I
Изобретение относится к горной промышленности, в частности к нефтепромысловому оборудованию и пред назначено для спуско-подъема колонны труб на нефтяных скважинах, находящихся под давлением.
Известно устройство, включающее гидроцилиндры де1й подъема и принудительного спуШа колонны, механиз IЫ захвата, объемны, гидропривод .дистанционног| фравления механн мами захватили приводом гидроцилйндров У,дщ I
Однако §,т,р .улфройство характеризуется большими динамическими нагрузками, действующими на грузоподъемный механизм устройства в процессе пуска и торможения цилиндров, кроме этого затрачивается в процессе подъема-спуска колонны значительное время на включение-выключение элементов гидропривода.
Известно также устройство для спуска-подъема труб под давлением, содержащее гидроцилиндры, корпусы и штоки которых связаны между собой соответственно траверсами с захватами для труб, гидросистему привода и управления гидроцилиндрами, включающую гидронасосы, реверсивный распределитель,-И плотный рас-. пределитель, дроссели и клапаны 2}.
В известном устройстве для производительной работы осуществляется быстрое переключение распределителя, а для снижения динамических нагрузок - медленное. Однако переключение .распределителя, влияющего на работу гидросистемы, осуществляется ручным управлением.
Оператор, управляющий устройством, в зависимости от величины нагрузки, действующей на грузоподъемный механизм, производит переключение распределителя с необходимой скоростью: чем меньше нагрузки, тем быстрее производят переключения распределителя и наоборот. Таким образом, большая динамическая составляющая меньшей нагрузки не превышает допустимого нагружения на подъемный механизм и одновременно позволяет экономить время спуска-подъема колонн. Однако такое управление возможно только в идеальном случае. На практике характер управления, будучи ручным, зависит от квалификации оператора.
74554. 2
. Цель изобретения - повьпиение производительности за счет сокращения времени на переключение распределителя и предохранение зле5 ментов гидросистемы от резких перегрузок.
