(л
с

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Трубогибочный станок | 1989 |
|
SU1687328A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ГИБКИ СТЕРЖНЕВЫХ ЗАГОТОВОК | 2004 |
|
RU2270732C1 |
| РУЧНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 1995 |
|
RU2084301C1 |
| НОЖНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 2000 |
|
RU2191081C2 |
| ПОЛУАВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ГИБКИ ТРУБ | 1970 |
|
SU259616A1 |
| Установка для изготовления витого магнитопровода электрической машины | 1989 |
|
SU1695453A1 |
| Станок для подгибки труб в панелях | 1973 |
|
SU496941A1 |
| Установка для изготовления витого магнитопровода электрической машины | 1989 |
|
SU1690098A2 |
Использование: гибка труб в монтажных условиях. Сущность изобретения: устройство содержит гибочный шаблон, установленный с возможностью возвратно-поступательного перемещения перпендикулярно оси гибки в направляющих пазах, выполненных в корпусе, и гибочные ролики, размещенные на концах вилки кронштейна, установленного с возможностью возвратно-поступательного перемещения перпендикулярно оси гибки также в направляющих пазах корпуса. При этом гибочный шаблон имеет хвостовик, выполненный в виде резьбовой пары винт-гайка, которая выполнена в виде пологе цилиндра с наружной резьбой, смонтированного в корпусе посредством подшипников и соединенного С кронштейном посредством резьбовой втулки. Направление резьбы резьбовых пар: резьбовая втулка - полый цилиндр и винт-гайка противоположны друг относительно друга, а шаг резьбы первой пары меньше шага резьбы второй. 2 ил.
Изобретение относится к обработке металлов давлением, в частности к ручным устройствам для гибки труб, используемым преимущественно в монтажных условиях.
Известно устройство для гибки труб, содержащее гибочный шаблон, подвижные ги- бочные ролики, установленные на параллельных осях, механизм привода в виде смонтированных на рукоятке неподвижного и подвижного блоков. Последний закреплен на оси с возможностью возвратно-поступательного перемещения. К оси прикреплен гибкий канат, с помощью которого связаны между собой подвижный и неподвижный блоки. На неподвижном блоке выполнен храповой механизм с рычагом привода.
Недостатком известного устройства является низкая надежность из-за наличия гибких связей, возможность использования только мускульного источника энергии.
Наиболее близким к заявляемому и взятым за прототип является переносной тру- богиб. содержащий корпус, гибочные ролики, рабочий гидроцилиндр со штоком, на котором закреплен гибочный шаблон, резервуар, а также гидронасос привода гидроцилиндра. Такая конструкция позволила уменьшить габариты и упростить устройство, что повысило его надежность, но не снизила мощность привода устройства.
Цель изобретения - повышение надежности и уменьшение энергоемкости.
Поставленная цель достигается тем, что в устройстве для гибки труб, содержащем
ч
00
4 vj
смонтированный на корпусе с возможностью возвратно-поступательного перемещения перпендикулярно оси гибки гибочный шаблон с хвостовиком, жестко соединенным с валом привода и гибочные ролики, установленные симметрично относительно оси гибки посредством параллельно расположенных осей на средстве для их крепления, согласно изобретению, в корпусе выполнены направляющий паз для перемещения гибочного шаблона и дополнительный направляющий паз, хвостовик гибочного шаблона выполнен в виде резьбовой пары винт-гайка, причем гайка выполнена в виде смонтированного в корпусе посредством подшипниковых опор полого цилиндра с наружной резьбой, средство для крепления гибочных роликов выполнено в виде установленного с возможностью возвратно-поступательного перемещения в дополнительном направляющем пазу корпуса перпендикулярно оси гибки вилкообразного кронштейна, соединенного с полым цилиндром посредством резьбовой втулки, при этом направление резьбы резьбовой пары винт-гайка противоположно направлению резьбы пары втулка кронштейна - полый цилиндр, а шаг резьбы первой пары больше шага резьбы второй.
