Изобретение относится к области диагностики электромеханического оборудования, применяемого в сельском хозяйстве, нефтедобывающей и нефтеперерабатывающей промышленности, а также других отраслях промышленности, в частности к диагностике асинхронных электрических двигателей с фазным ротором.
Существует изобретение, в котором диагностируется отсутствие межвитковых замыканий ротора по отсутствию в спектре электродвижущей силы гармонических составляющих, четных по отношению к основной гармонике электродвижущей силы. При наличии замыканий путем сравнения относительных величин гармонических составляющих и их частот с каноническим составом магнитного поля ротора данной синхронной машины определяют расположение дефектной катушки (2192649 RU, 10.11.2002). Имеются способы диагностирования погружных центробежных насосов, осуществляемые при пуске, выходе на стационарный режим, в стационарном режиме и при останове посредством одновременной регистрации потребляемого электродвигателем тока, напряжения электропитания, мгновенных значений амплитуд вибрации и величин буферного давления путем сравнения с параметрами, полученными при вводе в эксплуатацию (RU 2206794 С1, 20.06.2003), а также посредством регистрации переменной составляющей суммы фазных токов питания за счет установки датчика напряжения одновременно на три фазы питающего кабеля, анализа формы и амплитуды полученного сигнала сравнением со значениями предыдущих измерений (RU 2213270 С2, 27.09.2003). В способах диагностики на основании анализа спектра частот амплитудной модуляции тока, потребляемого двигателем, и по глубине амплитудной модуляции тока, определяют дефектный агрегат механизма или системы (JP 05-018813, 26.01.93, RU 2269759 С1, 10.02.2006). Существует способ комплексного контроля трехфазной обмотки электрической машины путем подачи на ее обмотки от генератора суперпозиции двух импульсных последовательностей с одинаковыми периодами и противоположными полярностями. В данном способе о наличии дефекта судят по напряжению на выходе фазового детектора (RU 2289143 С2, 10.12.2006). В способе точного обнаружения места виткового замыкания в обмотках якорей коллекторных электрических машин (RU 2308730 С2, 10.06.2007) испытательное напряжение подают поочередно на две коллекторные пластины двух смежных витков обмотки якоря и по резкому уменьшению импульсного магнитного поля несимметрично расположенного индукционного датчика, определяют единственный короткозамкнутый контур, а перемещением датчика по периметру определяют точку виткового замыкания.
Недостатком известных способов диагностики, позволяющих определять дефектный агрегат механизма или системы, является невозможность диагностирования активной части такого дефектного агрегата, как электрический двигатель с фазным ротором.
Наиболее близким к предлагаемому способу диагностики являются способы диагностирования погружных центробежных насосов, осуществляемые при пуске, выходе на стационарный режим, в стационарном режиме и при останове посредством одновременной регистрации потребляемого электродвигателем тока, напряжения электропитания, мгновенных значений амплитуд вибрации и величин буферного давления путем сравнения с параметрами, полученными при вводе в эксплуатацию (RU 2206794 С1, 20.06.2003), а также посредством регистрации переменной составляющей суммы фазных токов питания за счет установки датчика напряжения одновременно на три фазы питающего кабеля, анализа формы и амплитуды полученного сигнала путем сравнения со значениями предыдущих измерений (RU 2213270 С2, 27.09.2003).
Целью изобретения является разработка способа диагностики активной части электрического двигателя. Способ позволяет по измеряемым в процессе диагностики токам, получаемым по цепям питания обмоток статора и ротора, производить анализ состояния электрического двигателя.
Поставленная цель достигается тем, что в отличие от предложенных ранее способов диагностики используется сравнение измеренных по цепям питания токов электрических двигателей ЭМС с эталонными токами, являющимися элементами матрицы Грина. Большое число контролируемых параметров обеспечивает большую надежность обнаружения неисправностей активной части двигателя.
Указанная задача решается следующим образом [Курилин С.П., Денисов В.Н., Круглов В.В. Матричная теория электрических машин. М.: АНО ВПО ЦС РФ «Российский университет кооперации», 2008. - 128 с.: ил. ISBN 978-5-94771-102-8]:
1. По электрическому входу фиксируется вектор тока машины
компонентами которого являются токи статора и ротора.
2. Проводится достаточно быстрый диагностический эксперимент, такой, что за его время сигналы по другим входам не успеют существенно измениться. В частности, частота вращения ротора поддерживается равной нулю ω=0.
В этих условиях моделью для описания электрической машины может служить система дифференциальных уравнений

где  и А - вектор напряжений и соответствующая параметрическая матрица. Начальное значение вектора тока дается вектором
и А - вектор напряжений и соответствующая параметрическая матрица. Начальное значение вектора тока дается вектором  .
.
Применив преобразование Лапласа к выражению (2), получаем в операторной форме записи

где р,  ,
,  - изображения по Лапласу оператора дифференцирования, вектора тока и вектора напряжений
- изображения по Лапласу оператора дифференцирования, вектора тока и вектора напряжений  .
.
Из (3) находим изображение вектора тока

где Е - единичная матрица.
Теория интегральных преобразований утверждает: если изображение решения есть произведение элементарных изображений, то оригинал решения есть свертка элементарных оригиналов.
Оригинал одного из сомножителей правой части (4)
очевиден. Это векторная функция
 ,
,
где δ(t) - функция Дирака или дельта-функция. Осталось выяснить, каков оригинал первого сомножителя правой части (4)
(рЕ-А)-1.
Если при нулевых начальных условиях воздействовать дельта-функцией на одну из фаз электрического входа, то вектор отклика машины  можно, согласно (2), найти из уравнения
можно, согласно (2), найти из уравнения
 ,
,
где  - единичный вектор, у которого все координаты равны нулю, за исключением единицы, стоящей на месте с индексом k. Воздействия по каждой из фаз и отклики машины связаны матричным уравнением
- единичный вектор, у которого все координаты равны нулю, за исключением единицы, стоящей на месте с индексом k. Воздействия по каждой из фаз и отклики машины связаны матричным уравнением

Здесь принято, что элементы матрицы Грина
 , m=1, …, n, k=1, …, n
, m=1, …, n, k=1, …, n
представляют собой отклики машины по фазе с индексом m на импульсное воздействие по фазе с индексом k.
Применив преобразования Лапласа к выражению (5) и решив полученную систему уравнений относительно изображения матрицы Грина
G(p)=(pE-A)-1,
приходим к выводу о том, что оригиналом первого сомножителя правой части выражения (5) является матрица Грина
Таким образом, при произвольном характере питающих машину напряжений, ее отклик дается вектором тока

а в случае воздействия на обесточенную машину

В выражениях (7), (8) символом «*» обозначена свертка функций, то есть интеграл вида
В частности, если подается импульсное напряжение  только по цепи питания с индексом k, то соответствующий вектор тока двигателя
только по цепи питания с индексом k, то соответствующий вектор тока двигателя  представляет собой k-тый столбец матрицы Грина.
представляет собой k-тый столбец матрицы Грина.
То есть, если 
 .
.
Матрица Грина по (6) является функциональной матрицей собственных и взаимных проводимостей фаз асинхронного двигателя, выраженных в относительных единицах. Она несет информацию не только о величине этих проводимостей и их симметрии, но и о том, как эти проводимости изменяются с течением времени.
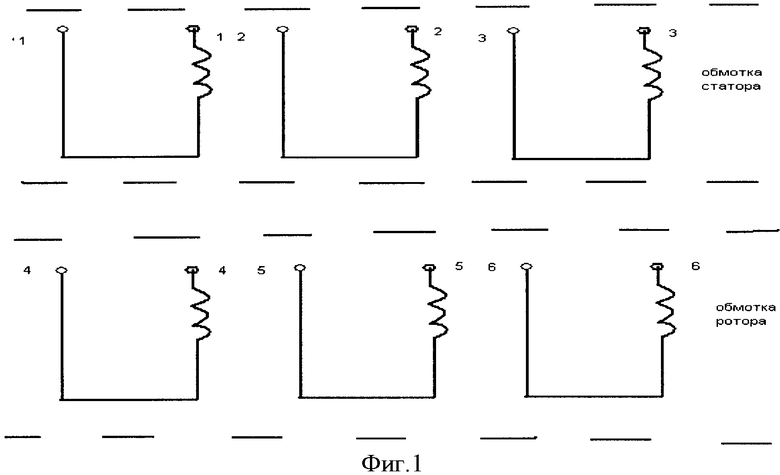
Процесс диагностики производится путем последовательной подачи импульсных напряжений в виде функции Хевисайда на фазы статора и ротора асинхронного двигателя при неподвижном роторе и измерении возникающих при этом токов фаз. На фиг.1 представлены фазы статора и ротора двигателя. В различных комбинациях (см. таблицу) на одну из фаз подается питание и производится измерение тока во всех фазах статора и ротора.
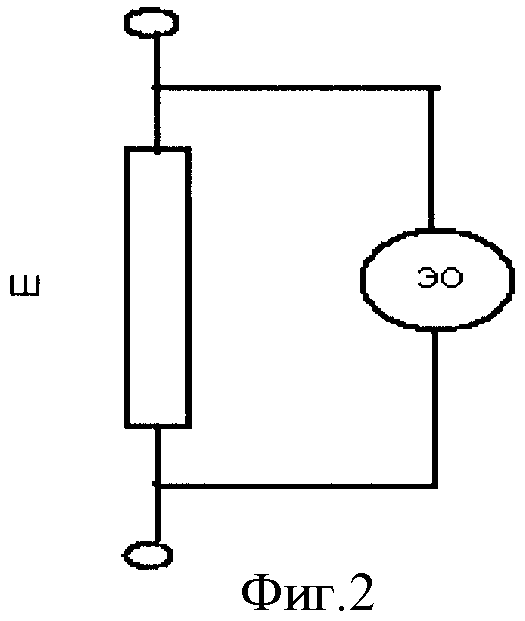
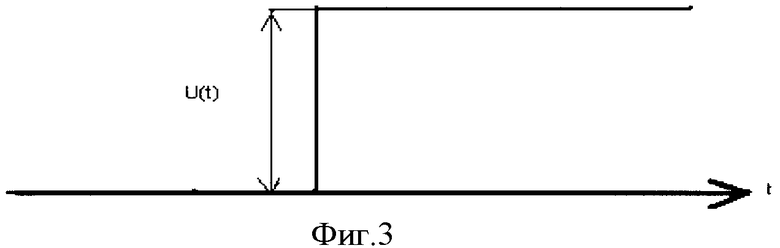
На фиг.2 представлен измерительный блок, состоящий из резистивного элемента (шунта) Ш и электронного осциллографа ЭО. Измерительный блок включается последовательно в цепь той же фазы, в которой производится измерение тока. Если производится измерение интегрального элемента матрицы Грина  , то питание подается на фазу с номером k, а измерительный блок включается в фазу с номером m. Питающее напряжение по фиг.3 задается ступенчатой импульсной функцией в виде функции Хевисайда с амплитудой U=10-15 В.
, то питание подается на фазу с номером k, а измерительный блок включается в фазу с номером m. Питающее напряжение по фиг.3 задается ступенчатой импульсной функцией в виде функции Хевисайда с амплитудой U=10-15 В.
Измерения токов фаз производятся при неподвижном роторе. Взаимное расположение статора и ротора может быть любым, но должно сохраняться неизменным в течение всей серии опытов.
Получение элементов интегральной матрицы Грина производится следующим образом:
1) измерительные блоки включаются во все фазы;
2) фазы с номерами 2-6 замыкаются накоротко;
3) импульс по фиг.3 подается на фазу с номером 1. При этом измеряются напряжения на шунтах измерительных блоков 
4) далее опыт повторяется с круговым изменением номеров фаз включения измерительного блока (внутренний цикл) и номеров фаз, питающихся от источника (внешний цикл), как отражено в таблице.
Согласно таблице для определения интегральной матрицы Грина проводится 36 опытов.
Элементы измеренной интегральной матрицы Грина сравниваются с элементами эталонной матрицы. Эталонная матрица снимается аналогичным способом с электродвигателя, исправность которого не вызывает сомнений. Путем сравнения элементов интегральной матрицы Грина тестируемой и эталонной электрической машины определяют дефектный элемент ее структуры.
