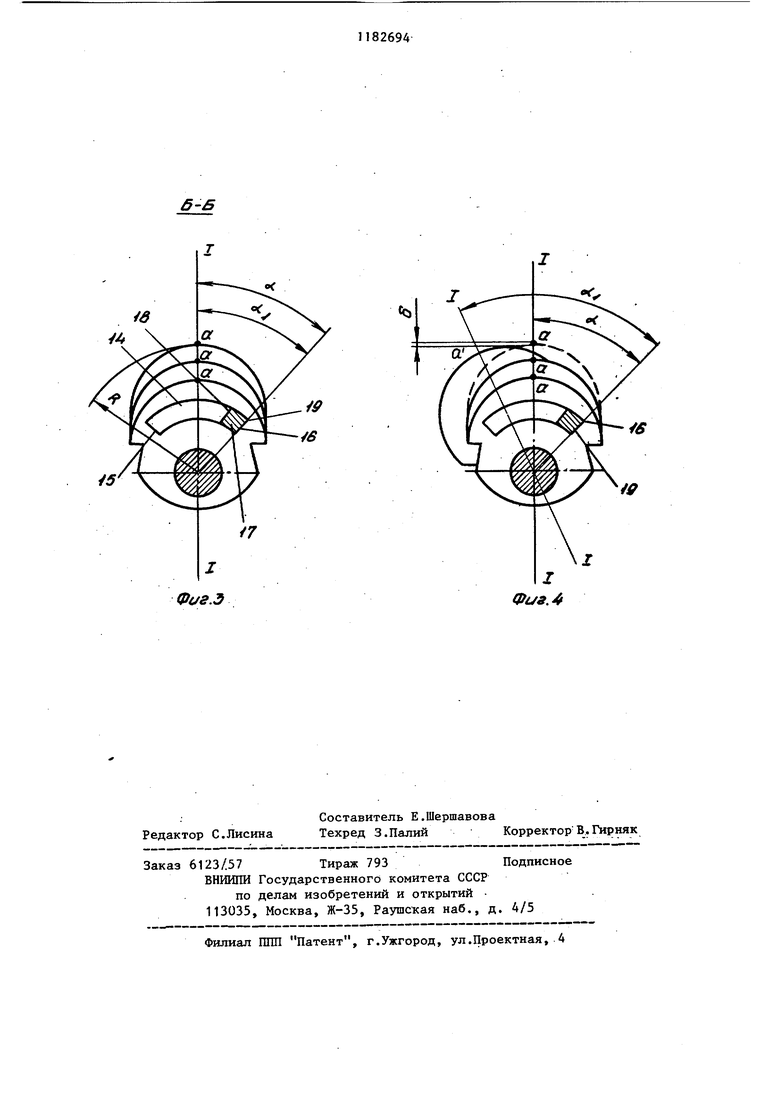
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг.- 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг.2 (кулачки в момент взаимодействия опорных поверхностей элементов зацепления, расположенных под одинаковыми углами); на фиг. 4 - то же, при расположении опорных поверхностей под разными углами относительно рабочего профиля.
Устройство для подключения радиоэлектронных блоков содержит корпус 1 с направляющими 2 для размещения подвижных рамок 3. На рамках закреплены разъемы 4, служащие для сочленения с разъемами 5 блоков 6, и контрольные разъемы 7, соединенные монтажом с разъемами 4. Подвижные рамки 3 имеют окна 8, в которых размещены вал 9 с крайними кулачками 10 и 11 и средниИИ кулачками 12. Вал 9 установлен на неподвижных опорах 13. Кулачки 10 - 12 Ьвободно установлены на валу и снабжены элементами зацепления, выполненными в виде дугообразных пазов 14, ааканчивающихся опорными поверхностями 15 и 16 выступов 17с опорными поверхностями 18 и 19, размещенными внутри дугообразных пазов 14 соседних кулачков и входящих в зацепление с опорными поверхностями 15 и 16. На подвижных рамках 3 по обе стороны от окна В установлены ограничительные упоры 20, а с третьей стороны над окном закреплены направляющие упоры 21 на которых размещены подпружиненные планки.22. Последние содержат пазы 23, в которых размещены направляющие
упоры 21; планки с помощью пружин 24 прижимаются к кулачкам 10-12 механизма перемещения. Планки 22 снабжены зубьям 25, а соприкасающиеся с планками рабочие поверхности кулачков 10 - 12 - профильными канавками 26 по форме зубьев, причем зубья 25 и канавки 26 выполняют функции элементов зацепления. С обеих сторон набора кулачков установлены две муфты 27 и 28 сцепления, включающие в себя ведущие полумуфты 29 и 30, закрепленные шпонками на валу 9 и ведомые полумуфты, одновременно являющиеся кулачками 10 и 11.
