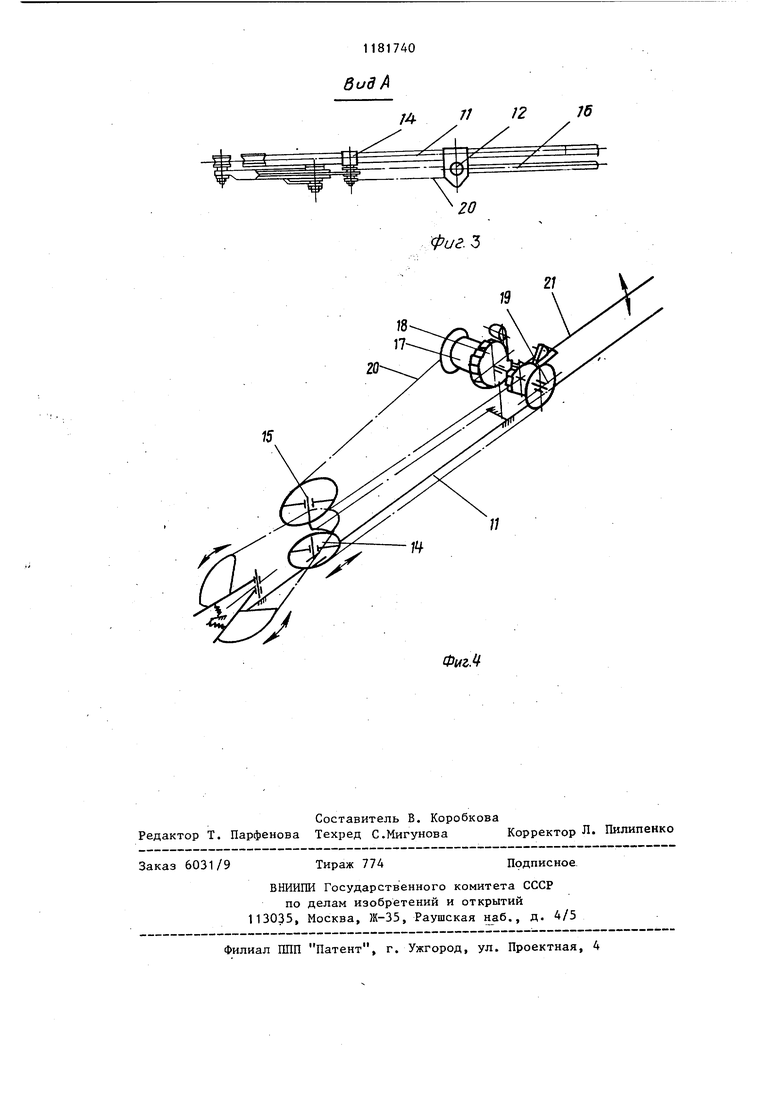
11 Изобретение относится к обработке металлов давлением, в частности к устройствам для гибки труб, преимущественно в монтажных условиях. Цель изобретения - уменьшение габаритных размеров и металлоемкости устройства. На фиг. 1 изображено устройство для гибки труб, общий вид; на фиг. 2 то же (в момент окончания гибки труб) ; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - кинематическая схема устрой ства.,: Устройство содержит гибочньй шаблон 1 с пальцем 2-, подвижные гибочны ролики 3, установленные на параллель ных осях 4 и 5, соединенных с пальце 2 кронштейнами 6 и 7 с секторами 8 и 9, пружины 10 для удержания роликов в исходном положении. Силовой привод устройства выполнен в виде смонтированных на рукоятке 11 посредством оси 12. неподвижного блока 13, установленного с возможностью поворота, и подвижного бло ка 14, закрепленного на оси 15 с возможностью возвратно-поступательного перемещения. К оси 15 прикреплена гибкая связь 16, концы-которой закреплены на секторах 8 и 9. Блок 13 состоит из закрепленных на оси 12 барабана 17с храповым механизмом 1.8 и блока 19. Блок 13 кинематически связан с блоком 14 посредством гибкой связи 20. Для передачи-движения силовому приводу используют съемную ручку 21. 02 Устройство работает следующим образом. Изгибаемую трубку 22 вводят между гибочным шаблоном 1 и подвижными гибочными роликами 3. Качательными движениями ручки 21 посредствлм храпового механизма 18 при1зодится во вращение барабан 17, и гибкая связь 20, наматываясь на последний, перемещает по рукоятке 11 подвижный блок 14, который посредством гибкой связи 16, закрепленной на оси 15, поворачивает одновременно в противоположные стороны относительно пальца 2 секторы и 9 совместно с кронштейнами 6 и / и гибочными роликами 3. При этом гибкая связь 16 сходит с секторов по касательной, а ролики 3 перемещаются по дуге окружности и, поворачиваясь