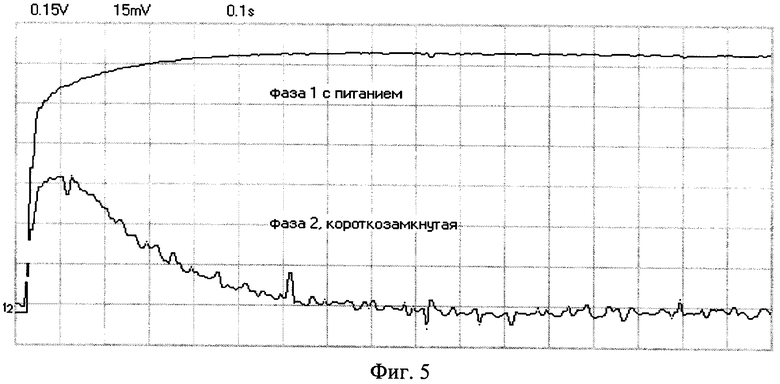
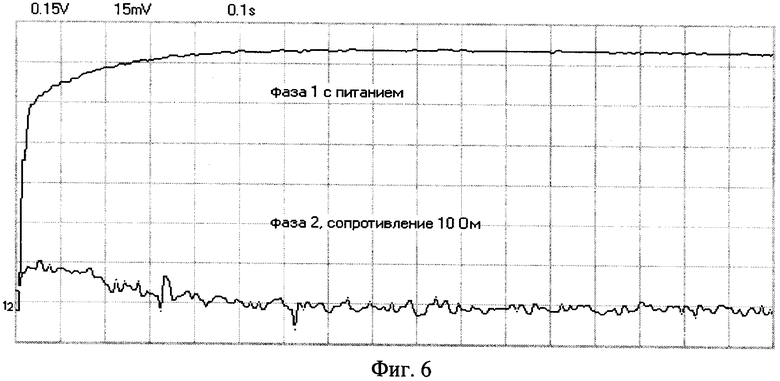
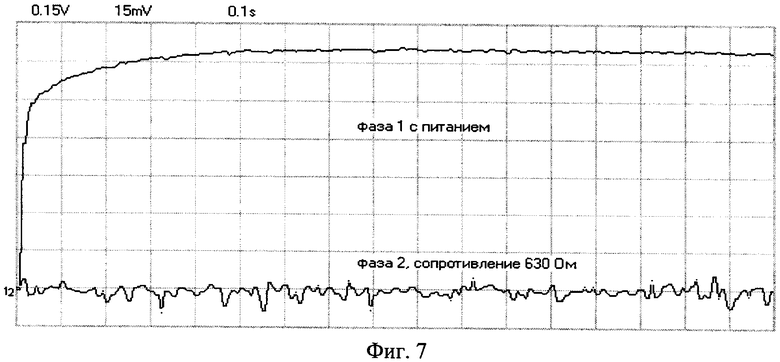
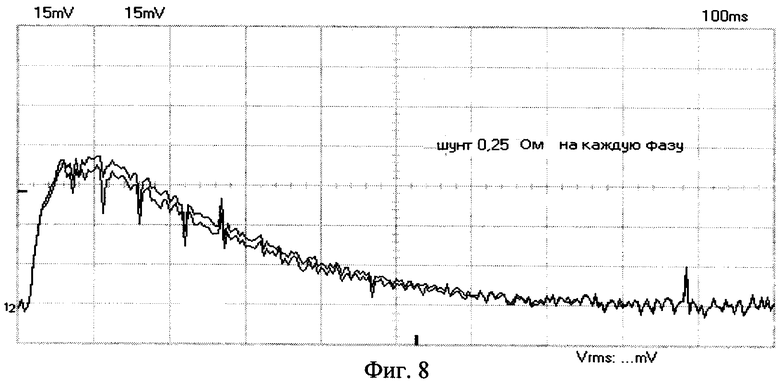
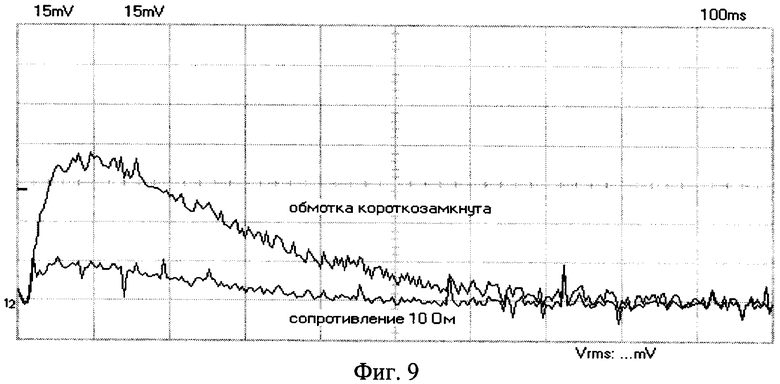
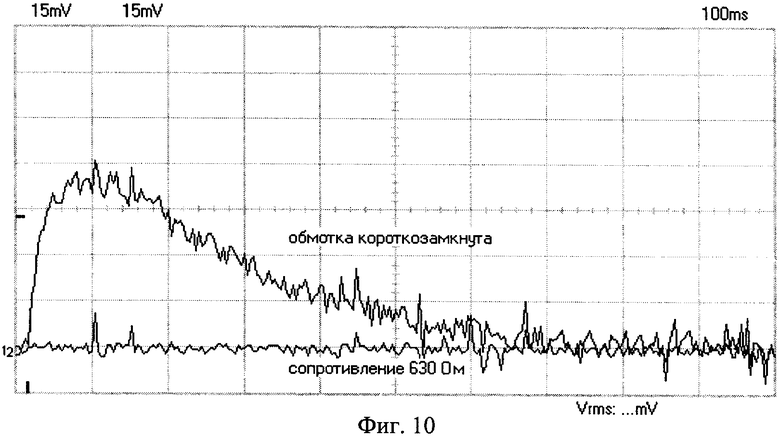
Ниже приводятся экспериментальные данные, относящиеся к исправному асинхронному двигателю и двигателю с поврежденной фазой. На фазу 1 статора эталонного асинхронного двигателя с активным сопротивлением 3 Ом подавалось постоянное напряжение амплитудой 12 В в виде функции Хевисайда. За это же самое время с обмоток статора 1, 2, 3, 4, 5, 6 (фиг.4) одновременно снимались показания цифровым запоминающим осциллографом PCS500, при одинаковых номиналах шунтов (Ш) 0,25 Ом. Имитация повреждения обмотки проводилась включением дополнительного сопротивления в цепь фазы 2 статора (фиг.4). Номинал подключаемого сопротивления варьировался: R1=10 Ом, R2=630 Ом. Ток фазы внешнего цикла с течением времени выходит на постоянный уровень, ток фазы внутреннего цикла затухает до нуля, если обмотка не повреждена (фиг.5), повреждение незначительно (фиг.6) или практически, с точностью до уровня шумов (фиг.7), равен нулю для фазы с разрывом. Если в исследуемых фазах статора не было повреждений, то интегральная матрица Грина симметрична и токи фаз внутреннего цикла совпадают, затухая до нуля (фиг.8). Графики токов интегральной матрицы Грина приведены для неповрежденных обмоток на фигуре 8 и обмоток с имитацией повреждения на фигурах 9, 10 соответственно. В фазе с измененными характеристиками наблюдается резкое уменьшение амплитудного значения тока по сравнению с эталонной характеристикой. В фазе с эталонными параметрами изменение тока также имеется, но отличие тока от эталонного тока незначительно.
Представляется весьма важным, что подобную диагностику можно производить без демонтажа и разборки АД, а также без отсоединения технологического оборудования.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностирования технического состояния асинхронных электрических двигателей и устройство для его осуществления | 2022 |
|
RU2794240C1 |
| Способ определения показателей технического качества магнитопровода индуктора трёхфазного линейного асинхронного электродвигателя | 2023 |
|
RU2803039C1 |
| Способ диагностирования технического состояния электрических двигателей по анализу сигналов тока | 2024 |
|
RU2829015C1 |
| Способ диагностирования технического состояния электрических двигателей в режиме реального времени | 2024 |
|
RU2826152C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2763849C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| Ротор асинхронного электродвигателя | 2016 |
|
RU2617445C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| Способ определения показателей технического качества магнитопровода индуктора линейного асинхронного электродвигателя | 2023 |
|
RU2815000C1 |
Изобретение относится к области диагностики асинхронных электрических двигателей с фазным ротором. Сущность: при неподвижном роторе на фазы статора и ротора последовательно подают импульсные напряжения в виде функции Хевисайда при остальных короткозамкнутых фазах. Измеряют возникающие при подаче напряжения токи всех фаз, являющиеся элементами интегральной матрицы Грина. Сравнивают соответствующие элементы интегральной матрицы Грина тестируемого электрического двигателя с соответствующими элементами эталонной интегральной матрицы Грина. По величине отклонения в соответствующих элементах этих матриц судят о наличии дефекта в структуре активной части электрического двигателя. Технический результат: повышение надежности обнаружения неисправности. 10 ил., 1 табл.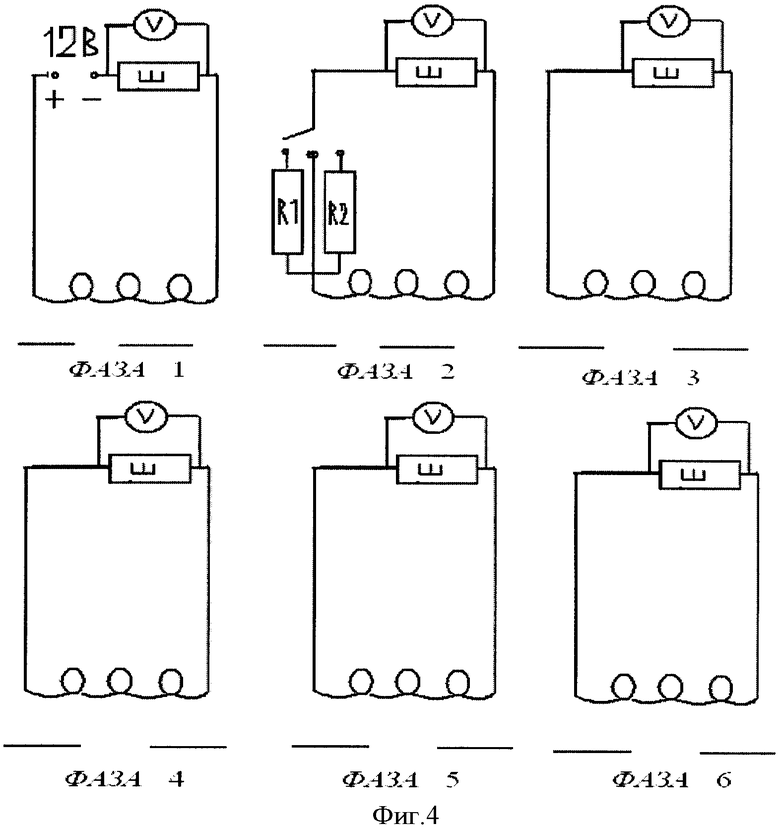
Способ диагностики электрических двигателей с фазным ротором, основанный на измерении токов статора и ротора электрического двигателя, возникающих от напряжений, приложенных по цепям питания, отличающийся тем, что при неподвижном роторе на фазы статора и ротора последовательно подают импульсные напряжения в виде функции Хевисайда при остальных короткозамкнутых фазах и измеряют возникающие при подаче напряжения токи всех фаз, являющиеся элементами интегральной матрицы Грина, сравнивают соответствующие элементы интегральной матрицы Грина тестируемого электрического двигателя с соответствующими элементами эталонной интегральной матрицы Грина, по величине отклонения в соответствующих элементах этих матриц судят о наличии дефекта в структуре активной части электрического двигателя.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПОГРУЖНЫХ УСТАНОВОК ДЛЯ ДОБЫЧИ НЕФТИ | 2001 |
|
RU2213270C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН | 2004 |
|
RU2274869C2 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2007 |
|
RU2339049C1 |
| JP 2007292761 А, 08.11.2007. | |||