Уменьшение энергоемкости устройства для гибки труб достигнуто снабжением его винтовым редуктором, состоящим из полого цилиндра с внешней и внутренней резьбой, установленным в подшипниковом узле, из резьбовой втулки, установленной на внешней резьбе полого цилиндра, на которой закреплен вилкообразный кронштейн, и винта, на котором закреплен гибочный шаблон, установленного во внутренней резьбе гайки полого цилиндра.
Направление резьбовой пары винт- гайка полого цилиндра противоположно направлению резьбовой пары втулка кронштейна - полый цилиндр и шаг резьбы первой пары больше шага второй.
Передаточное отношение винтового редуктора зависит от разности шагов первой и второй резьбовых пар.
Такое выполнение резьбовых пар винтового редуктора обеспечивает при враще- нии полого цилиндра перемещение вилкообразного кронштейна с гибочными роликами и гибочного шаблона в одном направлении.
При этом за счет разности шагов резьбовых пар винтового редуктора, скорость перемещения гибочного шаблона будет больше скорости вилкообразного кронштейна при перемещении их относительно полого цилиндра. Скорость относительного
перемещения гибочного шаблона к вилкообразному кронштейну по полому цилиндру зависит от разности шагов первой второй резьбовых пар.
5 При работе заявляемого устройства (при гибке трубы, установленной между гибочными роликами вилкообразного кронштейна и гибочным шаблоном) нагружаются только резьбовые пары винтового редукто0 ра. Другие элементы не нагружаются дополнительно в процессе гибки трубы. Тем самым достигается дополнительный эффект - уменьшение массы устройства, т.к. слабо нагружаемые составные части могут быть
5 выполнены пустотелыми и из алюминиевых сплавов.
Таким образом, поставленная цель-повышение надежности и уменьшение энергоемкости может быть достигнута заявляемой
0 совокупностью отличительных признаков. При этом, в информационных источниках не выявлены аналогичные пути решения задачи, что свидетельствует о выполнении условия патентоспособности изобретательский
5 уровень.
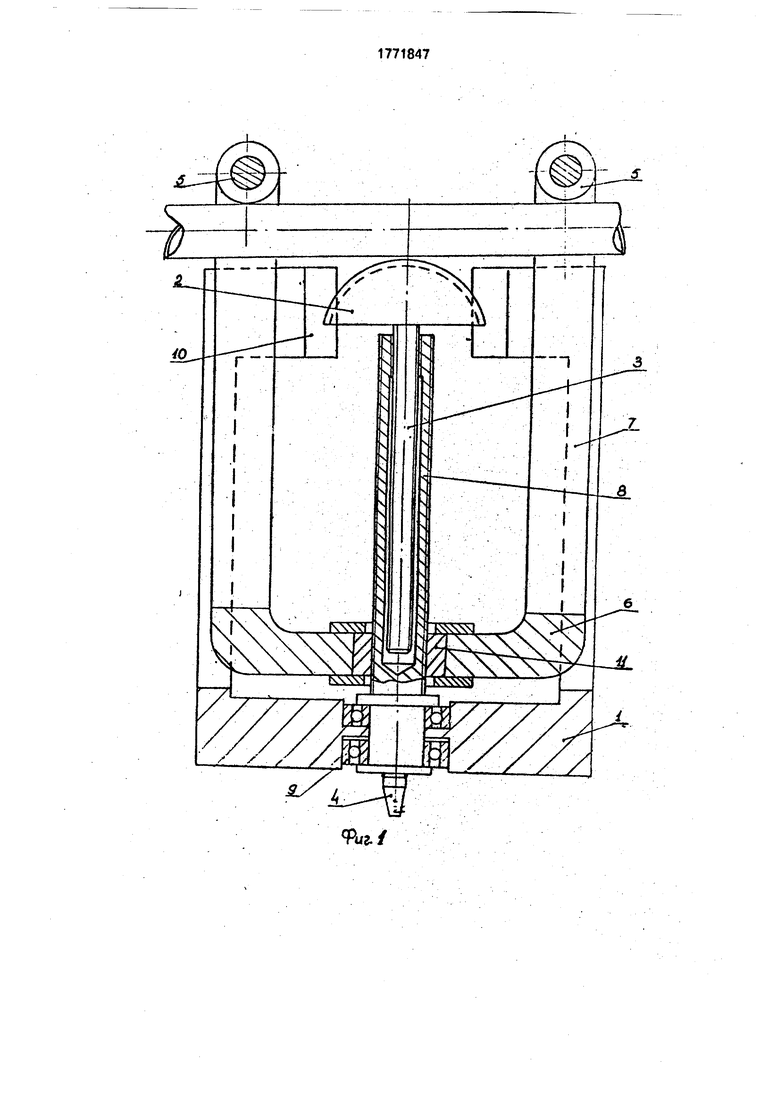
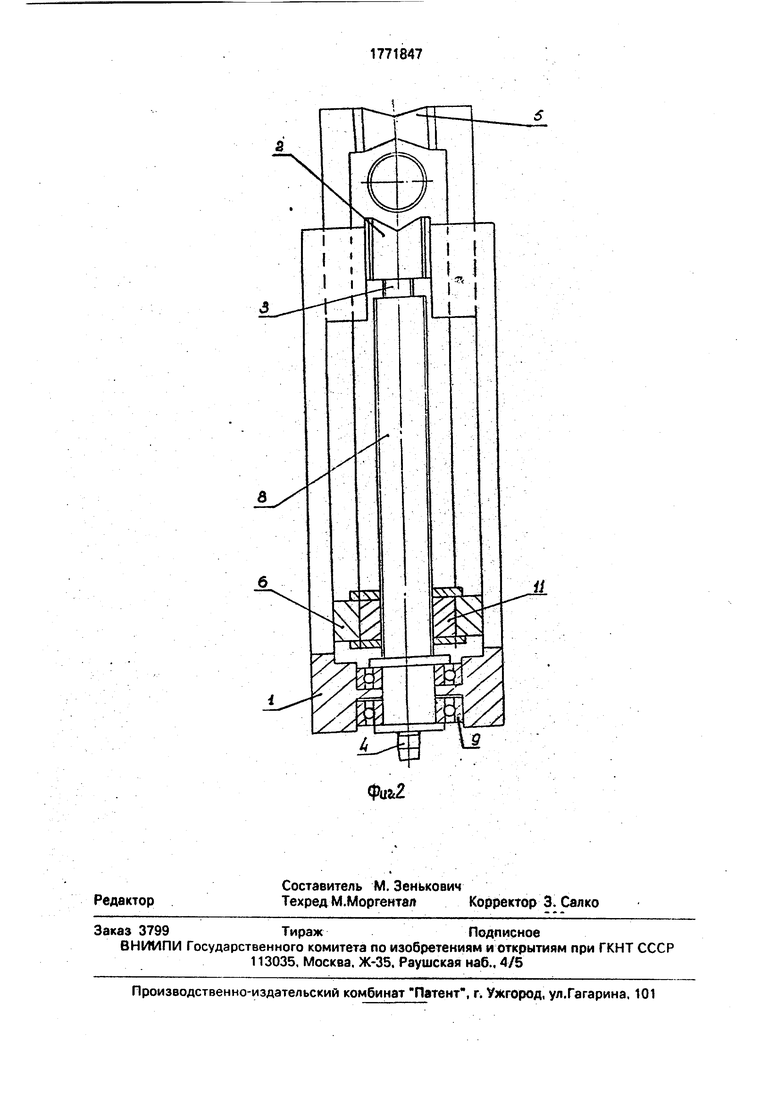
На фиг. 1 показано предлагаемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку.