Опорная поверхность 16 каждого дугообразного паза 14 выполнена под углом ci к плоскости 1-1 , проходящей через центр вращения кулачка, и точку о. являющуюся точкой максимального радиуса R на рабочем профиле. Опорная поверхность 19 каждого выступа 17 выполнена под углом о, к плоскости I-I (фиг. 3). Для подключения блоков радиоэлектронной аппаратуры с однотипными разъемами применяются кулачки с одинаковым рабочим профилем и одинаковым максимальным радиусом. Для контроля блоков радиоэлектронной аппаратуры с разъемами различных типов применяются кулачки с разными максимальными радиусами рабочего профиля, соответствующим разным величинам перемещения подвижных рамок. Момент контактирования точки а максимального радиуса R кулачка с подвижной рамкой 3 соотвествует фиксироваМному положению рамки. Необходимым условием повьшения надежности работы путем фиксации подвижных рамок в положении подключения и отключения является вьтолнение условия равенства углов oi ot( (фиг. 3). В этом случае при зацеплении дугообразных пазов 14 с выступами 17 своими опорными поверхностями 16 и 19 точки сх максимальных радиусов на рабочих профилях всех кулачков расположены в одной плоскости 1 1 . При этом набор кулачков 10 - 12 образует жесткую систему, способную точками а максимальных ради.усов рабочих профилей кулачков надежно удерживать подвижные рамки 3 в положениях подключения или отключения.
На фиг. 4 показан пример выполне- ния кулачков 10 - 12 с расположением опорных поверхностей 16 и 19 под разными углами относительно максимальных радиусов на рабочих профилях проведенньЬс из центра вращения соответствующих кулачков, т.е. 0 0, . Если один из кулачков своей точкой о, зафиксировал подвижную рамку 3 в положении подключения или отключения,, то точка CL соседнего кулачка сместилась из этого положения и заняла положение д, , между рабочим профилем кулачка и подвижной рамкой образовался зазор сГ в пределах которого возможно произвольное движение рамки (фиг, 4). Таким образом, этот кулачок уже не фиксирует свою подвижную рамку в положении подключения или отключения. Для ориентации набора кулачков устройство снабжено механизмом позиционирования (не .показан), закрепленным на корпусе 1 и выполненным,например, в виде сис,темы фототриод - лампочка и выдающим сигналы управления на останов двигателя в моменты, когда кулачки 10 - 12 фиксируют рамки 3 в положениях подключения и отключения Муфты 27 и 28 сцепления выполнены электромагнитными, их ведомые полумуфты 10 и 11, выполняющие функцию кулачков, установлены с возможностью осевого смещения и изготовлены из . магнитопроводного материала. Величина осевого смещения 6 (фиг. 2) ведомых полумуфт 10 и 11 выбрана меньше чем длина контактной поверхности 6, элементов зацепления соседних кулачков, т.е. выступ 17 заходит в дугообразный паз 14 на длину, большую, чем осевое смещение полумуфты (t( Устройство работает следующим образом. С помощью захватов (не показаны) устройство скрепляется с радиоэлектронным блоком 6. Реверсивный привод механизма перемещения рамок (не показан) сообщает вращение валу 9 и ве дущим полумуфтам 29 и 30 муфт 27 и 28 сцепления. Если в этом случае вра щение вала 9 производится против часовой стрелки (фиг. 1), ток пропускается через обмотку катушки возбуждения муфты 27, полумуфта, кулачок 10, сцепляется с ведущей полумуфтой 29, выбирая зазор 2. Кулачок 10, из всего набора