Для дистанционной передачи угловых перемещений применяют датчики на переменном токе, выполненные по типу индукционного асинхронного двигателя с использованием реакции ротора.
Недостаток известных датчиков состоит в том, что они оказывают значительное воздействие на контролируемый чувствительный элемент.
Предлагаемый датчик свободен от указанного недостатка вследствие того, что чувствительный элемент жестко связан с общей осью двух короткозамкнутых реактивных обмоток. Эти обмотки размещены соответственно в двух одинаковых статорах, обмотки которых создают два вращающихся в противоположные стороны магнитных потока.
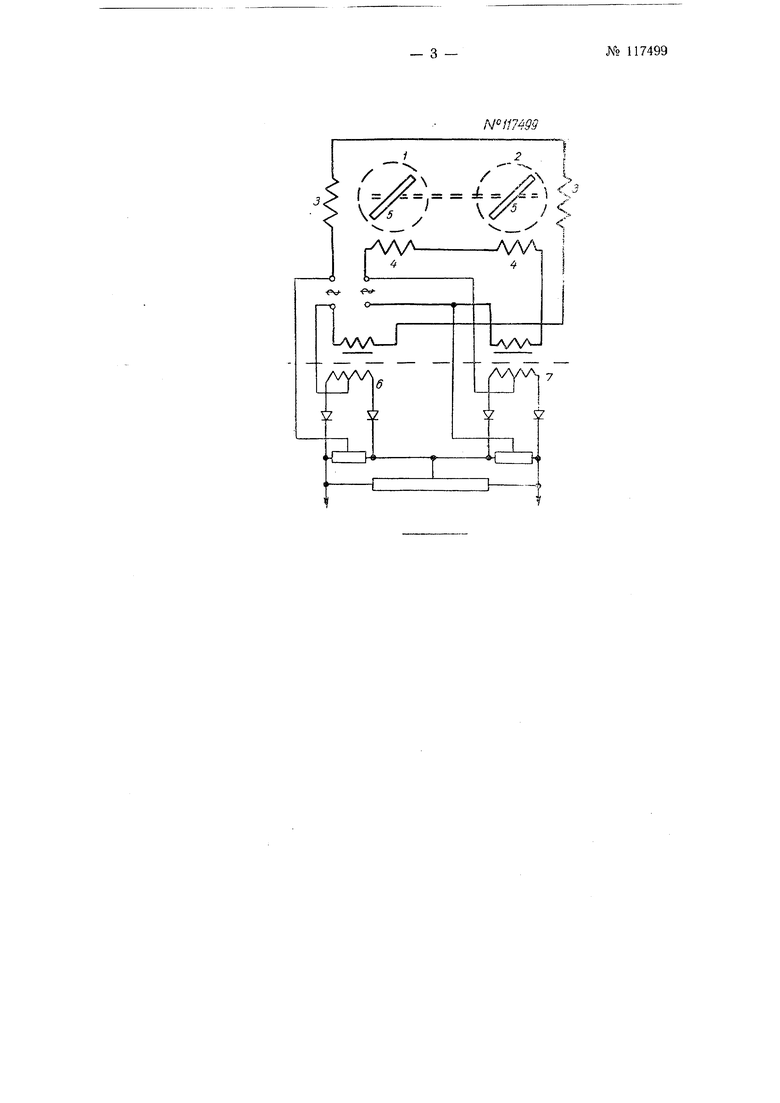
На чертеже изображена электрическая схема предлагаемого датчика.
Датчик содержит два одинаковых статора 1 и 2, имеющих каждый по две обмотки 3 и 4, наподобие статоров индукционных асинхронных двигателей. Обмотки 3 и 4 питаются от двух источников переменного тока с относительным сдвигом фазы в 90°. Для этой цели может быть использован также однофазный источник питания с включением в цепь одной из катущек 3 или 4 емкости, как это делается в конденсаторных двигателях. Внутри каждого из статоров может вращаться плоская рамка, несущая короткозамкнутую обмотку 5. Ось вращения обеих обмоток 5 скреплена с чувствительным элементомПри работе датчика внутри статоров 1 и 2 образуются магнитные поля, которые вращаются в разные стороны. Элементы цепей датчика подобраны таким образом, что если бы внутри статоров не было бы рамок, то амплитудные значения токов во всех обмотках были бы равны. Однако токи, индуктированные в короткозамкнутых обмотках 5, вызывают изменение токов статорных обмоток, величина которых будет зависеть от угла поворота ротора. Дополнительная часть схемы формирует из токов в разных парах обмоток 3 w. 4 разностный сигнал, значение (фаза или знак) которого будет зависеть от угла поворота рамок. В качестве допол№ 117499
нительного устройства могут быть применены фазовые дискриминаторы 6 и 7, подающие выходной сигнал встречно на простейшее суммирующее устройство.
Во время работы датчика каждая из рамок будет испытывать некоторое периодическое воздействие со стороны бегущего поля. Однако поскольку поля вращаются встречно, то суммарный осредненный за период момент, действующий на ось прибора, будет равен нулю и при высокой частоте питающего напряжения практически не будет оказывать воздействия на чувствительный элемент.
При желании частота тока и элементы схемы могут быть подобраны таким образом, чтобы рамки создавали легкую симметричную вибрацию прибора ,что может быть полезным для уменьшения трения в подшипниках.
Предмет изобретения
Датчик угловых перемещений на переменном токе, выполненный по типу индукционного асинхронного двигателя с использованием реакции ротора, отличающийся тем, что, с целью уменьшения воздействия на контролируемый чувствительный элемент, последний жестко связан с общей осью двух размещенных соответственно в двух одинаковых статорах короткозамкнутых реактивных обмоток, создающих два вращающихся в противоположные стороны магнитных потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловых перемещений | 1959 |
|
SU122415A2 |
| СТАТОР ЭЛЕКТРОДВИГАТЕЛЯ | 2020 |
|
RU2723297C1 |
| СТАТОР ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2719685C1 |
| УСТРОЙСТВО КОНТРОЛЯ РОТОРОВ КОРОТКОЗАМКНУТЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2074400C1 |
| АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2088042C1 |
| ТРЕХФАЗНЫЙ АСИНХРОННЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2011 |
|
RU2478249C1 |
| Датчик угловых перемещений | 1957 |
|
SU111232A1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2002 |
|
RU2243572C2 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2392632C1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |