1
Изобретение относится к автоматике и вычислительной технике и может быть использовано для совершенствования качества контроля преобразователей угловых перемещений вала в код.
Цель изобретения - .повьшение точности устройства контроля преобразователя угловых перемещений вала в код.
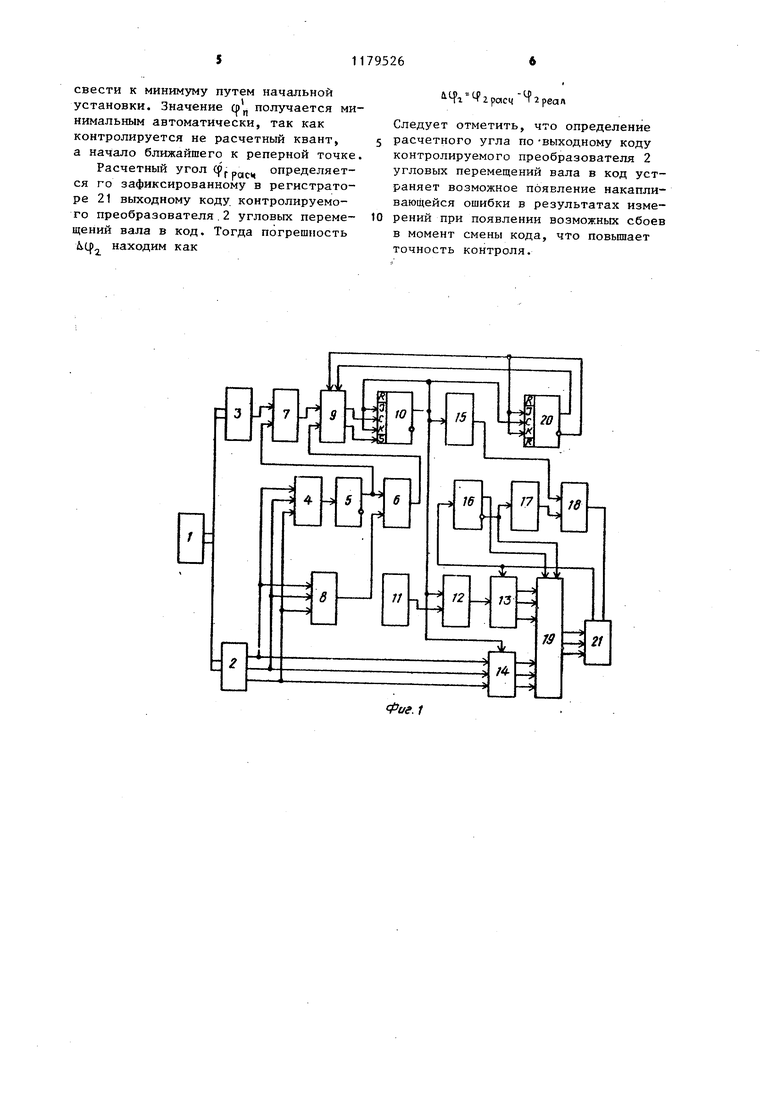
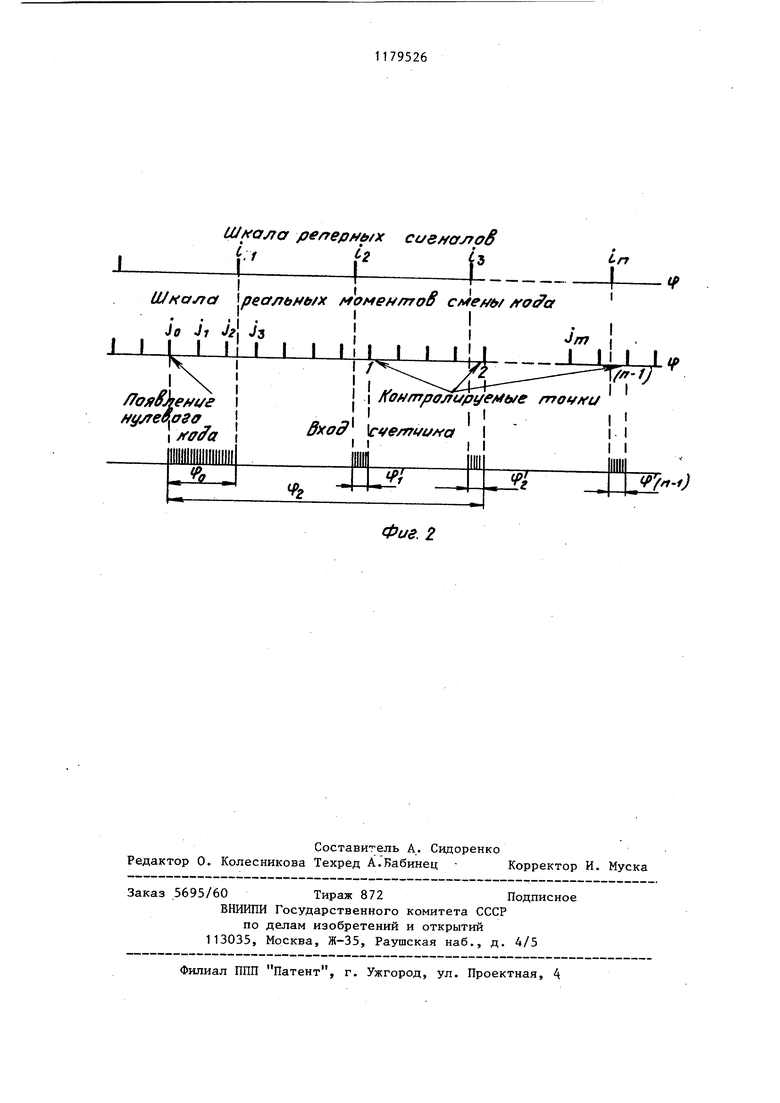
На фиг. 1 приведена схема устройства контроля преобразователя угловых перемещений вала в код; на фиг. 2 - диаграммы сигналов, поясняющие работу устройства.
Устройство контроля преобразователя угловых перемещений вала в код содержит привод 1, контролируемьй преобразователь 2 угловых перемещений вала в код, электромеханическую шкалу 3, дешифратор 4 нулевого кода, триггер 5, элемент И 6, элемент И 7, блок 8 реальных сигналов, распределитель 9, триггер 10, генератор 11, элемент И 12, счетчик 13, регистр 14, одновибратор 15, тригге 16, одновибратор 17, элемент ИЛИ 18 мультиплексор 19, триггер 20, регистратор 21.
Устройство контроля.преобразователя угловых перемещений вала в код работает следующим образом.
Перед началом измерений все триггеры 5, 10, 16, 20 в устройстве устанавливаются в нулевое состояние. Включают привод 1, который вращает закрепленные на одном валу ротор контролируемого преобразователя 2 угловых перемещений вала в код и ротор электромеханической шкалы 3.
При вращении электромеханическая шкала 3 формирует на выходе последовательность равномерно распределенных по угловой оси с точностью в единицу секунд реперных сигналов
i, где п - информацион1 1-2
ная емкость электромеханической шкалы 3, например порядка восьми-девяти двоичных разрядов (фиг. 2). Блок 8 реальных сигналов формирует nocjj eдовательность сигналов j, j,, j ... j , где m - информационная емкость контролируемого преобразователя 2 угловых перемещений вала в код, которая больше информационной емкости электромеханической шкалы 3. Сигналы появляются каждый раз, когда происходит смена кода на выходе конт795262
ролируемого преобразователя 2 угловых перемещений вала в код, причем j соответствует появлению нулевого кванта, j -первого кванта и т.д. 5 В качестве блока 8 реальных сигналов может быть использован, например, формирователь импульсов по фронту и срезу входного сигнала. До появления нулевого кода на выходе контролируемого преобразователя 2 угловых перемещений- вала в код ключи на элементах И 6 и И 7 закрыты низким потенциалом на выходе триггера 5. Поэтому сигналы с выходов блока 8 реальных сигналов и электромеханической шкалы 3 в схему не поступают.