начинающий вращаться первым, прижимает левую планку 22 к ограничительному упору 20 и перемещает рамку 3 в направлении сочленения разъемов 4 и 5. При дальнейшем вращении кулачка 10, его канавка 26 входит в зацепление с зубом 25 правой подпружиненной планки 22, поднимает ее и сбрасывает на наклонную поверхность ограничительного упора 20, где не происходит передача усилия с кулачка на подвижную рамку 3. В начале вращения кулачка 10 соседний с ним кулачок 12 остается неподвижным, а выступ 17 кулачка 10 скользит по дугообразному пазу 14 кулачка 12 до тех пор, пока опорная поверхность 18 не входит в зацепление с опорной поверхностью 15, после чего начинается совместное вращение кулачков 10 и 12. Аналогично начинает вращаться весь набор кулачков, причем точки Омаксимальных радиусов кулачков повернуты друг относительно друга на угол перемещения выступа 17 в дугообразном пазу 14, т.е. перемещение рамок 3 производится поочередно и не вызывает деформации блока радиоэлектронной аппаратуры 6. Вращение вала 9 в цаправлении против часовой стрелки соответствует двум видам операций, осуществляемых поэтапно: первьй этап подключение радиоэлектронных блоков (указан); второй этап - фиксация подвижных рамок 3 в подключенном положении набором кулачков 10 - 12, взаимное положение профилей которых показано на фиг. 3. Для проведения второго этапа катушка возбуждения муфты 27 обесточивается, ток пропускается через обмотку катушки возбуждения муфты 28, полумуфта (кулачок 11), выполненная так же, как и полумуфта (кулачок 10) из магнитно-мягкого материала, взаимодействует с магнитным потоком муф ты 28 и сцепляется с ведущей полумуфтой 30. На этом этапе из всего набора кулачков первым начинает вращаться кулачок 11, а соседний с ним кулачок 12 остается неподвижным до тех i . пор, пока опорная поверхность 15 кулачка 11 не удаляется от опорной поверхности 18 выступа 17, а поверхности 16 и 19 не входят в зацепление (фиг. 3), причем в этот момент точкиа максимальных радиусов на рабочих профилях расположены в одной плоскости I-I . Затем начинается синхронное вращение кулачка 11 и соседнего с ним кулачка 12, а также аналогичное поочередное смещение
выступов 17 в дугообразных пазах 14 на остальных кулачках до тех пор, пока точки а максимальных радиусов кулачков всего набора не размещаются в одной плоскости . Устройство позиционирования останавливает набор кулачков в горизонтальном положении плоскости I-I , когда точки а максимальных радиусов кулачков фиксируют рамки 3 в положении подключения.
Собрать все кулачки в единый про-филь на втором этапе можно по другому варианту: катушка возбуждения муфты 28 не подключается, ток по-прежнему проходит через катушку возбуждения муфты 27, но привод осуществляет обратное вращение вала 9 по часовой стрелке (фиг. 1). В этом случае кулачки также собираются в единый профиль Однако такой вариант неприемлем, так как вращение кулачков по часовой стрелке вызывает отключение рамок 3, поскольку планки 22 установлены таким образом, что только при вращении кулачков против часовой стрелки левая планка остается в положении контакта с.ограничительным упором 20, а правая выведена из него, что соответствует операции подключения. ТаКИМ. образом, сборка кулачков в единый профиль для фиксации рамок 3 должна производиться с сохранением направления вращения что вызывает необходимость применения дополнительной муфты.