Поставленная цель достигается тем, что в устройстве для спускаподъема труб под давлением, содержащем гидроцилиндры, корпусы и штоки которых связаны между собой соответственно траверсами с захватами для труб, гидросистему привода и управления гидроцилиндрами, включающую гидронасосы, реверсивный распределитель и плотный распределитель, дроссели и клапаны, на выходах камер гидроуправления реверсивного распределителя установлены дроссели осевого типа с подпружиненными золотниками, камеры управления которых связаны соответственно с линией гидроупрйвления и с рабочими полостями гидроцилиндров.
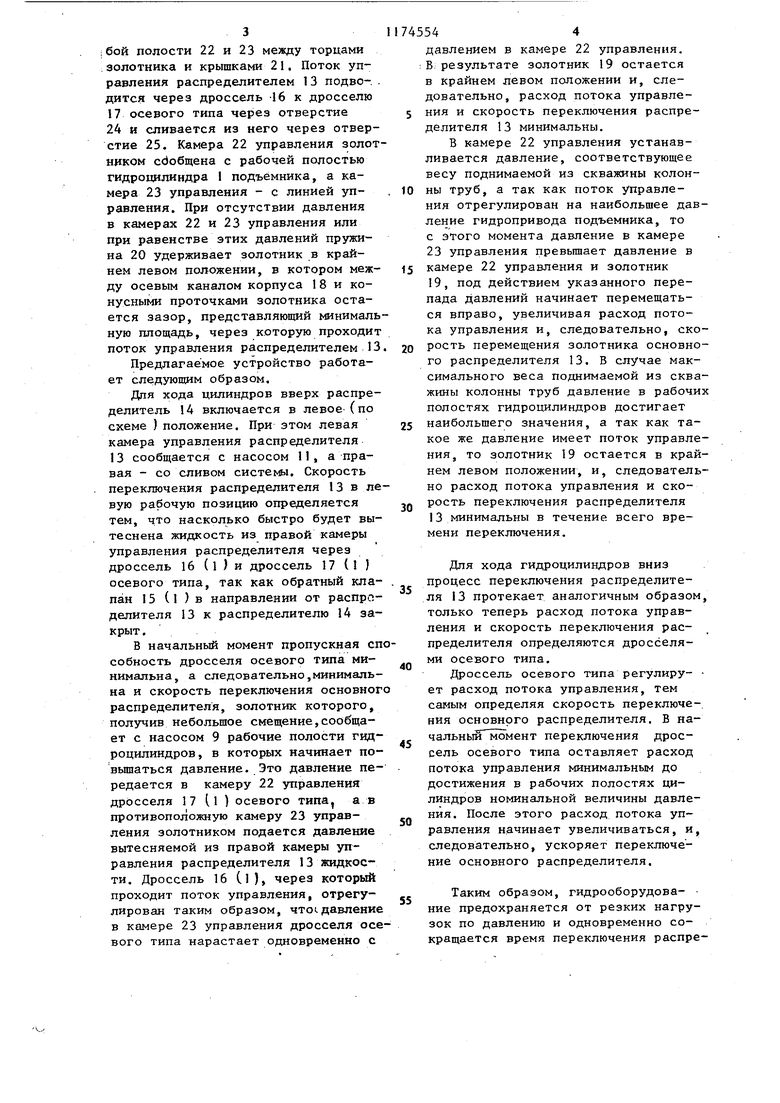
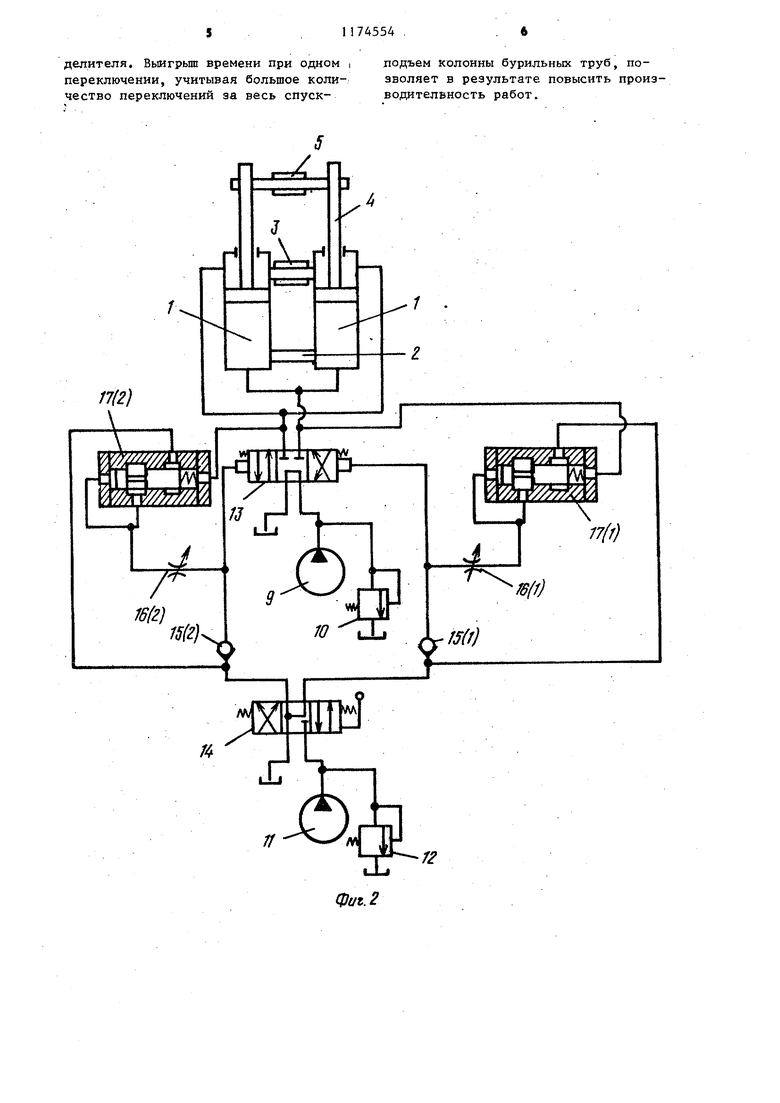
На фиг, 1 приведена конструктивная схема устройства; на фиг. 2 схема гидросистемы привода и управления устройством; на фиг, 3 дроссель осевого типа.
Устройство включает гидроцилиндры 1,корпусы которых соединены нижней 2 и верхней 3 неподвижными траверсами, и штоки 4 - подвижной траверсой 5. На траверсах 3 и 5 установлены соответственно неподвижные 6 и подвижные -7 захваты (спайдеры ) для труб. Устройство установлено на устье скважины, концентрично колонне-труб, переводником 8, соединенным с нижней траверсой 2.
Гидросистема привода и управления устройством включает насос 9, предохраняемый клапаном 10, насос 11 системы управления с клапаном 12, трехпозиционный реверсивный распределитель 13 с гидроуправлением, плотный распределитель 14 (трехпозиционный реверсивный распределитель ), а также установленные на линии управления распределителем 13 обратные клапаны 15, регулируемые дроссели 16 и дроссели 17 осевого типа.
Дроссель осевого типа I7 состоит из корпуса 18, в oceisoM канале которого размещены золотник 19, пружина 20 и крышки 2I. Камеры управления золотником 19 прунлтавляют со- .
3
;бой ПОЛОСТИ 22 и 23 между торцами золотника и крышками 21. Поток управления распределителем 13 подводится через дроссель -16 к дросселю 17 осевого типа через отверстие 24 и сливается из него через отверстие 25. Камера 22 управления золотником сдобщена с рабочей полостью гидро1щлиндра 1 подъёмника, а камера 23 управления - с линией управления. При отсутствии давления в камерах 22 и 23 управления или при равенстве этих давлений пружина 20 удерживает золотник в крайнем левом положении, в котором между осевым каналом корпуса 18 и конусными проточками золотника остается зазор, представляющий минимальную площадь, через которую проходит поток управления распределителем 13
Предлагаемое устройство работает следзпощим образом.
Для хода цилиндров вверх распределитель 14 включается в левое (по схеме ) положение. При этом левая камера управления распределителя 13 сообщается с насосом 11, а правая - со сливом системы. Скорость переключения распределителя 13 в левую рабочую позицию определяется тем, что насколько быстро будет вытеснена жидкость из правой камеры управления распределителя через дроссель 16 (l ) и дроссель 17 (1 J осевого типа, так как обратный клапан 15 (1 ) в направлении от распределителя 13 к распределителю 14 закрыт.
В начальный момент пропускная спсобность дросселя осевого типа минимальна, а следовательно,минимальна и скорость переключения основног распределителя, золотник которого, получив небольшое смещение,сообщает с насосом 9 рабочие полости гидроцилиндров , в которых начинает повьшаться давление. Это давление передается в камеру 22 управления дросселя 1 7 (. 1 ) осевого типа, а в противоположную камеру 23 управления золотником подается давление вытесняемой из правой камеры управления распределителя 13 жидкос ти. Дроссель 16 Cl), через который проходит поток управления, отрегулирован таким образом, что(.давление в камере 23 управления дросселя осевого типа нарастает одновременно с
745544
давлением в камере 22 управления. ;В результате золотник 19 остается в крайнем левом положении и, следовательно, расход потока управле5 НИН и скорость переключения распределителя 13 минимальны.
В камере 22 управления устанавливается давление, соответствующее весу поднимаемой из скважины колонны труб, а так как поток управления отрегулирован на наибольшее давление гидропривода подъемника, то с этого момента давление в камере 23 управления превышает давление в
5 камере 22 управления и золотник 19, под действием указанного перепада давлений начинает перемещаться вправо, увеличивая расход потока управления и, следовательно, скорость перемещения золотника основного распределителя 13. В случае максимального веса поднимаемой из скважины колонны труб давление в рабочих полостях гидроцилиндров достигает
5 наибольшего значения, а так как такое же давление имеет поток управления, то золотник 19 остается в крайнем левом положении, и, следовательно расход потока управления и скоQ рость переключения распределителя 13 минимальны в течение всего времени переключения.
Для хода гидроцилиндров вниз процесс переключения распределителя 13 протекает аналогичным образом, только теперь расход потока управления и скорость переключения распределителя определяются дросселями осевого типа.
Дроссель осевого типа регулиру- ет расход потока управления, тем самым определяя скорость переключе-, ния основного распределителя. В начальньшГмомент переключения дроссель осевого типа оставляет расход потока управления минимальным до достижения в рабочих полостях цилиндров номинальной величины давления. После этого расход потока управления начинает увеличиваться, и, следовательно, ускоряет переключение основного распределителя.
Таким образом, гидрооборудование предохраняется от резких нагрузок по давлению и одновременно сокращается время переключения распреS.I 174554 .. 6
делителя. Выигрыш времени при одном i лодъем колонны бурильных труб, попереключеиии, учитывая большое коли- зволяет в результате повысить проиэчество переключений за весь спуск- водителвность работ.
J712)
mm
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска-подъема труб под давлением | 1983 |
|
SU1142616A1 |
| Способ добычи высоковязкой нефти на малых глубинах и устройство для его осуществления | 2020 |
|
RU2754247C1 |
| Устройство для обработки длинномерного материала | 1988 |
|
SU1637910A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| Гидравлическая система комбайна | 1989 |
|
SU1667692A2 |
| Гидросистема управления насоса,регулируемого по давлению | 1984 |
|
SU1298419A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| Гидравлическая система комбайна | 1988 |
|
SU1561879A1 |
| Гидрообъемная трансмиссия транспортного средства | 1980 |
|
SU901083A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
УСТРОЙСТВО ДЛЯ СПУСКАПОДЪЕМА ТРУБ ПОД ДАВЛЕНИЕМ, содержащее гидроцилиндры, корпусы и штоки которых связаны между собой соответственно траверсами с захватами для труб, гидросистему привода и управления гидроцилиндрами, включающую гидронасосы, реверсивный распределитель, и .плотный распределитель, дроссели и клапаны, о тличающееся тем, что, с целью повышения производительности за счет сокращения времени на переключение распределителя и предохранения элементов гидросистемы от резких перегрузок, на выходах камер гидроуправления реверсивного распределителя установлены дроссели осевого типа с подпружиненными золотниками, камеры гидроуправлеся ния которых связаны соответственно с линией гидроуправления и с рабочими полостями гидроцилиндров. й СП сд Jiib
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зайцев Ю.В | |||
| и др | |||
| Освоение и ремонт нефтяных и газовых скважин под давлением | |||
| М., Недра, 1982 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гонок для ткацкого станка | 1923 |
|
SU254A1 |
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
