четвертого элемента задержки, вторым входом четвертого элемента ИЛИ первым входом пятого элемента ИЛИ, третий выход первого логического бло ка - с входом пятого элемента задерж ки и вторыми входами шестого и восьмого элементов ИЛИ, четвертый выход первого логического блока - с входом шестого элемента задержки, вторым входом седьмого элемента ИЛИ и первы входом восьмого элемента ИЛИ, выход которого подключен к первому входу первого элемента ИЛИ, второй вход ко торого связан с третьим выходом коммутатора, а выход через йервый элемент задержки - с первыми входами третьего и пятого элементов И, нулевыми входами первого и третьего триггеров, выход третьего элемента ИЛИ связан с суммирующим входом первого реверсивного счетчика, вычитающий вход которого соединен с выходом четвертого элемента ИЛИ, выход пятого элемента ИЛИ через второй элемент задержки связан с первыми входами четвертого и шестого элементов И, нулевыми входами второго и четвертого триггеров, единичные входы первого, второго, третьего и четвертого триггеров подключены к выходам соответственно третьего, четвертого, пятого и шестого элементов И, единичные выходы первого, второ47го, третьего и четвертого триггеров соединены соответственно с первым и вторым входа и седьмого элемента И, первым и вторым входами восьмого элемента И, выходы седьмого и восьмого элементов И связаны соответственно с первьм и вторым входами второго элементов ИЛИ, выход которого соединен с первыми входами девятого, десятого, одиннадцатого и двенадцатого элементов И, а также через элемент НЕ - с вторыми входами первого и второго элементов И, выходы которых связаны соответственно с первьпу и вторым входами коммутатора, а первые входы - соответственно с вторыми входами третьего и четвертого элементов И, первым выходом Порогового блока и вторыми входами пятого и шестого элементов И, вторым выходом порогового блока, выходы третьего, четвертого, пятого и шестого элементов задержки связаны с первыми входами соответственно третьего, четвертого, шестого и седьмого элементов ИЛИ через соответственно девятый, десятый, одиннадцатый и двенадцатый элементы И, выходы шестого и седьмого элементов ИЛИ подключены соответственно к вычитающему и суммирующему входам второго реверЬивного счетчикл .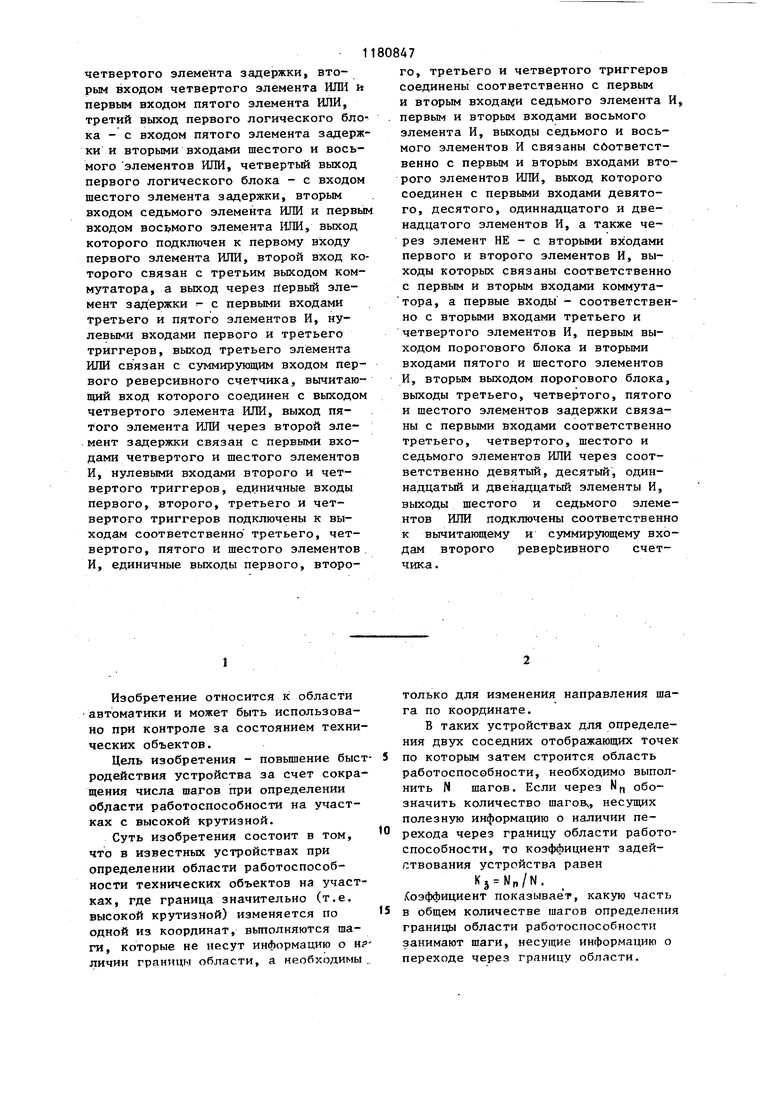
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения области устойчивой работы технических объектов | 1984 |
|
SU1241197A1 |
| Устройство для определения границы области работоспособности технических объектов | 1980 |
|
SU954948A1 |
| Многоканальный автоматический оптимизатор | 1980 |
|
SU949634A1 |
| Устройство для определения границы области работоспособности технических объектов | 1980 |
|
SU943650A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ НАРАБОТКИ НА ПОЛНЫЙ ОТКАЗ СТРУКТУРНО-СЛОЖНОЙ СИСТЕМЫ | 1992 |
|
RU2041493C1 |
| Цифровой многомерный оптимизатор | 1989 |
|
SU1689919A1 |
| Устройство для формирования видеосигнала | 1990 |
|
SU1741124A1 |
| Устройство для контроля области работоспособности электронных блоков | 1984 |
|
SU1228056A1 |
| Устройство для отображения символов на экране электронно-лучевой трубки | 1991 |
|
SU1800475A1 |
| Устройство для формирования изображения | 1987 |
|
SU1462289A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГРАНИЦЫ ОБЛАСТИ РАБОТОСПОСОБНОСТИ ТЕХНИЧЕСКИХ ОБЪЕКТОВ, содержащее первый реверсивный счетчик, выход которого соединен с первым входом блока индикации и первыми информационными входами блока совпадения и двухканального блока сравнения, выход второго реверсивного счетчика связан с вторым входом блока ин-. дикации, вторыми информационными входами блока совпадения и двухканального блока сравнения и с задающим входом блока задания уставок, выход которого подсоединен к вычитающему входу первого реверсивного счетчика и входу обнуления второго реверсивного счетчика, первый и второй выходы двухканального блока сравнения подключены соответственно к первому и второму информационным входам порогового блока, первый выход которого соединен с первым командным входом двухканального блока сравнения, второй командный вход которого связан с вторым выходом порогового блока и четвертью входом блока индикации, выходы коммутатора с первого по четвертьш подключены соответственно к первому и второму входам первого логического блока, суммирующему входу второ.го реверсивного счетчика и входу сравнения блока совпадения, выход которого соединен с третьим входом коммутатора,, входами обнуления первого и второго реверсивных счетчиков и входом счетчика, выход которого подключен к третьему входу блока индикации и третьему информационному входу порогового блока, отличающеео с я тем, что, с целью повышения быстродействия устройства за счет (Л сокращения числа шагов при определении области работоспособности на участках с высокой крутизной, оно содержит также первый и второй элементы И, блок анализа, состоящий из элементов И с третьего по восьмой, первого и второго элементов ИПН, пер00 вого и второго элементов задержки, о триггеров с первого по четвертый и 00 элемента НЕ, а также второй логи4;; ческий блок, состоящий из девятого и десятого элементов И, третьего и четвертого элементов задержки, третьего, четвертого и пятого элементов РШИ, и третий логический блок, состоящий из пятого и шестого элементов задержки, одиннадцатого и двенадцатого элементов И, шестого, седьмого и восьмого элементов ИЛИ, первый выход первого логического блока связан с входом третьего элемента задержки и вторыми входами третьего и пятого элементов ИЛИ, второй выход первого логического блока - с входом
Изобретение относится к: области автоматики и может быть использовано при контроле за состоянием технических объектов.