t После проведения контроля электрических параметров проверяемого блока 6 снова начинает вращаться реверсивный привод, сообщающий валу 9 вращение по часовой стрелке (фиг. 1). .Такое вращение соответствует двум видам операций: третий этап - отключение радиоэлектронных блоков; четвертый этап - фиксация подвижных рамок 3 в отключенном положении. При вьтолнении третьего этапа ток пропускается через катушку возбуждения муфты. 28, полумуфта-кулачок 11 сцепляется с ведущей полумуфтой 30 и начинает вращаться. Опорная поверхность 16 кулачка 11 отходит от опорной поверхности 19 выступа 17 неподвижного кулачка 12 до тех пор, пока опорная поверхность 15 не вступает в зацепление с опорной поверхностью 18 и кулачок 12 не начинает вращаться следом за кулачком 11 с запаздывание по углу, равному величине перемещения выступа 17 в дугообразном пазу 14. Аналогично вращается весь набор; кулачки 11-13 начинают поочередно взаимодействовать с правыми планками 22 (фиг, 1), нижний конец которых прижимается к ограничительным упорам 20 и перемещает рамки 3 в направлении отключения. При дальнейшем вращении кулачков левые планки 22 с помощью элементов зацепления выводятся вверх из взаимодействия с ограничительными упорами 20 и не вызывают обратного перемещения рамок 3. После отключения блока 6 выполняется четвертый этап, при котором катушка возбуждения муфты 28 обесточивается, ток подается на катушку возбуждения муфты 27, полумуфта-кулачок 10 сцепляется с ведущей полумуфтой 29. При вра щении кулачка 10 относительно кулачка 12, его выступ 17 перемещается по пазу 14 кулачка 12 до тех пор, пока опорные поверхности 16 и 19 не входят во взаимодействие, после чего начинается синхронное движение кулачка 10 и соседнего с ним кулачка 12 относительно остальных и далее вывод всех кулачков в положение, изображенное на фиг. 3. При дальнейшем повороте набора кулачков по команде с устройства позиционирования, вал 9. останавливается в позиции, когда рамки 3 зафиксированы максимальными радиусами кулачков в положении отключения. Таким образом, набор кулачков имеет два положения. В первом из них все кулачки повернуты друг относительно-друга для организации поочередного подключения (отключения), а во втором - кулачки собраны в единый профиль для фиксации подвижных рамок.
Основным технико-экономическим преимуществом предлагаемого устройства является возможность собрать все кулачки набора в единый профиль и использовать их для фиксации рамок в положениях подключения и отключения, что обеспечивает более надежную работу.
a
/4
/5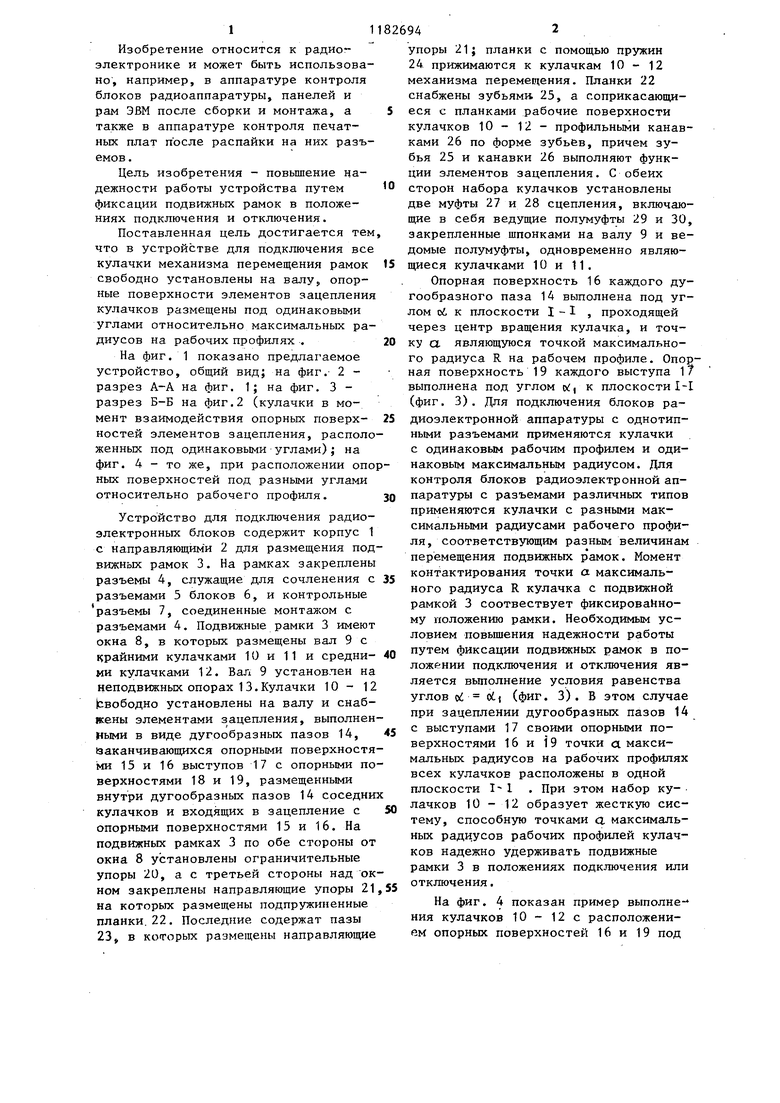