относительно осей 4 и 5, передают усилие на трубу 22 изгибая последнюю по шаблону 1. По окончании гибки освобождают храповой механизм 18, снимают ручку 21, и под действием пружин 10 гибочные ролики 3 возвращаются в исходное положение. Применение предлагаемого устройства для гибки труб позволяет изгибать трубы большого диаметра. Помимо этого, трудоемкость изготовления одного трубогиба снижается до 80 м/ч, вместо 148 м/ч, затрачиваемых на изготовление трубогйба известной конструкции, и вдвое уменьшается масса трубогиба.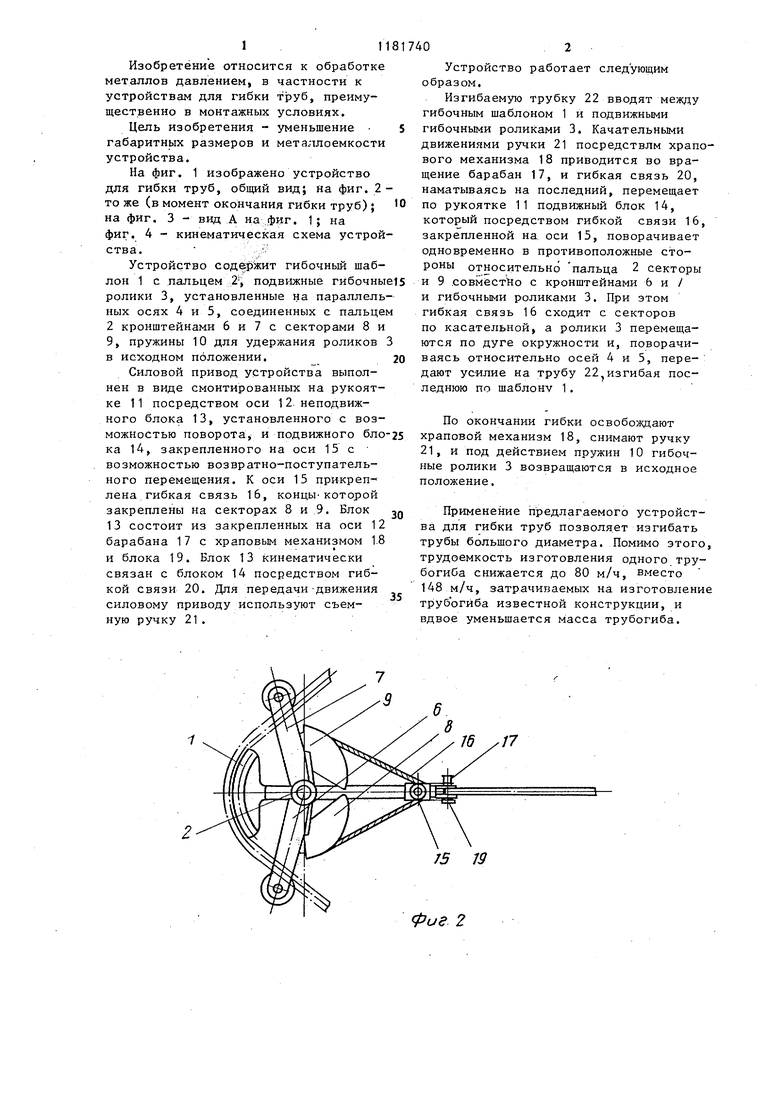
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 1995 |
|
RU2084301C1 |
| РУЧНОЙ ТРУБОГИБ | 2012 |
|
RU2521910C1 |
| НОЖНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 2000 |
|
RU2191081C2 |
| Трубогиб | 1985 |
|
SU1428486A1 |
| Трубогиб с ручным приводом | 1990 |
|
SU1801662A1 |
| Трубогиб с ручным приводом | 1986 |
|
SU1424909A1 |
| Станок для гибки металла с ручным приводом | 2021 |
|
RU2757170C1 |
| ПЕРЕНОСНОЙ ТРУБОГИБ | 1984 |
|
SU1292240A1 |
| Ручной трубогиб | 1982 |
|
SU1118450A1 |
| Устройство для гибки труб | 1990 |
|
SU1771847A1 |
УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ преимущественно в монтажных уело- ВИЯХ, содержащее гибочный шаблон с пальцем, подвижные гибочные ролики, установленные на параллельных осях. соединенных кронштейнами с пальцем, силовой привод с ручкой для передачи ему движения, закрепленные на рукоятке, отличающееся тем, что, с целью уменьшения габаритных размеров и металлоемкости, каждый кронштейн снабжен сектором, а биловой привод выполнен в виде смонтированных на рукоятке посредством осей и кинематически связанных между собой подвижного и неподвижного блоков, при этом на оси последнего закреплена гибкая связь, концы которой прикреплены к секторам. (Л С
| Устройство для гибки труб | 1976 |
|
SU608582A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