Момент появления нулевого кода на выходе контролируемого преобразователя 2 угловых перемещений вала в код выделяется дешифратором 4 нулевого кода. Это приводит к установлению в единичное состояние триггера 5. Высокий потенциал на выходе
триггера 5 подготавливает элементы И6 и И7 для прохождения через них сигналoBv Сигнал нулевого кода, длительность которого больше времени задержки распространения в дешифраторе 4 нулевого кода и триггере 5, через элемент И6 поступает на второй информационный вход распределителя 9. Распределитель 9 собран на элементах И-РШИ, при нулевом состоянии триггера 20 сигналы с первого информационного входа попадают на первый выход, а с второго информационного входа на второй выход. Поэтому- сигнал нулевого кода с второго информационного входа распределителя 9 поступает на S-вход триггера 10, опрокидывая его в единичное
состояние. I
Высокий потенциал с выхода триггера 10 поступает на его tl-и К-входы,-на вход элемента И 12. Импульсы с генератора 11 через элемент И 12 поступают на счетный вход счетчика 13, который подсчитывает их число. Счет продолжается до появления первого реперного сигнала с момента появления сигнала на входе элемента И7. Реперный сигнал с выхода электромеханической шкалы 3 через элемент И7 поступает на первый вход распределителя 9 и с его выхода на синхровход триггера 10, опрокидывая его в нулевое состояние. По переходу 1/О на выходе триггера 10 происходит запись выходного кода контролируемого преобразователя 2 угловых перемещений вала в код в регистр 14, запускается одновибратор 15, по выходному импульсу которого начинается передача содержимого счетчика 13 и регистра 14 через мультиплексор 19 в регистратор 21. Триггер 20 устанавливается в единичное состояние, которое за счет соединения его инверсного выхода с его J- и К-входами сохраняется до конца измерений. Новое состояние триггера 20 изменяет направление свя зей в распределителе 9. Сигналы с его первого входа теперь проходят на второй выход, а с второго информационного входа на первый выход. Исходное нулевое состояние триггера 16 обеспечивает передачу содержимого счетчика 13 через мультиплексор 19 на его выход. Выходной импульс одновибратора 15, через элемент ИЛИ 18 поступает на синхровход регистратора 21. По этому сигналу в регистраторе фиксируется содержимое его информационны входов. По окончании записи информа ции в регистраторе 21 на его синхро выходе появляется сигнал, который обнуляет счетчик 13, а триггер 16 опрокидывает в единичное состояние. Это состояние триггера 16 обеспечивает передачу содержимого регистра 14 через мультиплексор 19 на информационные входы регистратора 21. По переходу 1/0 триггера 16 на его инверсном выходе запускается одновибратор 17, выходной импульс которого через элемент ИЛИ 18 поступает на синхровход регистратора 21, где фик сируется содержимое регистра 14. По окончании записи информации в регис раторе 21 на его синхровыходе появляется сигнал, который опрокидывает триггер 16 в нулевое состояние Формирование импульса одновибратором 17 при этом не. происходит, так как на инверсном выходе трипера 16 происходит переход 0/1. Таким образом, в результате первого измерения в регистраторе 21 фиксируется код, пропорциональный угловому сдви гу cfo между нулевым положением вала контролируемого преобразователя 2 угловых перемещений вала в код и ближайшим последующим реперным сигналом электромеханической шкалы 3 (фиг. 2), а также выходной код контролируемого преобразователя 2 угловых перемещений вала в код в момент появления реперного сигнала. Так как направление связей в распределителе 9 изменилось, то в дальнейшем каждый реперный сигнал электромеханической шкалы 3 будет устанавливать триггер 10 в единичное состояние, а ближайший последующий момент смены кода контролируемого преобразователя 2 угловых перемещений вала в код опрокидывать триггер 10 в нулевое состояние. Это обеспечит передачу в регистратор 21 аналогичным образом кода, пропорциональ,ного угловому сдвигу между каждым реперным сигналом электромеханической шкалы 3 и ближайшим моментом смены кода контролируемого преобразователя 2 угловых перемещений вала в код, а также его выходного кода, который устанавливается после этой смены кода. Измерения заканчиваются после одного оборота ротора контролируемого преобразователя 2 угловых перемещений вала в код, когда повторное появление нулевого кода на его выходе выделяется дешифратором 4 нулевого кода, что опрокидывает триггер 5 в нулевое состояние, и элементы И6 и И7 закрываются для прохождения сигналов. Полученные в регистраторе 21 данные являются базовыми для определения погрешности контролируемого преобразователя 2 угловых перемещений вала в код. Например, для точки 2 (фиг. 2) реальный угол tfj реал, определяют как 2реаА-Яо е(ы)1су.,, где J - длина кванта электромеханической шкалы 2; k - порядковый номер реперного сигнала,с момента появления нулевого кода контролируемого преобразователя 2 угловых перемещений вала в код до измеряемой точки (совпадают с порядковым номером пары чисел в регистраторе 21), для данной точки . Отсюда следует, что точность определения реального угла определяется длительностью и tfn- Угол Ср можно