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подключения радиоэлектронных блоков | 1986 |
|
SU1316101A1 |
| Устройство для подключения радиоэлектронных блоков | 1982 |
|
SU1083419A1 |
| Устройство для подключения радиоэлектронных блоков | 1983 |
|
SU1172095A1 |
| Устройство для подключения и закрепления радиоэлектронных блоков | 1980 |
|
SU919169A1 |
| Устройство для подключения радиоэлектронных блоков | 1985 |
|
SU1307612A2 |
| Радиоэлектронный блок | 1988 |
|
SU1598233A1 |
| Машина для прошивки мотков нити | 1975 |
|
SU503955A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Механизм розыска "раза" к ткацкому станку | 1987 |
|
SU1509438A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОДКЛЮЧЕНИЯ УПРАВЛЯЮЩЕГО ТЕРМИНАЛА ДЛЯ ВЫДВИЖНОГО ВОЗДУШНОГО ВЫКЛЮЧАТЕЛЯ И СОДЕРЖАЩИЙ ЕГО ВОЗДУШНЫЙ ВЫКЛЮЧАТЕЛЬ | 2008 |
|
RU2380783C1 |
УСТРОЙСТВО ДЛЯ ПОДКЛЮЧЕНИЯ РАДИОЭЛЕКТРОННЫХ БЛОКОВ, содержащее корпус с направляющими, в которых установлены подвижные рамки с разъемами, ограничительными и направляющими упорами и подпружиненными планками с элементами зацепления в виде зубьев, механизм перемещения подвижных рамок, выполненный в виде реверсивного привода, муфты сцепления, вала, набора размещенных на валу кулачков с элементами зацепления, выполненными на их смежных торцовых поверхностях соответственно в виде дугообразных пазов и выступов с опорными поверхностями, и симметричными канавками на рабочих поверхностях по форме зубьев подпружиненных планок, которые установлены одними своими концами на направляющих упорах с возможностью возвратно-поступательного пеpeмeD eния и поворота относительно них и взаимодействия своими свободными конца. ми с ограничительными упорами,о т л ичающееся тем, что, с целью повьшения надежности в работе путем фиксации подвижных рамок в положениях подключения и отключения, указанный механизм перемещения снабжен I дополнительной муфтой сцепления, набор кулачков расположен между двумя СО муфтами с возможностью поочередного подключения к ним, а крайние кулачс: ки выполнены в виде ведомых полу|4Уфт, причем кулачки механизма пере ещения подвижных рамок свободно установлены на валу, при этом опорные поверхности выступов и опорные кром 00 ки дугообразных пазов каждого кулачto ка расположены под одинаковым углом Од Относительно его оси симметрии. СО 4
| Устройство для подключения и закрепления радиоэлектронных блоков | 1980 |
|
SU919169A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для подключения радиоэлектронных блоков | 1982 |
|
SU1083419A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