Цель изобретения - повышение быстродействия устройства за счет сокращения числа шагов при определении области работоспособности на участках с высокой крутизной.
Суть изобретения состоит в том, что в известных устройствах при определении области работоспособности технических объектов на участках, где граница значительно (т.е. высокой крутизной) изменяется по одной из координат, вьтолняются шаги, которые не несут информацию о личии границы области, а необходимы ..
только для изменения направления шага по координате.
В таких устройствах для определения двух соседних отображающих точек по которым затем строится область работоспособности, необходимо выполнить N шагов. Если через Nf, обозначить количество шагоВч, несущих полезную информацию о наличии перехода через границу области работоспособности, то коэффициент задей/ твования устройства равен
.
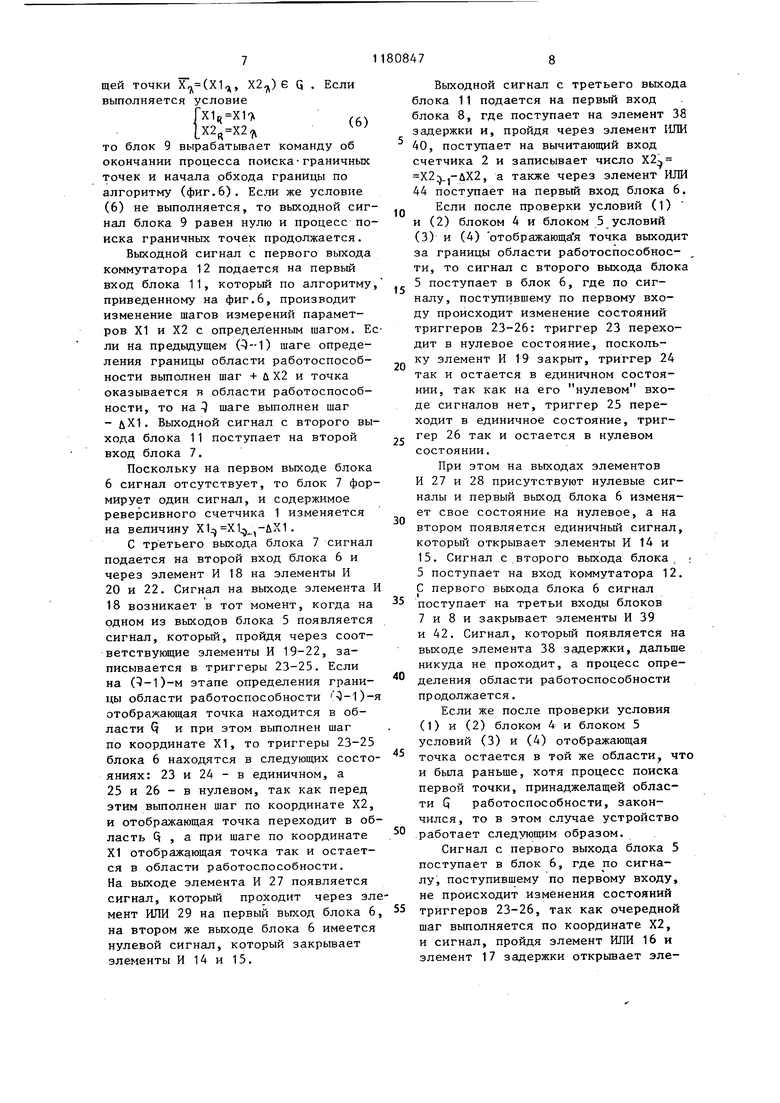
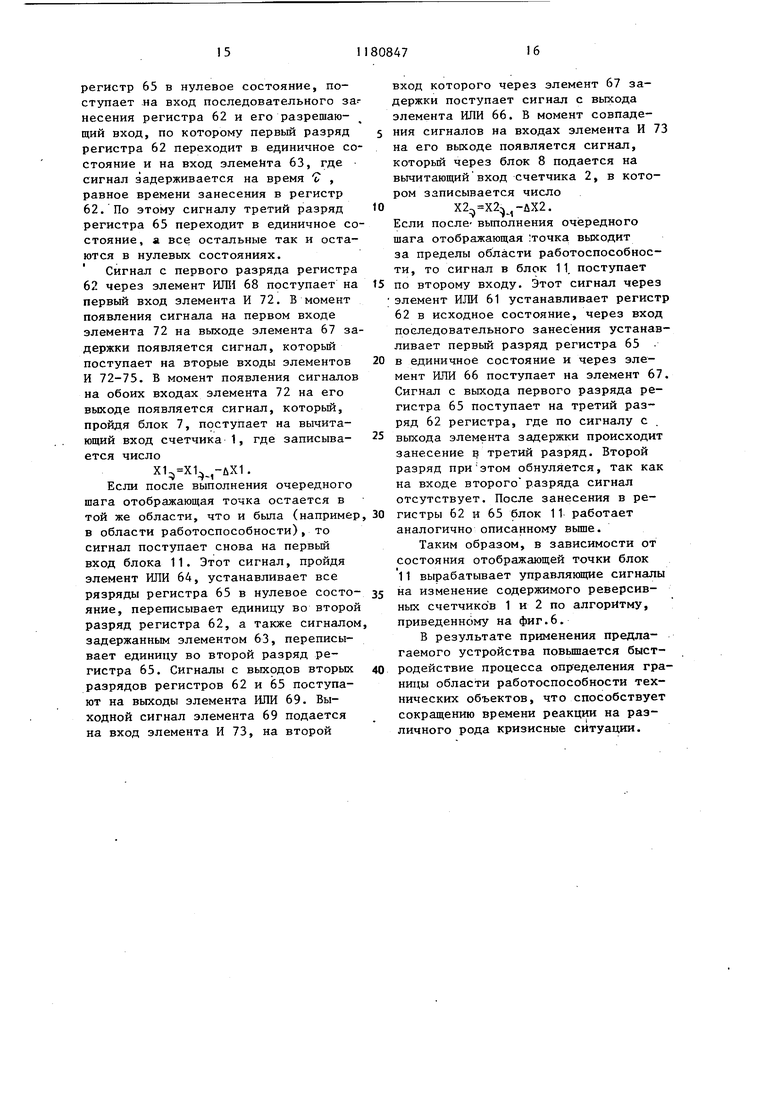
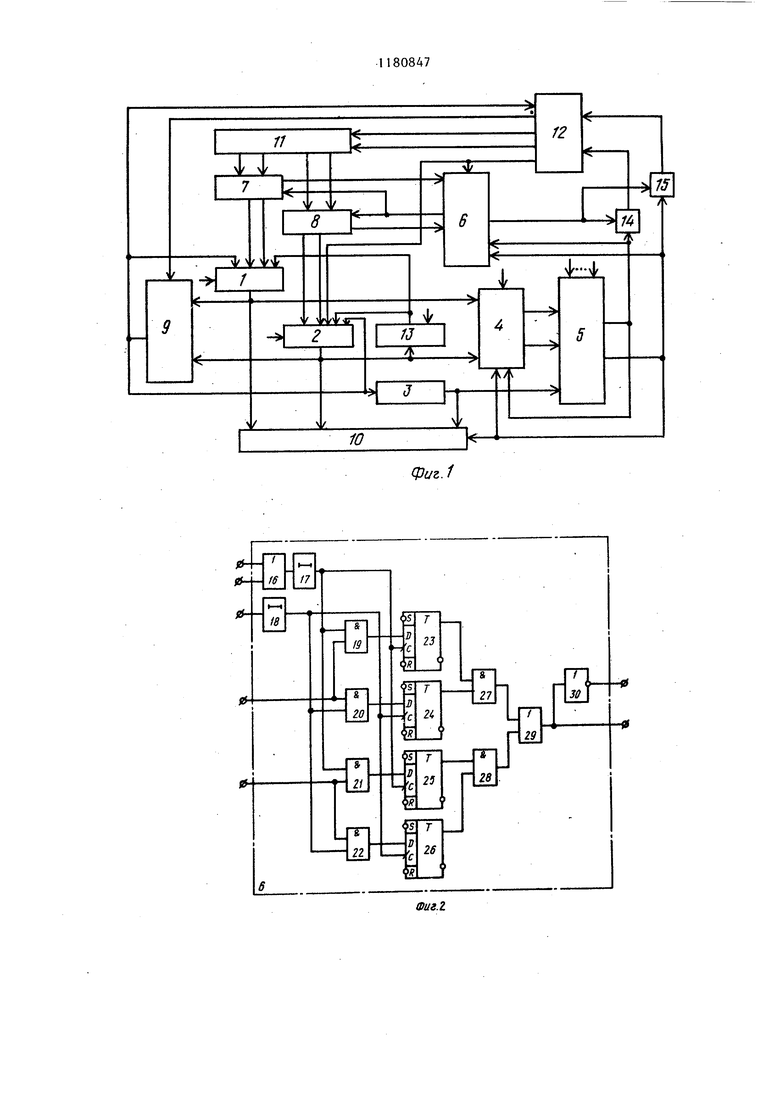
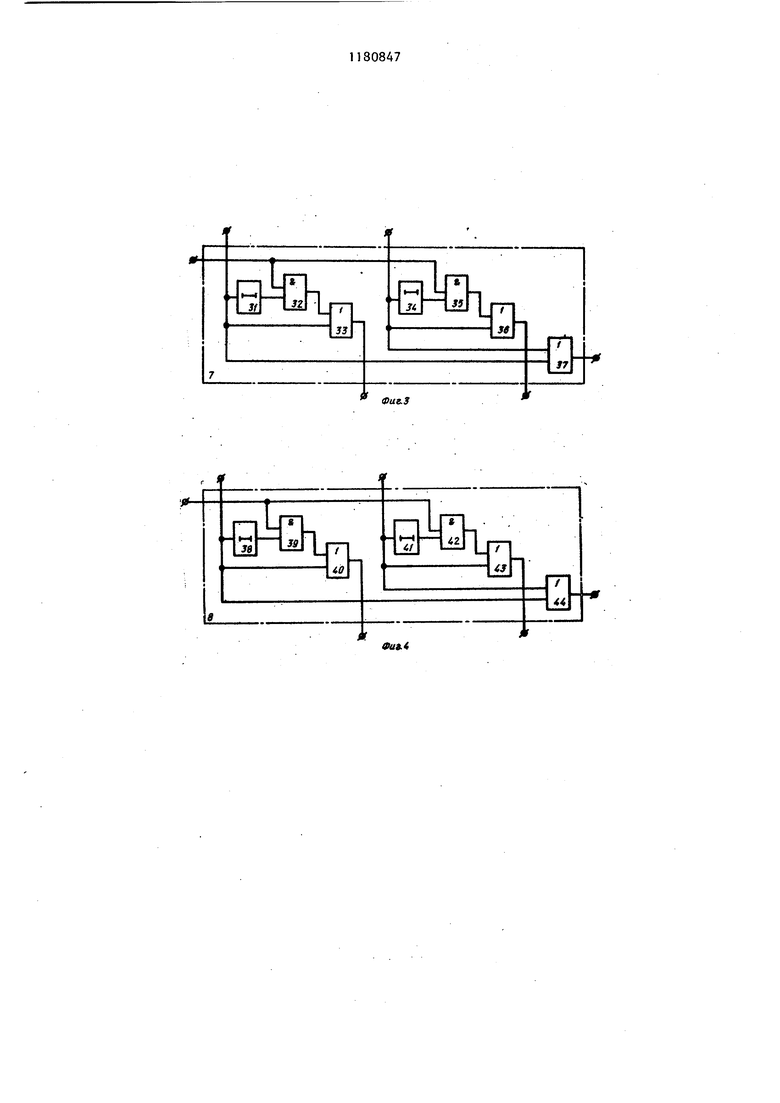
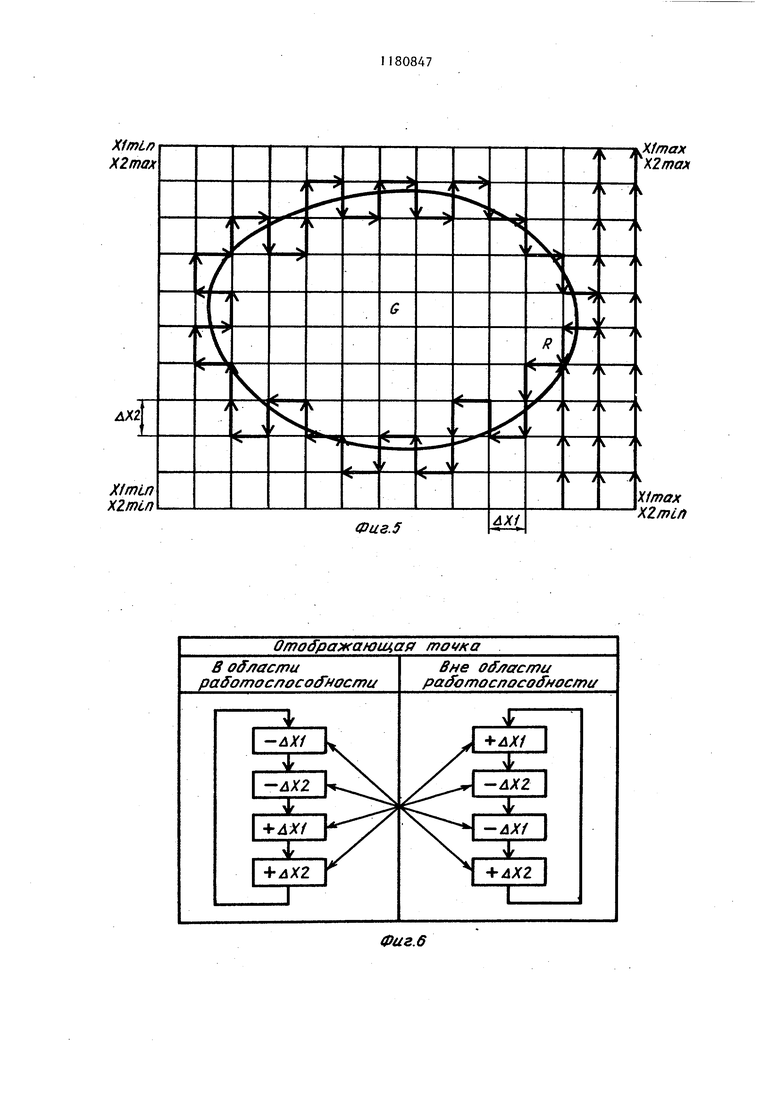
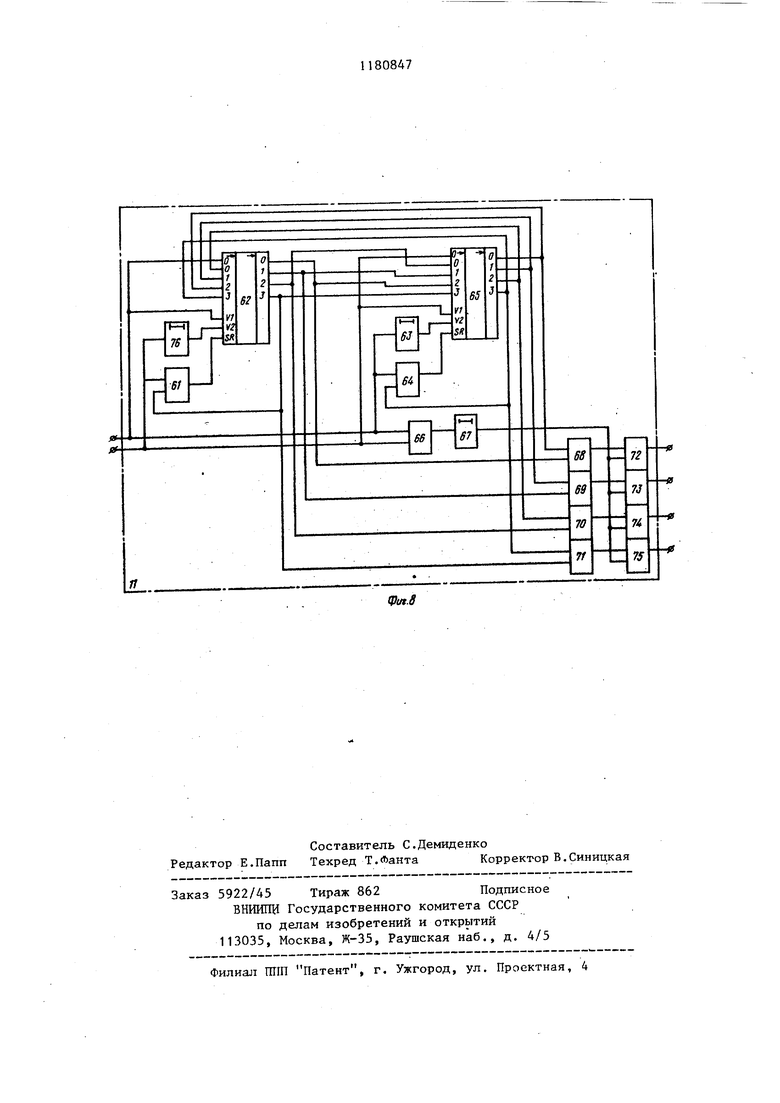
.Коэффициент показывает, какую часть в общем количестве шагов определения границы области работоспособности занимают шаги, несущие информацию о переходе через границу области. Для повышения коэффициента задействования и быстродействия устройства в изобретении используется процедура определения круто изменяющейся границы с меньшим количеством шагов, чем в известном устройстве, где на участке с высокой крутизной границы для определения первой точки выполняется четыре шага, после чего отображающая точка возвращается в исходное состояние и изменяется направление шага, а после этогй выполняется еще три шага для определения второй отображающей точки. В предлагаемом устройстве на аналогичном участке выполняется три шага, т.е. в среднем в два раза возрастает быстродействие. На фиг.1 приведена структурная схема устройства; на фиг.2 - схема блока анализаi на фиг.З и 4 - схемы второго и третьего логических блоков на фиг.З - диаграмма построения области работоспособности; на фиг.6 диаграмма выбора отклоненш первичных параметров; на фиг. 7 и 8 -схемы двухканального блока сравнения и пер вого логического блока соответственно. Устройство для определения границ области работоспособности содержит первьй 1 и второй 2 реверсивные счет чики, счетчик 3, двухканальный блок 4 сравнения, пороговьм блок 5, блок 6 анализа, второй 7 и третий 8 логические блоки, блок 9 совпадения, блок 10 индикации, первый логический блок 11, коммутатор 12, блок 13 задания уставок, первый 14 и второй 15 элементы И. Блок 6 анализа включает первьй элемент ИЛИ 6, первый 17 и второй 1 элементы задержки, третий 19, четвертый 20, пятый 21 и шестой 22 эле менты И, первый 23, второй 24, третий 25 и четвертьй 26 триггеры, сед мой 27 и восьмой 28 элементы И, вто рой элемент ИЛИ 29 и элемент НЕ 30. Второй логический блок 7 содержи третий элемент 31 задержки, девятый элемент И 32, третий элемент ИЛИ 33 четвертьА элемент 34 задержки, десятый элемент И 35, четвертый 36 и пятый 37 элементы ИЛИ. Третий логический блок 8 включае пятый элемент 38 задержки, одиннадцатый элемент И 39, шестой элемент ИЛИ 40, шестой элемент 41 задержки. 474 двенадцатый элемент И 42, седьмой 43 и восьмой 44 элементы 1ШИ. Второй и третий логические блоки тождественны по структуре. Двухканальньй блок 4 сравнения содержит регистры 45-50, элементы И 51-54, элементы 55-58 сравнения и коммутаторы 59 и 60. Первый логический блок 11 содержит девятый элемент ИЛИ 61 седьмой регистр 62-, седьмой элемент 63 задержки, десятый элемент ИЛИ 64, восьмой регистр 65, одиннадцатьй элемент ИЛИ 66, восьмой элемент 67 задержки, элементы ИЛИ 68-71, элементы И 72-75 и девятьй элемент 76 задержки. На диаграмме построения зоны работоспособности, изображенной на фиг.5, приняты следующие обозначеХ2,-п 2 ахсоX1m,-n« max ния: ответственно минимальные и максимальные допустимые значения первичных параметров; Х1 и &Х2 - шаг изменения первичного параметра, G - область работоспособности технического объекта; Р - область допустимых значений первичных параметров, определяемых неравенствами: Х1, , Х2 ;„ Х2ёХ2„о,х. Устройство плботает следующим образом. Вначале определяются координаты первой точки, принадлежащей области G. Для этого в блоки 1 и 2 вводят координаты исходной , равные соответственно Х1,, ,. Содержимое счетчика 3 () и содержимое ячеек 21, Z 2, Z3 и Z4 блока 4 равно нулю. В блок 13 вводят число, равное Х2д,др На входах установки порогов блока 5 задают условия работоспособности - У: У;яа;()Выходные сигналы блоков 1 и 2, равные соответственно XIj и Х2, сравниваются с содержимьп- ячеек Z1, Z2, Z3 и Z4 блока 4. Так как условия не выполняются, то сигналы XI и Х2, и сигналы с выхода счетчика 3 Х3| подаются на входы блока 5 и бло-.
ка 10. Выходной сигнал пода-ется на вход блока 13. В блоке 6 триггеры 23-26 находятся в нулевом состоянии, и на втором выходе блока 6 имеется сигнал, который разрешает прохождение сигналов через элементы 14 и 15.
Если при определенных назначениях первичных параметров ХЦ, Х2 и ХЗ не вьшолняются условия работоспособности
(Х1, Х2, ХЗ) (3) где ( j 1,m),
, Vj(xi, Х2, X3).)
где и соответственно t-шнимальное и максимальное допустимые значения j -го () выходного параметра,
то на втором выходе блока 5 появляется сигнал, который в ячейках памяти Z3 и Z4 блока 4 фиксирует координаты отображающей точки, лежащей вне области G (в Z3-X1, в Z4-X2p. Кроме того, сигнал с второго выхода блока 5 подается на первый вход элемента 15 и на четвертый вход блока 6. Поскольку изменений по Л XI и UХ2 не происходит, то на первых входах элементов И 19-22 сигнал отсутствует и изменения состояния блока 6 не происходит. На втором выходе блока 6 имеется единичньй сигнал. Сигнал с выхода блока 5 проходит через элемент И 15 и подается на второй вход блока 12. Сигнал с третьего выхода коммутатора п-одается на суммирующий вход блока 2, в котором записывается число
,;„-ЬЛХ2,
и на пятый вход блока 6, где сигнал пройдя через элемент ИЛИ 16, подается на элемент 17 задержки. Выходные сигналы счетчиков 2 и 1 опять сравниваются с содержимым ячеек Zlj Z2, Z3 и Z4 блока 4 и, так как условия (1) и (2) опять не вьтолняются, то в блоке 5 снова проверяются условия (3) и (4). Выходной сигнал с второго выхода блока 5 подается на элемент И 15, блок 4 и блок 10, а также, на четвертый вход |блока 6, где сигнал поступает на вторые входы элементов И 21 и 22. Задержанный сигнал с выхода элемента И 17 поступает на входы элементов И
19 и 21. Сигнал, который записан в триггер 25 по ааднему фронту сигнала появится только на выходе элемента 21. Так как происходит изменение .только одного триггера, тона выходе блока 6 состояние не изменяется.
Процесс поиска первой точки, принадлежащей области G, путем увеличения координаты Х2 на величину АХ2 на каждом этапе и сравнения с содержимым ячеек JJ1, 22, Z3 и 24 продолжается до тех пор, пока не обнаруживается точка R е ( , либо в блоке 13 не выполняется условие
., (5
Если это условие не выполняется, то на вькоде блока 13 появляется сигнал, который подается на вход установки в исходное состояние счетчика 2 и на вычитающий вход счетчика 1 , в котором записывается число Х1| ЛХ1. Затем цикл определения точки не Q повторяется (фиг.5).
Если при очередном шаге по координате Х2 отображающая точка переходит в область работоспособности (точка Р, фиг.5), то в ячейках памяти ЕЗ и Z4 блока 4 записываются координаты предьщущей точки, находящейся вне области G, а в ячейках 21 HZ2 - координатыточки Д (в 21Х1д., Z 2-Х2„) . В этом случае триггер 25 блока 6 находится в единичном, а триггеры 23, 24 и 26 - в нулевом состоянии. На втором выходе блока 6 будетсигнал, разрешающий прохождение сигналов через элементы 14., 15.
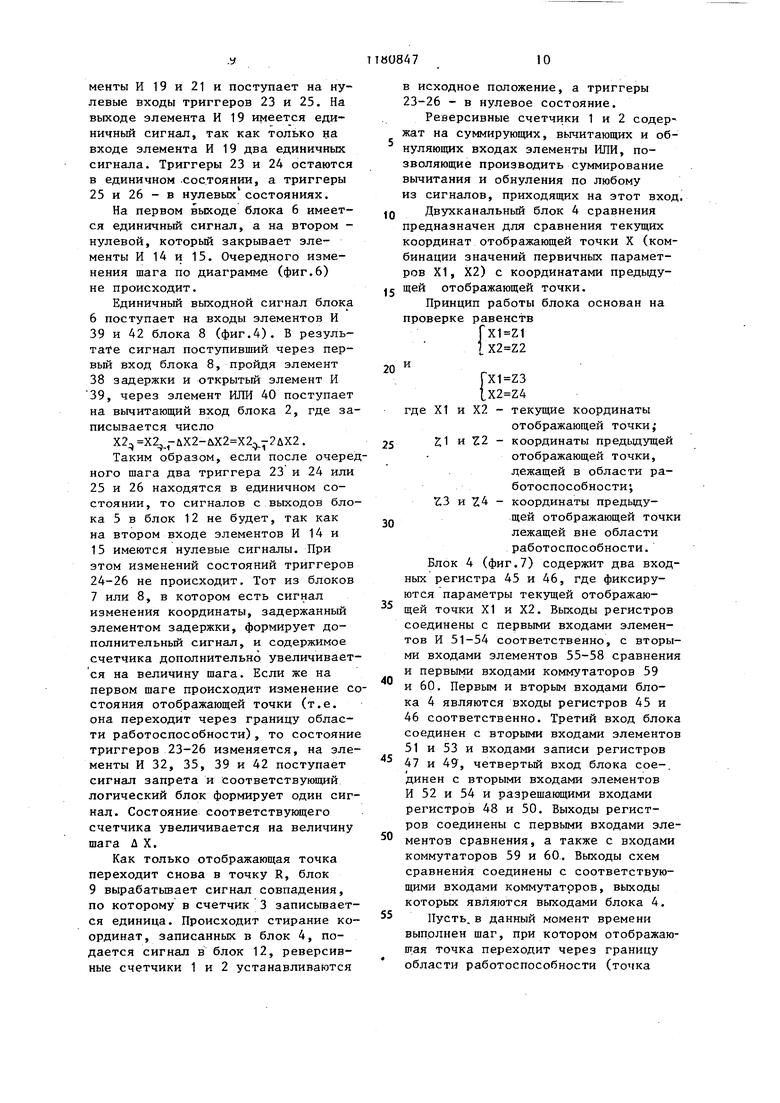
После того, как на первом выходе блока 5 появляется сигнал, по которому блок 10 фиксирует координаты точки В, (Х1 , Х25,,), он поступает на третий вход блока 6, где происходит изменение состояния триггеров: триггер 23 устанавливается в единичное состояние, 25 - в нулевое по заднему фронту синхросигнала, а 24 и 26 остаются в нулевых состояниях. Сигнал с выхода блока 5 через открытый элемент 14 поступает на первый вход коммутатора 12. При появлении сигнала на первом входе коммутатора 12 появляются сигналы на его первом и четвертом выходах. .Сигнал с четвертого выхода коммутатора 12 подается на третий вход блока 9, где происходит фи ссирование координаты точки Д и сравнение этих координат с текущими координатами отображающей точки X(X1, Х2) 6 Q . Если выполняется условие , то блок 9 вырабатывает команду об окончании процесса поискаграничных точек и начала обхода границы по алгоритму (фиг.6). Если же условие (6) не выполняется, то выходной сиг нал блока 9 равен нулю и процесс по иска граничных точек продолжается. Выходной сигнал с первого выхода коммутатора 12 подается на первый вход блока 11, который по алгоритму приведенному на фиг.6, производит изменение шагов измерений параметров XI и Х2 с определенным шагом. Е ли на предьщущем Q-l) шаге определения границы области работоспособности выполнен шаг + и Х2 и точка оказывается в области работоспособности, то на Q шаге выполнен шаг - &Х1. Выходной сигнал с второго вы хода блока 11 поступает на второй вход блока 7. Поскольку на первом выходе блока 6 сигнал отсутствует, то блок 7 фор мирует один сигнал, и содержимое реверсивного счетчика 1 изменяется на величину . С третьего выхода блока 7 сигнал подается на второй вход блока 6 и через элемент И 18 на элементы И 20 и 22. Сигнал на выходе элемента 18 возникает в тот момент, когда на одном из выходов блока 5 появляется сигнал, которьш, пройдя через соответствующие элементы И 19-22, записывается в триггеры 23-25. Если на (-1)-м этапе определения границы области работоспособности -5-1 )отображающая точка находится в области Q и при этом выполнен шаг по координате XI, то триггеры 23-25 блока 6 находятся в следующих состо яниях: 23 и 24 - в единичном, а 25 и 26 - в нулевом, так как перед этим выполнен шаг по координате Х2, и отображающая точка переходит в об ласть Q , а при шаге по координате XI отображающая точка так и остается в области работоспособности. На выходе элемента И 27 появляется сигнал, который проходит через эл мент ЛЛИ 29 на первый выход блока 6 на втором же выходе блока 6 имеется нулевой сигнал, который закрывает элементы И 14 и 15. Выходной сигнал с третьего выхода блока 11 подается на первый вход блока 8, где поступает на элемент 38 задержки и, пройдя через элемент 1ШИ 40, поступает на вычитающий вход счетчика 2 и записывает число 2 Х2:)|-дХ2, а также через элемент ИЛИ 44 поступает на первый вход блока 6. Если после проверки условий (1) и (2) блоком 4 и блоком 5 условий (3) и (4) отображающая точка выходит за границы области работоспособности, то сигнал с второго выхода блока 5 поступает в блок 6, где по сигналу, поступившему по первому входу происходит изменение состояний триггеров 23-26: триггер 23 переходит в нулевое состояние, поскольку элемент И 19 закрыт, триггер 24 так и остается в единичном состоянии, так как на его нулевом входе сигналов нет, триггер 25 переходит в единичное состояние, триггер 26 так и остается в нулевом состоянии. При этом на вькодах элементов И 27 и 28 присутствуют нулевые сигналы и первый выход блока 6 изменяет свое состояние на нулевое, а на втором появляется единичйьш сигнал, который открывает элементы И 14 и 15. Сигнал с второго выхода блока, ; 5 поступает на вход коммутатора 12. С первого выхода блока 6 сигнал поступает на третьи входы блоков 7 и 8 и закрывает элементы И 39 и 42. Сигнал, который появляется на выходе элемента 38 задержки, дальше никуда не проходит, а процесс определения области работоспособности продолжается. Если же после проверки условия (1) и (2) блоком 4 и блоком 5 условий (3) и (4) отображающая точка остается в той же области, что и была раньше, хотя процесс поиска первой точки, принаджелащей области Q работоспособности, закончился , то в этом случае устройство работает следующим образом. Сигнал с первого выхода блока 5 поступает в блок 6, где по сигналу, поступившему по первому входу, не происходит изменения состояний триггеров 23-26, так как очередной шаг выполняется по координате Х2, и сигнал, пройдя элемент ИЛИ 16 и элемент 17 задержки открывает элементы И 19 и 21 и поступает на нулевые входы триггеров 23 и 25. На выходе элемента И 19 имеется единичный сигнал, так как только уа входе элемента И 19 два единичных сигнала. Триггеры 23 и 24 остаются в единичном .состоянии, а триггеры 25 и 26 - в нулевыхсостояниях.
На первом выходе блока 6 имеется единичный сигнал, а на втором нулевой, который закрывает элементы И 14 и 15. Очередного изменения шага по диаграмме (фиг.6) не происходит.
Единичный выходной сигнал блока
6поступает на входы элементов И 39 и 42 блока 8 (фиг.4). В результате сигнал поступивший через первьй вход блока 8, пройдя элемент 38 задержки и открытый элемент И
39, через элемент ИЛИ 40 поступает на вычитающий вход блока 2, где записывается число
Х2, Х2 -йХ2-ЛХ2 Х2; -2йХ2.
Таким образом, если после очереного шага два триггера 23 и 24 или 25 и 26 находятся в единичном состоянии, то сигналов с выходов блока 5 в блок 12 не будет, так как на втором входе элементов И 14 и 15 имеются нулевые сигналы. При этом изменений состояний триггеров 24-26 не происходит. Тот из блоков
7или 8, в котором есть сигнал изменения координаты, задержанный элементом задержки, формирует дополнительный сигнал, и содержимое счетчика дополнительно увеличивается на величину шага. Если же на первом шаге происходит изменение сстояния отображающей точки (т.е. она переходит через границу области работоспособности), то состояни триггеров 23-26 изменяется, на элементы И 32, 35, 39 и 42 поступает сигнал запрета и соответствующий логический блок формирует один сигнал. Состояние соответствующего счетчика увеличивается на величину шага Д X.
Как только отображающая точка переходит снова в точку R, блок 9 вырабатьшает сигнал совпадения, по которому в счетчик 3 записывается единица. Происходит стирание координат, записанных в блок 4, подается сигнал в блок 12, реверсивные счетчики 1 и 2 устанавливаются
в исходное положение, а триггеры 23-26 - в нулевое состояние.
Реверсивные счетчики 1 и 2 содержат на суммирующих, вычитающих и обнуляющих входах элементы ИЛИ, позволяющие производить суммирование вычитания и обнуления по любому из сигналов, приходящих на этот вход
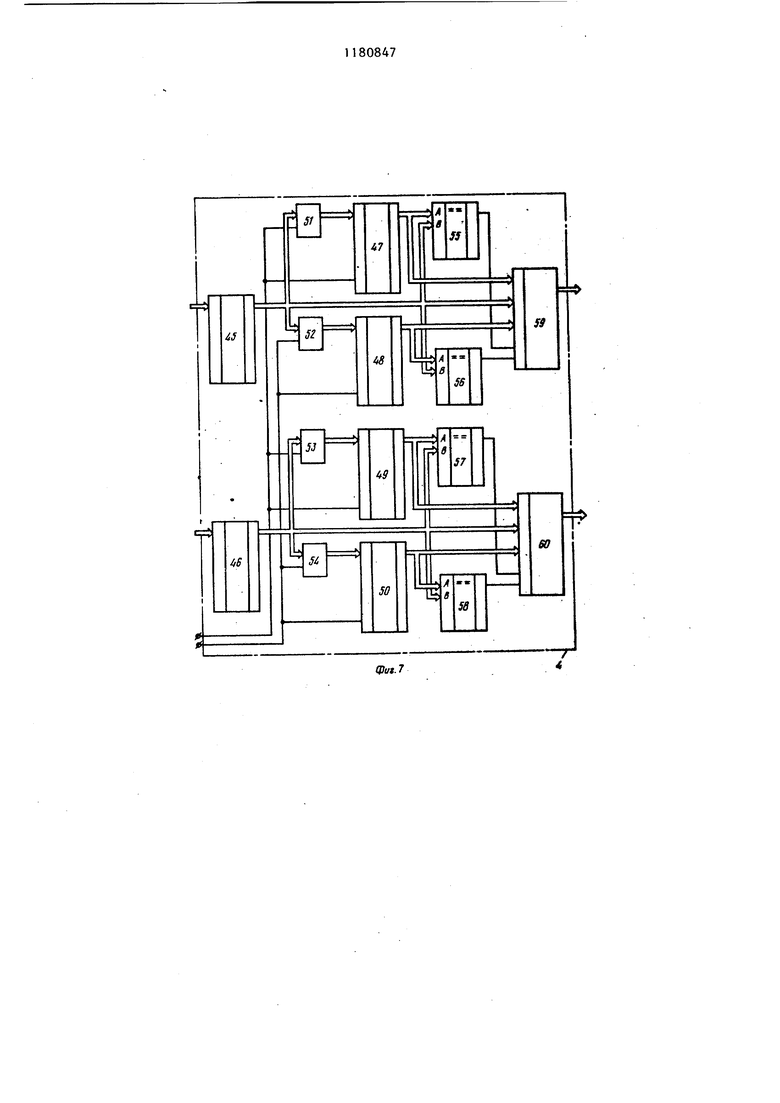
Двухканальньш блок 4 сравнения предназначен для сравнения текущих координат отображающей точки X (комбинации значений первичных параметров XI, Х2) с координатами предыдущей отображающей точки.
Принцип работы блока основан на проверке равенств
С
,
где XI и X2 - текущие координаты отображающей точки; 2;1 и 7:2 - координаты предыдущей отображающей точки, лежащей в области работоспособности;
Z3 и Z4 координаты предыдущей отображающей точки лежащей вне области работоспособности. Блок 4 (фиг.7) содержит два входных регистра 45 и 46, где фиксируются параметры текущей отображающей точки XI и Х2. Выходы регистров соединены с первыми входами элементов И 51-54 соответственно, с вторыми входами элементов 55-58 сравнения и первыми входами коммутаторов 59 и 60. Первым и вторым входами блока 4 являются входы регистров 45 и
46соответственно. Третий вход блока соединен с вторыми входами элементов 51 и 53 и входами записи регистров
47и 49, четвертый вход блока сое-, динен с вторыми входами элементов И 52 и 54 и разрешающими входами регистров 48 и 50. Выходы регистров соединены с первыми входами элементов сравнения, а также с входами коммутаторов 59 и 60. Выходы схем сравнения соединены с соответствующими входами коммутаторов, выходы которых являются выходами блока 4.
Пусть, в данный момент времени выполнен шаг, при котором отображающая точка переходит через границу области работоспособности (точка
В, фиг.5). Предыдущая точка находится вне области работоспособности и ее координаты зафиксированы в ячейках 23 и 24 (в регистрах 48 и 50). Содержимое реверсивных счетчиков 1 И-2 подается на первый и второй входы блока 4, где оно фиксируется в регистрах 45 и 46, с выходов которых координаты текущей отображающей точки R поступают на вторые входы элементов 55-58 сравнения. Поскольку в ячейках 7, и 7,2 (в регистрах 47 и 49) ничего не записано (они находятся в нулевых состояниях) , то на выходах схем 55 и 57 сравнения имеются нулевые сигналы, которые поступают на коммутатор 59. На вторые входы коммутаторов также подаются нулевые сигналы, так как координаты предыдущей и текущей точек не совпадают. Через коммутаторы 59 и 60 на выход блока 4 поступают координаты текущей точки R .
После вычисления функции и проверки условия работоспособности блоком 5 на первом выходе его появляется сигнал, который поступает на третий вход блока 4. По этому сигналу открьгоаются элементы И 51 и 53 и значения текущей точки R записываются в регистры 47 и 49.
После выполнения очередного шага содержимое реверсивных счетчиков 1 и 2 подается на первый и второй входы блока 4. Текущие координаты XI и Х2 запоминаются в регистрах 45 и 46, содержимое которых сравнивается с содержимым регистров 47, 49 и 48, 50. Так как очер,едной шаг (после точки R) выполнен по координате Х1 и изменяется только значение реверсивного счетчика 1, а содержимое реверсивного счетчика 2 остается без изменения, то после сравнения на первый выход блока 4 передается содержимое регистра 45, а на второй выход - содержимое регистра 47. ПРИ этом логический блок 5 вычисляет функцию паботоспособности только от одной переменной Х1, так как от Х2 вычислялось на предыдущем шаге.
Затем координаты текущей отображающей точки фиксируются в ячейках Z1 и 7.2 (регистрах 47 и 49) и процесс сравнения повторяется аналогичным образом.
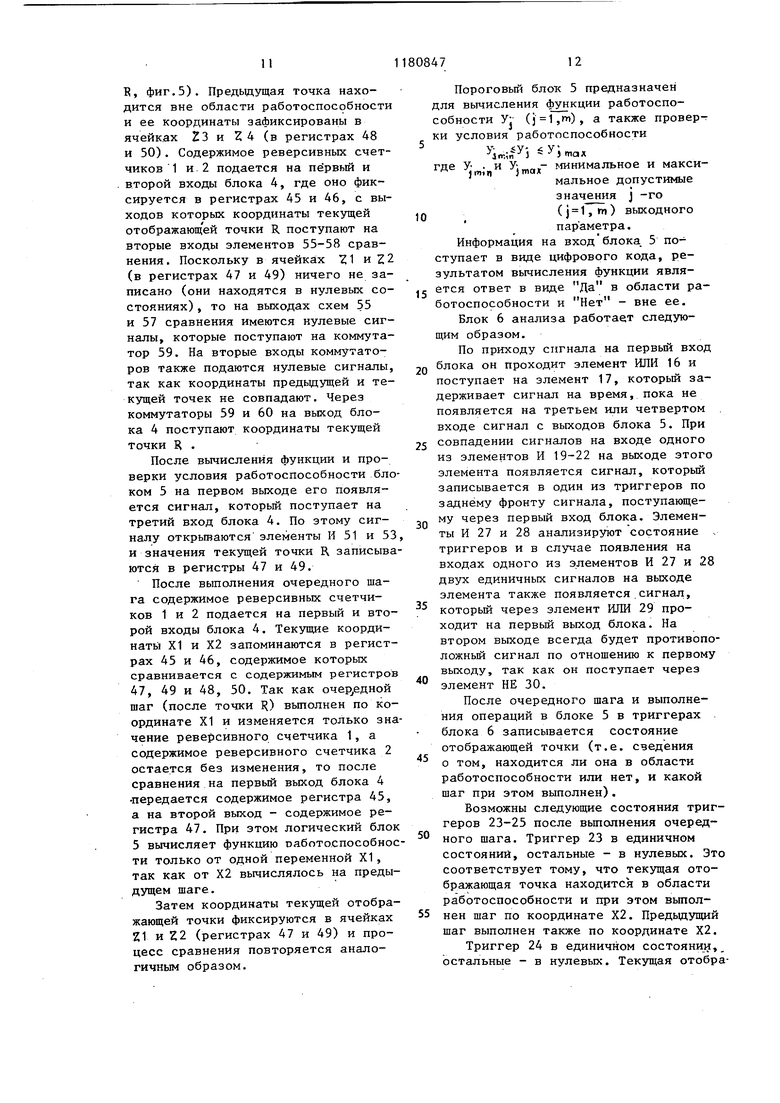
Пороговый блок 5 предназначен для вычисления функции работоспособности у- (,), а также проверки условия работоспособности
V- v- v ) max
где У . и У;„„,минимальное и максиjmin jmax мальное допустимые значения J -го (j 1,m) выходного
параметра.
Информация на вход блока. 5 поступает в виде цифрового кода, результатом вычисления функции является ответ в виде Да в области ра5ботоспособности и Нет - вне ее.
Блок 6 анализа работает следующим образом.
По приходу сигнала на первый вход блока он проходит элемент ИЛИ 16 и
0 поступает на элемент 17, который задерживает сигнал на время, пока не появляется на третьем или четвертом входе сигнал с выходов блока 5. При совпадении сигналов на входе одного
5 из элементов И 19-22 на выходе этого элемента появляется сигнал, который записывается в один из триггеров по заднему фронту сигнала, поступающему через первый вход блока. Элемен0ты И 27 и 28 анализируют состояние триггеров и в случае появления на входах одного из элементов И 27 и 28 двух единичных сигналов на выходе элемента также появляется.сигнал,
5 который через элемент ИЛИ 29 проходит на первый выход блока. На втором выходе всегда будет противоположный сигнал по отношению к первому выходу, так как он поступает через
0 элемент НЕ 30.
После очередного шага и выполнения операций в блоке 5 в триггерах блока 6 записывается состояние отображающей точки (т.е. сведения
5 о том, находится ли она в области работоспособности или нет, и какой шаг при этом выполнен).
Возможны следующие состояния триггеров 23-25 после выполнения очеред0ного шага. Триггер 23 в единичном СОСТОЯНИЙ, остальные - в нулевых. Это соответствует тому, что текущая отображающая точка находится в области работоспособности и при этом выпол5нен шаг по координате Х2. Предьщущий шаг выполнен также по координате Х2.