свести к минимуму путем начальной установки. Значение ср получается минимальным автоматически, так как контролируется не расчетный квант, а нач:ало ближайшего к реперной точке Расчетный угол Срграсч определяется го зафиксированному в регистраторе 21 выходному коду, контролируемого преобразователя.2 угловых перемещений вала в код. Тогда погрешность ACf находим как
Чг-Чгро,сч 2реап
Следует отметить, что определение расчетного угла по -выходному коду контролируемого преобразователя 2 угловых перемещений вала в код устраняет возможное появление накапливающейся ошибки в результатах измерений при появлении возможных сбоев в момент смены кода, что повьш1ает точность контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля преобразователей угла поворота вала в код | 1983 |
|
SU1126995A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1981 |
|
SU970429A1 |
| Устройство для ввода информации | 1982 |
|
SU1048465A1 |
| Устройство для измерения погрешностей фазовращателя | 1984 |
|
SU1203700A1 |
| Коррелятор | 1983 |
|
SU1130874A1 |
| Устройство для контроля параметра объекта | 1991 |
|
SU1833841A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2109399C1 |
| Многоканальная система для анализа формы и регистрации аналоговых процессов | 1983 |
|
SU1149242A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090839C1 |
| Устройство для контроля параметров объектов | 1989 |
|
SU1695270A1 |
УСТРОЙСТВО КОНТРОЛЯ ПРЕОБРАЗОВАТЕЛЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ВАЛА В КОД, содержащее привод, кинематически соединенный с электромеханической шкалой и контролируемым преобразователем угловых перемещений вала в код, выходы которого соединены с входами блока реальных сигналов и дешифратора нулевого кода, выход которого соединен через первый триггер с первым входом первого элемента И, второй вход которого соединен с выходом блока реальных сигналов, выход второго триггера соединен с первым входом второ.го элемента И, второй вход которого соединен с выходом генератора, а выход соединен со счетным входом счетчика, третий триггер, элемент ИЛИ, третий элемент И, регистр, регистратор, отличаю. щ е е с я тем, что, с целью повышения точности устройства, в него введены распределитель, первый и вто-. рой одновибраторы, четвертый триггер и мультиплексор, выходы контролируе/- cL. мого преобразователя угловых перемещений вала в код соединены с информационнььми входами регистра, выходы которого соединены с первой группой входов мультиплексора, выход электромеханической шкалы соединен с первым входом третьего элемента И, второй вход которого соединен с выходом первого триггера, а выход соединен с первым входом распределителя, второй вход которого соединен с выходом первого элемента И, первый выход соединен с С-входом .второго триггера, второй выход соединен с S-входом второго триггера, выход которого соединен со с J- и К-входами второго триггера, (Л с С-входом третьего триггера, управляющим входом регистра и входом первого одновибратора, выход которого соединен с первым входом элемента ИЖ, первый выход третьего триггера соединен с первым управляющим входом распределителя, а второй выход - с вторым управляющим входом распреде лителя, J- и К-входами третьего тригgD ел гера, выходы счетчика соединены с второй группой входов мультиплексора, выходы которого соединены с инts9 формационными входами регистратора, С9д выход которого соединен с синхровходами счетчика и входами четвертого триггера, выходы которого соединены с управляющими входами мультиплексора, один из выходов четвертого триггера соединен через второй одновибратор с вторым входом элемента ИЛИ, выход которого соединен с управляющим входом регистратора.
Фи$. 2
| Устройство для контроля преобразователей угла поворота вала в код | 1981 |
|
SU970429A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1983 |
|
SU1126995A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