Устройство для гибки труб содержит
0 корпус 1, на котором смонтирован с возможностью возвратно-поступательного перемещения перпендикулярно оси гибки гибочный шаблон 2 с хвостиком - винтом 3, жестко соединенным с валом 4 привода,
5 и габочные ролики 5. установленные симметрично относительно оси гибки посредством параллельно расположенных осей на вилкообразном кронштейне 6, установленном с возможностью возвратно-поступа0 тельного перемещения в дополнительном направляющем пазу 7 корпуса 1 перпендикулярно оси гибки. Хвостовик - винт 3 гибочного шаблона 2 выполнен в виде резьбовой пары винт-гайка, причем гайка выполнена
5 в виде полого цилиндра 8 с наружной резьбой, смонтированного в корпусе 1 посредством подшипниковых опор 9. В корпусе 1 выполнен направляющий паз 10 для перемещения гибочного шаблона 2. Вилкообраз0 ный кронштейн 6 соединен с полым цилиндром 8 посредством резьбовой-втулки 11. Направление резьбы резьбовой пары винт-гайка противоположно направлению резьбы пары втулка 11 кронштейна б - по5 лый цилиндр 8, а шаг резьбы первой пары больше шага резьбы второй. В примере к,он- кретного выполнения устройства это соответственно 3 мм и 3,5 мм.
Работа устройства. Трубу - заготовку
устанавливают между гибочным шаблоном
2 и гибочными роликами 5. Включают привод. Вал 4 привода вращается относительно корпуса 1 устройства в подшипниковых опорах 9. От вала 4 вращается полый цилиндр 8. Вращение цилиндра 8 через резьбовую втулку 11 приводит к поступательному движению вилкообразного кронштейна 6 в дополнительном направляющем пазу 7 корпуса 1. Гибочные ролики 5 при этом поступательно перемещаются от трубы-заготовки. Вращение цилиндра 8 приводит одновременно к поступательному перемещению хвостовика - винта 3 и гибочного шаблона 2 в направляющем пазу 10 корпуса 1 в направлении к трубе-заготовке. Однонаправленное перемещение кронштейна 6 и шаблона 2 обусловлено разнонаправлен ностью резьбы в резьбовых парах. За счет того, что шаг резьбы пары винт-гайка больше шага резьбы пары втулка It кронштейна 6 - полый цилиндр 8 скорость перемещения гибочного шаблона 2 превышает скорость перемещения гибочных роликов 5 и труба - заготовка будет изгибаться по шаблону 2 при смыкании гибочных роликов с гибочным шаблоном.
Описание конструкции устройства и его работы подтверждают возможность его практического использования, что соответствует выполнению условия патентоспособности промышленная применимость.
Формула изобретения Устройство для гибки труб, содержащее смонтированный на корпусе с возможностью возвратно-поступательного перемещения перпендикулярно оси гибки гибочный шаблон с хвостовиком, жестко соединенным с валом привода и гибочные ролики, установленные симметрично относительно оси гибки посредством параллельно расположенных
осей на средстве для их крепления, отличающееся тем, что. с целью повышения надежности и уменьшения энергоемкости, о корпусе выполнены направляющий паз для перемещения гибочного шаблонов и дополнительный направляющий паз, хвостовик гибочного шаблона выполнен в виде резьбовой пары винт-гайка, причем гайка выполнена в виде смонтированного в корпусе посредством подшипниковых опор полого
цилиндра с наружной резьбой, средство для крепления гибочных роликов выполнено в виде установленного с возможностью возвратно-поступательного перемещения в дополнительном направляющем пазу
корпуса перпендикулярно оси гибки вилкообразного кронштейна, соединенного с полым цилиндром посредством резьбовой втулки, при этом направление резьбы резьбовой пары винт-гайка противоположно направлению резьбы пары втулка кронштейна - полый цилиндр, а шаг резьбы первой пары больше шага резьбы второй.
Фиг./
2
| Переносной трубогиб | 1978 |
|
SU667281A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