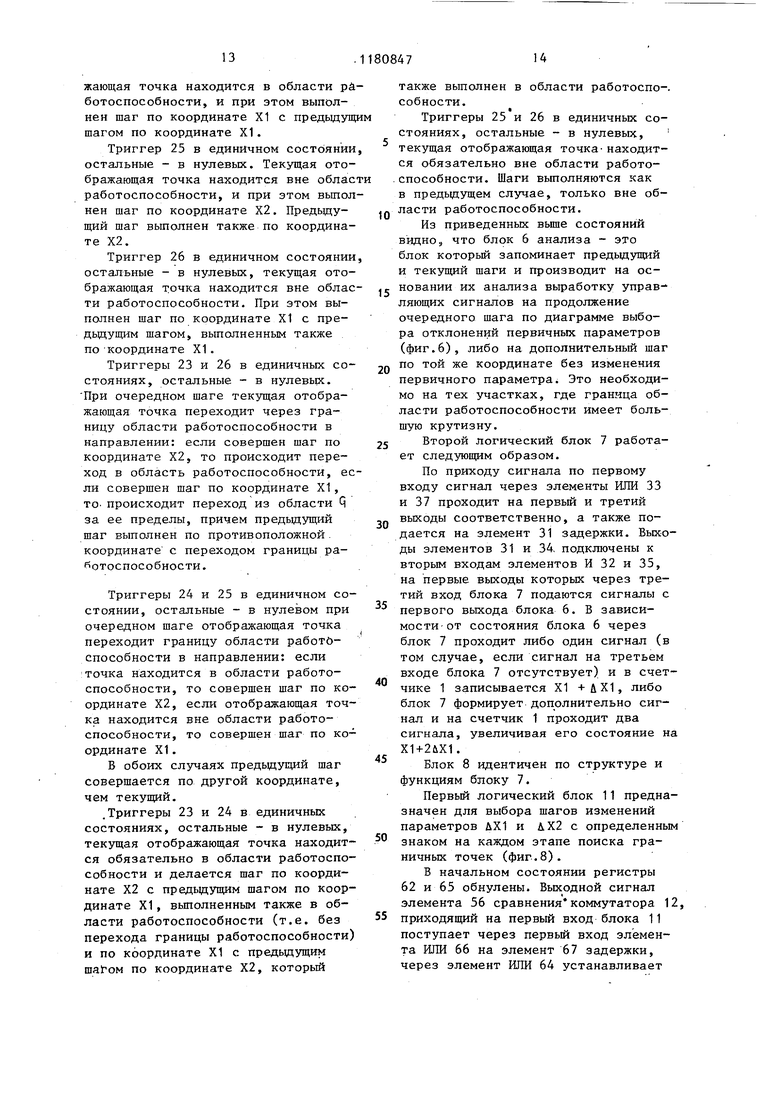
Триггер 24 в единичном состоянии, остальные - в нулевых. Текущая отображающая точка находится в области ра ботоспособности, и при этом выполнен шаг по координате Х1 с предьщущ шагом по координате XI. Триггер 25 в единичном состоянии остальные - в нулевых. Текущая отображающая точка находится вне облас работоспособности, и при этом вьшол нен шаг по координате Х2. Предыдущий шаг выполнен также по координате Х2. Триггер 26 в единичном состоянии остальные - в нулевых, текущая отображающая точка находится вне облас ти работоспособности. При этом выполнен шаг по координате XI с предьщущим шагом, выполненным также по координате XI. Триггеры 23 и 26 в единичных состояниях, остальные - в нулевьк. При очередном шаге текущая отображающая точка переходит через границу области работоспособности в направлении: если совершен шаг по координате Х2, то происходит переход в область работоспособности, ес ли совершен шаг по координате Х1, то. происходит переход из области Р за ее пределы, причем предыдущий шаг выполнен по противоположной. координате с переходом границы ра отоспособности. Триггеры 24 и 25 в единичном состоянии, остальные - в нулевом при очередном шаге отображающая точка переходит границу области работоспособности в направлении: если точка находится в области работоспособности, то совершен шаг по координате Х2, если отображающая точка находится вне области работоспособности, то совершен шаг по координате XI. В обоих предьщущий шаг совершается по другой координате, чем текущий, .Триггеры 23 и 24 в единичных состояниях, остальные - в нулевых, текзпцая отображающая точка находит ся обязательно в области работоспособности и делается шаг по координате Х2 с предыдущим шагом по координате XI, выполненным также в области работоспособности (т,е, без перехода границы работоспособности) и по координате XI с предьщущим по координате Х2, который также выполнен в области работоспо-. собности. Триггеры 25 и 26 в единичных состояниях, остальные - в нулевых, текущая отображающая точка-находится обязательно вне области работоспособности. Шаги вьтолняются как в предыдущем случае, только вне области работоспособности. Из приведенных вьш1е состояний видноS что блок 6 анализа - это блок которьй запоминает предьщущий и текущий шаги и производит на основании их анализа выработку управляющих сигналов на продолжение очередного шага по диаграмме выбора отклонений первичных параметров (фиг,6), либо на дополнительный шаг по той же координате без изменения первичного параметра. Это необходимо на тех участках, где граница области работоспособности имеет большую крутизну. Второй Логический блок 7 работает следующим образом. По приходу сигнала по первому входу сигнал через элементы ИЛИ 33 и 37 проходит на первый и третий выходы соответственно, а также подается на элемент 31 задержки. Выходы элементов 31 и 34, подключены к вторым входам элементов И 32 и 35, на первые выходы которых через третий вход блока 7 подаются сигналы с первого выхода блока 6, В зависимости от состояния блока 6 через блок 7 проходит либо один сигнал (в том случае, если сигнал на третьем входе блока 7 отсутствует) и в счетчике 1 записывается XI +UX1, либо блок 7 формирует дополнительно сигнал и на счетчик 1 проходит два сигнала, увеличивая его состояние на Х1+2ЛХ1, Блок 8 идентичен по структуре и функциям блоку 7, Первый логический блок 11 предназначен для выбора шагов изменений параметров ДХ1 и ДХ2 с определенным знаком на каждом этапе поиска граничных точек (фиг,8), В начальном состоянии регистры 62 и 65 обнулены. Выходной сигнал элемента 56 сравнения коммутатора 12, приходящий на первый вход блока 11 поступает через первый вход элемента НИИ 66 на элемент 67 задержки, через элемент ИЛИ 64 устанавливает
регистр 65 в нулевое состояние, поступает .на вход последовательного за несения регистра 62 и его разрешающий вход, по которому первый разряд регистра 62 переходит в единичное состояние и на вход элемента 63, где сигнал задерживается на время , равное времени занесения в регистр 62. По этому сигналу третий разряд регистра 65 переходит в единичное состояние, а все остальные так и остаются в нулевых состояниях.
Сигнал с первого разряда регистра 62 через элемент ИЛИ 68 поступает на первый вход элемента И 72. В момент появления сигнала на первом входе элемента 72 на выходе элемента 67 задержки появляется сигнал, которьй поступает на вторые входы элементов И 72-75. В момент появления сигналов на обоих входах элемента 72 на его выходе появляется сигнал, который, пройдя блок 7, поступает на вычитающий вход счетчика 1, где записывается число
.,,-uX1 .
Если после выполнения очередного шага отображающая точка остается в той же области, что и была (например в области работоспособности), то сигнал поступает снова на первый вход блока 11. Этот сигнал, пройдя элемент ИЛИ 64, устанавливает все рязряды регистра 65 в нулевое состояние, переписывает единицу во второй разряд регистра 62, а также сигналом задержанным элементом 63, переписывает единицу во второй разряд регистра 65. Сигналы с выходов вторых разрядов регистров 62 и 65 поступают на выходы элемента ИЛИ 69. Выходной сигнал элемента 69 подается на вход элемента И 73, на второй
вход которого через элемент 67 задержки поступает сигнал с выхода элемента ИЛИ 66. В момент совпадения сигналов на входах элемента И 7 на его выходе появляется сигнал, который через блок 8 подается на вычитающий вход счетчика 2, в котором записывается число
.
Если после- выполнения очередного шага отображающая ;точка выходит за пределы области работоспособности, то сигнал в блок 11. поступает по второму входу. Этот сигнал через элемент ИЛИ 61 устанавливает регист 62 в исходное состояние, через вход последовательного занесения устанавливает первый разряд регистра 65 в единичное состояние и через элемент ИЛИ 66 поступает на элемент 67 Сигнал с выхода первого разряда регистра 65 поступает на третий разряд 62 регистра, где по сигналу с выхода элемента задержки происходит занесение в третий разряд. Второй разряд приэтом обнуляется, так как на входе второго разряда сигнал отсутствует. После занесения в регистры 62 и 65 блок 11 работает аналогично описанному выше.
Таким образом, в зависимости от состояния отображающей точки блок l 1 вьфабатывает управляющие сигналы на изменение содержимого реверсивных счетчиков 1 и 2 по алгоритму, приведенному на фиг.6.
В результате применения предлагаемого устройства повьшается быстродействие процесса определения границы области работоспособности технических объектов, что способствует сокращению времени реакции на различного рода кризисные ситуации.
Фиг.1 Klmin X2max Xtmin XZmin
Отодражающар fnot// a
В области paffomocnocofHoc/na
Вне области ра(3 отос/1осодности Xfmax X2max Ximojf XZmLn
Фиг.6
| Устройство для определения границы области работоспособности технических объектов | 1979 |
|
SU773575A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для определения границы области работоспособности технических объектов | 1977 |
|
SU744475A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
